










👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
将无人机航测技术应用于工程测量中可以有效提高测量效率与测量精度,通过对高分辨率影像数据的快速处理与反馈来获取质量较高的影像数据,但同时对无人机的拍摄能力和数据处理能力提出了更高的要求。目前,主流的无人机航测技术主要包括影像资料采集与数据处理两个系统,其中影像资料采集必须建立在无人机飞行控制系统与地面监控系统的基础上,通过操纵无人机沿着计划航线来获取相应的航拍影像资料。通常情况下,需要将航向重叠保持在70%,旁向重叠保持在50%。航拍相片重叠是指无人机对同一目标间隔相同距离的两个位置进行拍摄,因此无人机航拍对其数据信息处理能力具有较高要求。无人机航拍技术的数据信息处理整合能力不断增强,可以在短时间内对无人机航拍的大量相片进行处理分析,检测相片拍摄质量并对其预处理与更正。随着无人机航拍技术适应范围越来越大,其在工程测量中应用越来越广泛,其中遥感信息处理系统分为三维建模系统与空中三角测量系统。空中三角测量系统是无人机航测应用于工程测量的基础,可以有效提高航测精度。空中三角测量系统是对航带的整合处理,确定不同行带之间的关系,对影像通过定向分析整合,确定无人机航测影像的连接点设置,通过相控点与平差计算来构建完善的工程三维立体模型。
