







v-rep运用ompl规划库与Python控制完成抓取
笔者工作环境配置
Ubuntu16.04
vscode
CoppeliaSim_Edu_V4_1_0_Ubuntu16_04 (v-rep新版本名字)
在使用v-rep时候,有多个语言借口,lua,c/c++,MATLAB,Python等等,本文在使用Python控制时候,遇到很多麻烦的问题,ompl规划库没有Python的api借口,所以只能将ompl的规划库用lua写出然后再进行调用。由由于例子(例子放在我的gitee中ur5-python-v-rep)给出的ompl规划库只能进行各个关节角度目标位置,并不能根据末端的位置进行路径规划,当然,这是笔者存在的一个问题,需要改进。
所以本文的思路是:
思路步骤
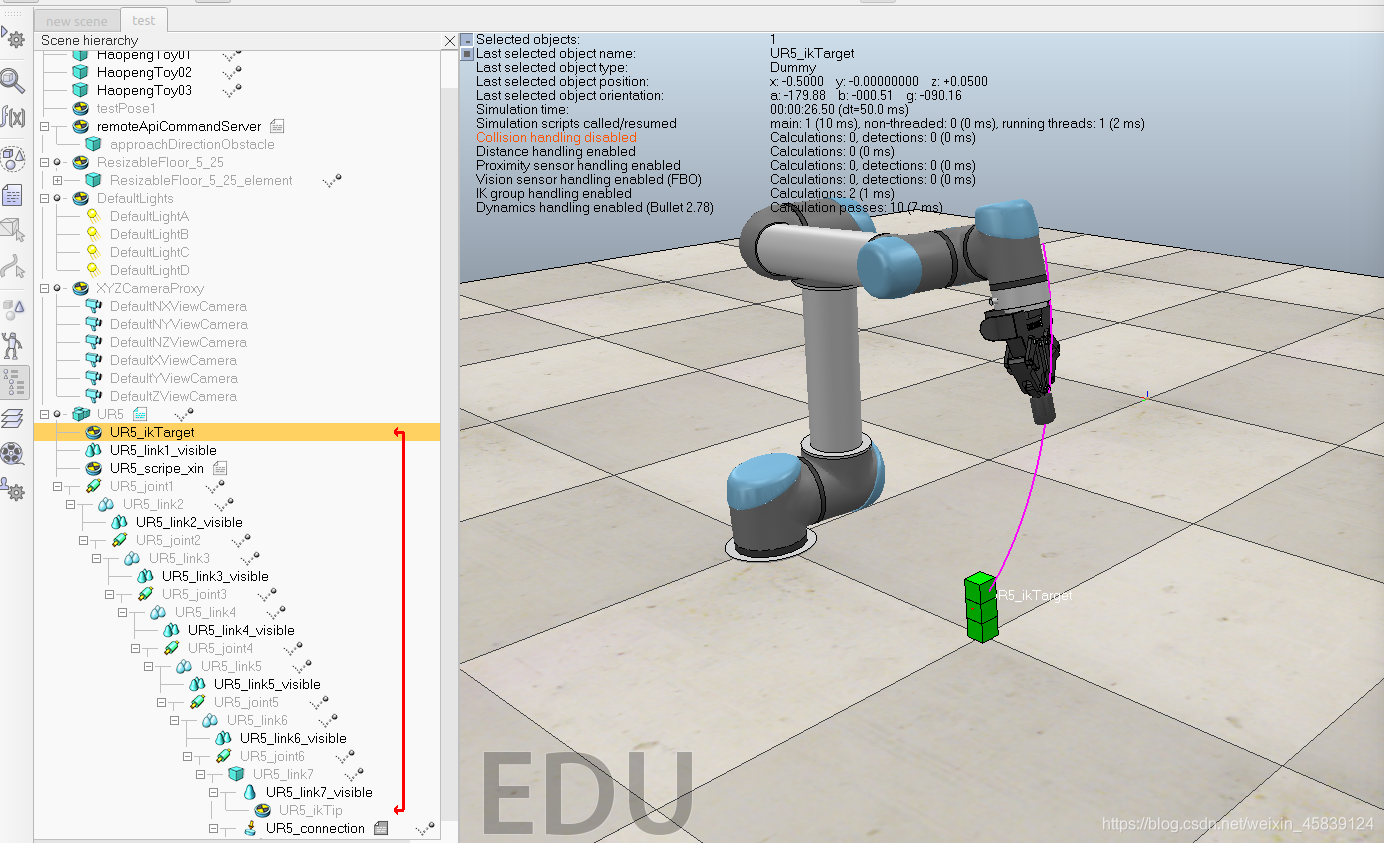
第一步:将ompl规划路径运用lua语言创建出来,下图中的第一部分就是,标号为1的俩个框是进行路径规划的编写以及函数定义,方便调用,然后采用Python进行调用。
第二步:运用v-rep中的逆规划组,运用lua语言求出起各个关节的角度值,通过Python调用。
第三步:编写Python程序进行ik逆规划组的调用和ompl的路径规划调用。

程序测试:
本程序暂时只能初步设定target的位置,然后检测target的位置,运动到目标位置,具体的程序还有待完善。
已经将我的程序文档和scence放到csdn中,有需要的可以下载,下载链接:
https://download.csdn.net/download/weixin_45839124/14015187
第二版,通过改变target目标的位置和姿态,即可实时得到运动到目标位置的逆运动,下载链接:
https://download.csdn.net/download/weixin_45839124/14017341
参考文档:
VREP学习路路径 | Learning path of V-REP
https://www.coppeliarobotics.com/helpFiles/en/b0RemoteApi-python.htm
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











