






👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
PID控制器在工业应用中得到了广泛的应用,主要用于线性化系统。传统的PID控制器对系统模型的非线性和模型的不确定性处理较差。克服这些问题的许多方法之一是使用Wang和Yu提供的“基于神经元的非线性pid控制器”。
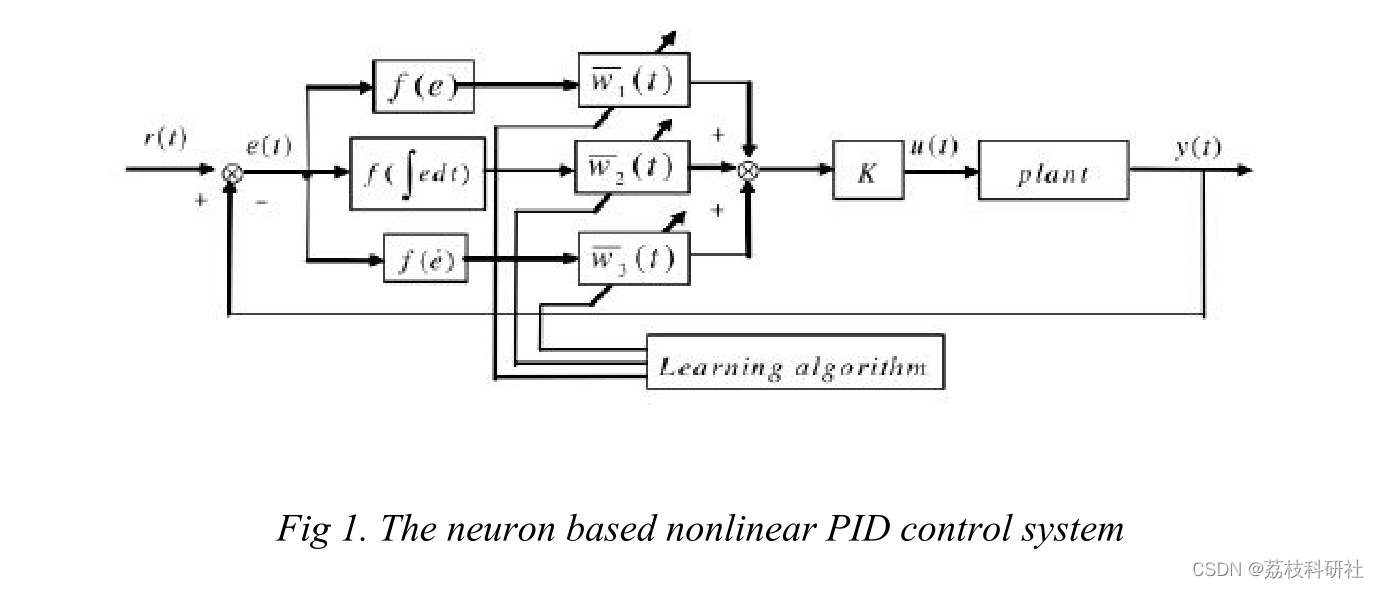
在这种控制方法中,每个神经元的权值在一个循环中更新。这意味着它是一个“在线”算法。因此控制信号可表示为:
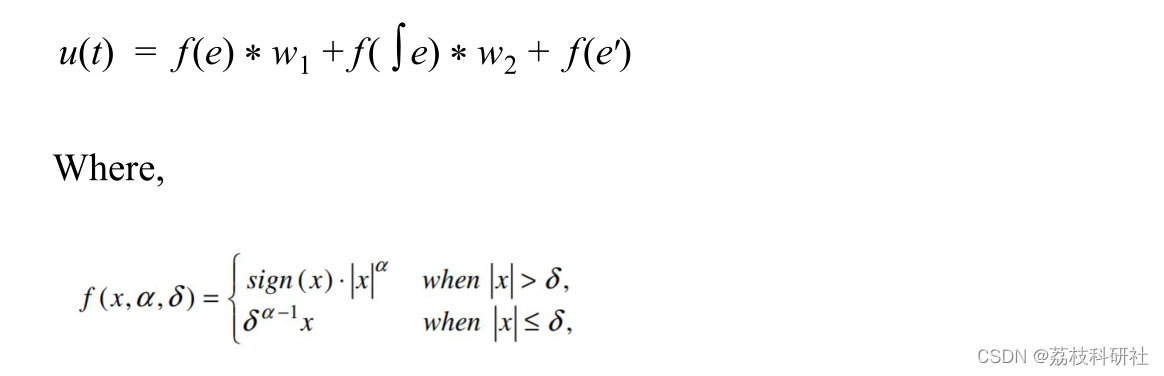
这个非线性函数第四部分进行Matlab编程”。参数在(0,1)之间。当α使非线性函数线性化时。δ是一个很小的正数,用于产生a1α =这个非线性函数中x在0附近时的小线性面积。因为每个神经元都有自己的参数。
基于遗传算法的模糊PID控制器整定研究是一种将遗传算法与模糊控制理论相结合,以实现对PID控制器参数(比例系数Kp、积分时间Ti、微分时间Td)进行优化整定的方法。这种方法旨在提高控制系统的性能,如稳定性、快速性和准确性等。下面是这种研究的基本框架和几个关键点:
基本原理
-
遗传算法:遗传算法是一种模拟自然选择和遗传机制的全局优化搜索算法。它通过模拟生物进化过程中的选择、交叉(杂交)和变异等操作,对一组解(称为种群)进行迭代优化,最终找到问题的最优或近似最优解。
-
模糊PID控制:传统的PID控制器是基于精确数学模型设计的,而模糊PID控制器则引入了模糊逻辑,允许使用语言变量(如“大”、“中”、“小”)来描述控制器的行为,更适合于处理非线性、时变或不确定性的系统。模糊PID控制器通常由三个部分组成:模糊化、规则库、解模糊化,用以实现对PID参数的动态调整。
研究流程
-
问题定义:明确控制对象及所需达到的控制目标,比如系统的响应速度、稳态误差等指标。
-
编码与初始化:将PID控制器的参数Kp、Ti、Td转化为遗传算法中的染色体(即解的编码形式),并随机生成初始种群。
-
适应度函数设计:根据控制系统的要求,设计适应度函数来评估每个个体(即一组PID参数)的优劣,通常与系统的稳态误差、超调量、调节时间等性能指标相关。
-
遗传操作:执行遗传算法的核心步骤——选择、交叉、变异,生成新的种群。选择过程是根据适应度值挑选优秀个体;交叉模拟生物遗传,交换两个个体的部分基因信息;变异则是随机改变某些基因值,以增加种群多样性。