工程测量中应用无人机航测技术,无人机不需要专业驾驶员进行操作作业,只需要无人机控制人员对拍摄影像随时注意查看,注意观察无人机的飞行状态。无人机操作技术也越来越简单,小型无人机机身、体积及重量都大大减少,最小的无人机只有巴掌大小,在手上就可以实现起飞与降落。无人机航测技术相较于传统客机航测技术大大减少了选择起飞降落地点的问题,其机身质量增加,在低空飞行可以很好地适应风向变化,降低飞行设备振动,避免对拍摄数据与图像采集造成影响。使用无人机航测技术只需要提前设定无人机飞行路线,随时观察无人机的飞行状态,根据实际情况修正。无人机系统发生问题时可以自行降落或飞回至起点排除故障,由于无人机结构简单,维修或零件更换成本较低,排除故障后可以重新飞行测量。
无人机航测技术具有数据采集能力强、精确度高的优点,对无人机操作人员技术水平要求较低,极大程度减少了无人机操作时间与数据分析处理时间,无人机自身所携带的高清摄影相机与专业测绘仪器,可以将工程拍摄影像质量大幅度提高,提升工程测绘精确度。无人机具有一定的智能与自动化,可以在一定程度减少工作压力,提高工作效率质量。无人机还可以使用低空遥感模式对工程地理信息完成勘测,不管在高空还是超低空下都可以正常完成测绘作业,广泛应用于工程测量与应急救援领域中。
无人机测绘技术在工程测量中应用具有较短的飞行周期,可以实现快速起飞降落,在数据获取分析及处理中,只需要投入较少时间。无人机测绘技术成本相较于传统客机测绘技术成本非常低,主要由于无人机制造材料成本低,保养频率低,零件构造简单,后期维修费用少,极大程度减少了工程测绘成本。无人机具有简单的操作模式,测绘人员可以在短时间内学会无人机设备操作和拍摄程序的使用,无需再投入其他成本,具有使用成本低的优点。
工程测量中使用无人机航测技术,要获取工程数据资料就必须根据实际情况选择合适的测量方法,根据工程不同测量区域内容来选择合适的测量技术,将测量数据及时反馈处理,确保数据信息获取质量。完成无人机航测数据采集,在记录过程中开始二次航测,分解无人机飞行路线,确保飞行路线更加准确与全面,在收集航测数据过程中采取有效措施提高无人机摄像分辨率,使数据质量更高。获取无人机航测数据时,不但要对其进行检测,还要通过数据分析技术对检测获取的数据进行分析,使数据资料精确度更高。
📚2 运行结果
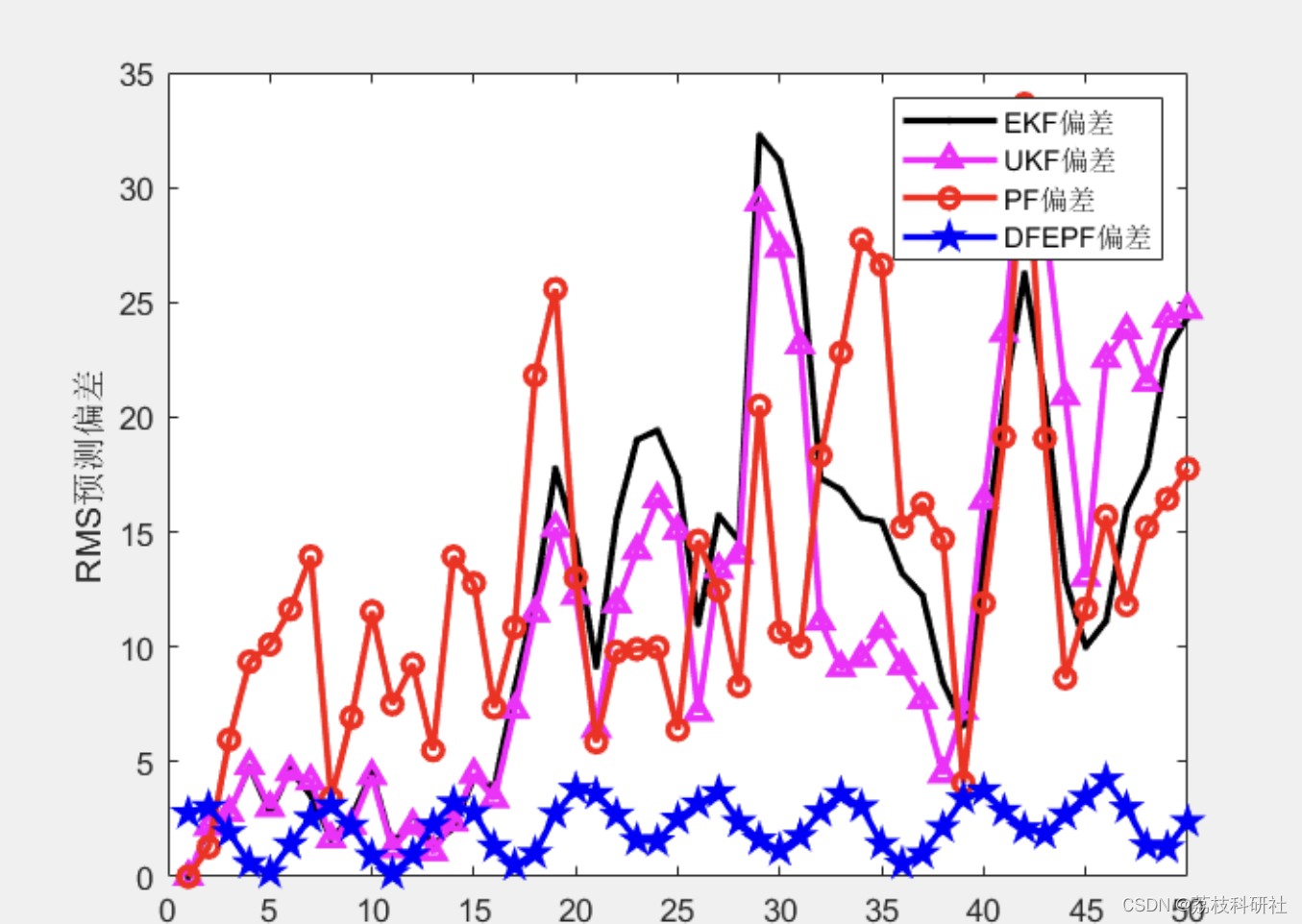
- 分别对x、y、z三个方向的位置、速度、加速度进行预测(9维)
- 通过距离、俯仰角、横向角进行观测(3维)
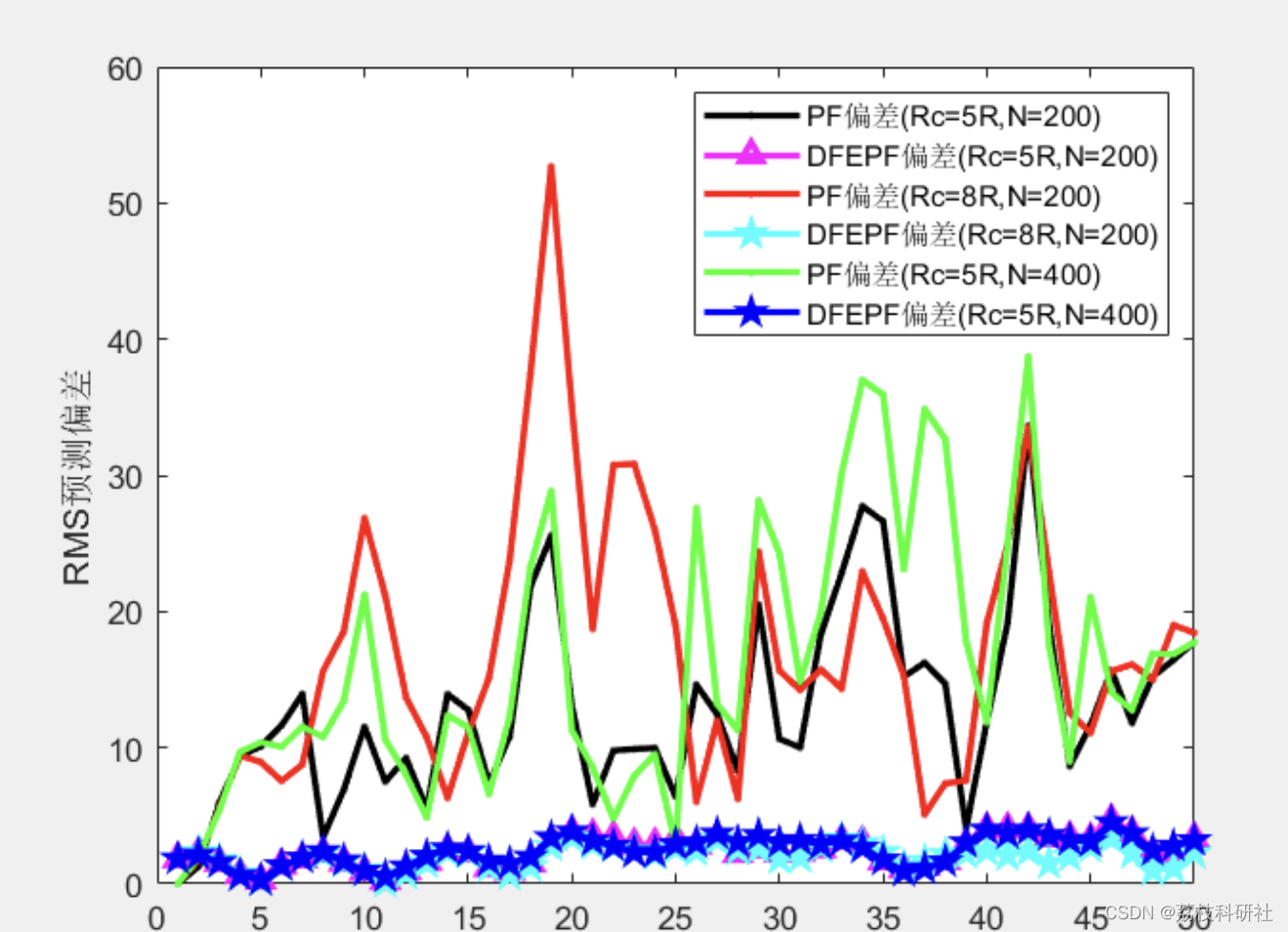
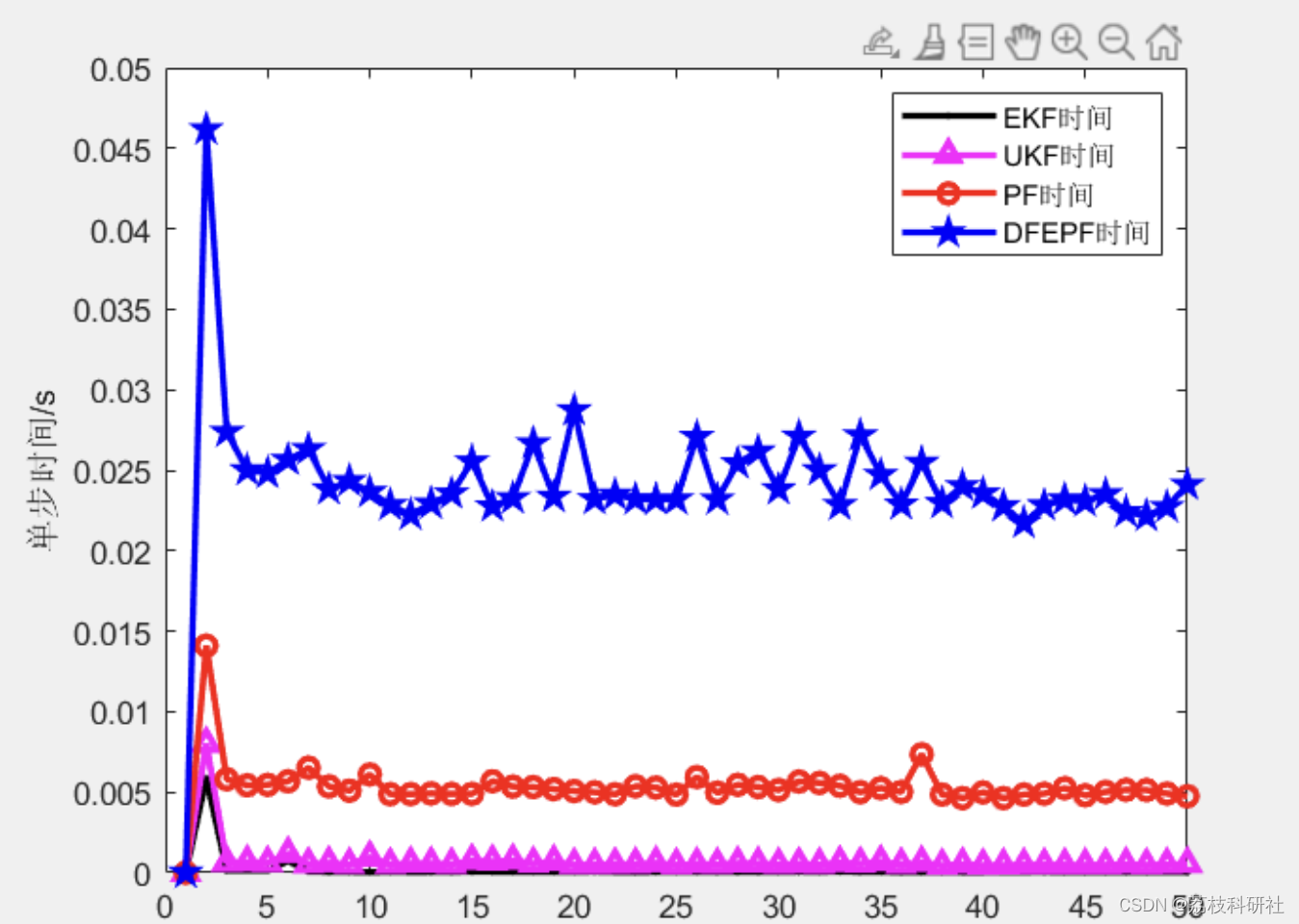
- 改进了传统的粒子算法,并与传统的非线性滤波EKF、UKF、PF算法进行对比

% 功能说明:ekf,ukf,pf,改进pf算法的无人机航迹预测比较程序
function main
% 因本程序涉及太多的随机数,下面让随机数每次都不变
rand('seed',3);
randn('seed',6);
% error('下面的参数T请参考书中的值设置,然后删除本行代码')
n = 9;
T = 50;
Q= [1 0 0 0 0 0 0 0 0; % 过程噪声协方差矩阵
0 1 0 0 0 0 0 0 0;
0 0 1 0 0 0 0 0 0;
0 0 0 0.01 0 0 0 0 0;
0 0 0 0 0.01 0 0 0 0;
0 0 0 0 0 0.01 0 0 0;
0 0 0 0 0 0 0.0001 0 0;
0 0 0 0 0 0 0 0.0001 0;
0 0 0 0 0 0 0 0 0.0001];
R = [5000 0 0; % 观测噪声协方差矩阵
0 0.01^2 0 % 角度的观测值偏差不能给的太大
0 0 0.01^2];
% 系统初始化
X = zeros(9,T); % 真实值
Z = zeros(3,T);
近年来,无人机航测技术在工程测量领域中应用越来越广泛。相较于传统航测技术,无人机航测技术具有投入成本低、操作简单及拍摄精度高的优点,可以有效提高工程测绘工作效率质量。技术人员依据无人机航测技术特点,采用正确操作流程,可以有效提高无人机航测技术数据采集的准确度,获得更加精准的工程数据,促进工程建设顺利展开。
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]李帅,张杰,杜立杰,李盼.工程测量中无人机航测技术的应用[J].黑龙江科学,2022,13(16):56-58.
















 576
576

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