-
终止条件判断:设定迭代次数上限、适应度提升阈值等作为停止条件。当满足任一条件时,算法结束。
-
结果解码与应用:将最优染色体解码回PID参数的实际数值,并应用于控制系统中,观察并验证其性能。
关键技术点
- 适应度函数的精确设计:直接关系到遗传算法能否有效寻找到最优解。
- 遗传参数的调整:包括种群大小、交叉概率、变异概率等,需要根据具体问题进行细致调整以获得最佳效果。
- 模糊规则的设计:模糊PID控制器的规则库需依据控制对象特性精心设计,以实现对不同工况的灵活适应。
- 参数自整定能力:通过遗传算法不断优化,使模糊PID控制器能根据系统运行状态动态调整参数,增强控制效果。
基于遗传算法的模糊PID控制器整定研究,通过结合遗传算法的全局优化能力和模糊控制的灵活性,为复杂控制系统提供了一种有效的参数整定方法,特别适合于难以建立精确数学模型的场合。
📚2 运行结果
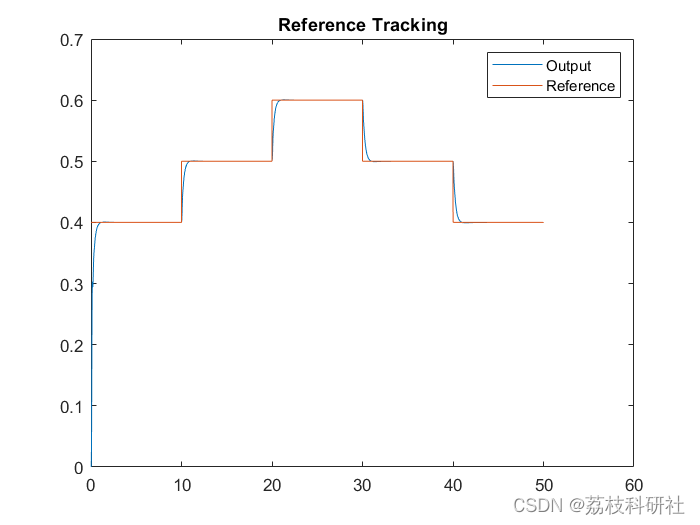
2.1 单位步进跟踪
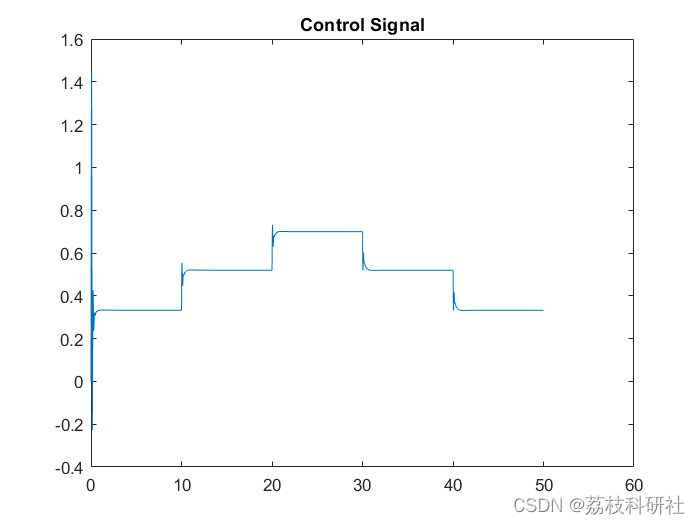
2.2 单位阶跃参考控制信号
2.3 总结
通过遗传算法最小化代价函数,取得了成功的结果。
这是一个预期的结果,因为为了最小化成本函数,我们应该最小化两件事跟踪误差和控制努力。我可以通过长时间运行遗传算法获得更好的结果,因为这些结果足够好,我决定停止算法。我还应该指出,增加会增加成本函数,并使找到正确的λ参数变得更加困难。因为我已经取得了很好的结果没有惩罚太多的控制努力。所以局部最小值应该在参数的最小差异之间。这是用遗传算法进行优化时所期望的现象。该算法完全随机生成种群,这使得它是一个随机过程,有时很难找到敏感的局部最小值。
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]蒋勇,陈华.基于GA的工程整定模糊PID烧结温度控制器[J].轻金属,2011(07):19-22.DOI:10.13662/j.cnki.qjs.2011.07.001.
[2]张鹏. 基于伸缩因子的模糊PID自整定液位控制系统研究[D].武汉科技大学,2009.

















 2162
2162

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











