






👨🎓个人主页
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
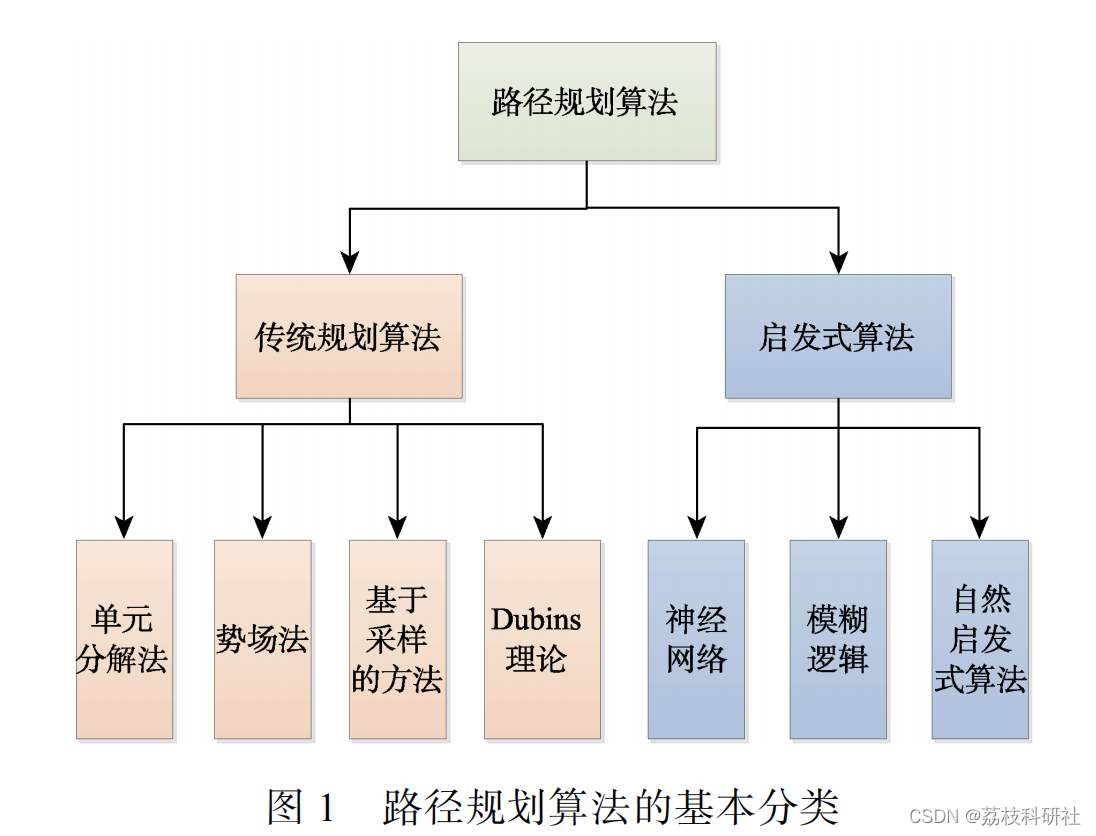
💥1 概述
一、RRT算法的基本原理与应用
1. 基本原理
快速探索随机树算法
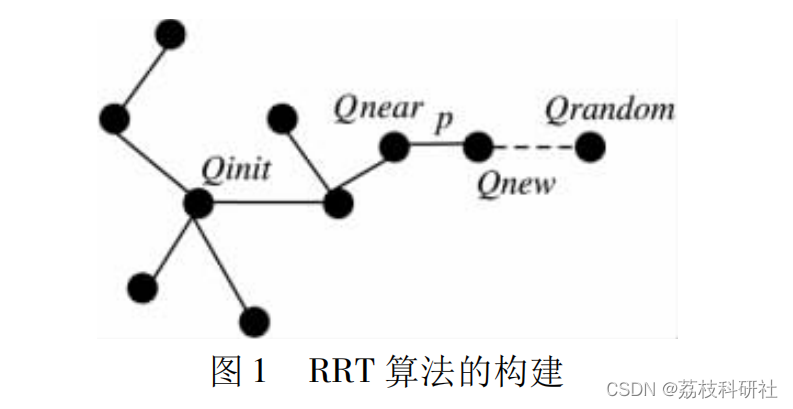
令 Tk 为一个有 K 个节点的 RRT,Q 为 Tk 的节点,Cfree 为与障碍物无碰撞的机器人自由状态空间。定义 Qinit 为初始状态即起点,Qgoal 为目标状态即终点。令 Qrand 为空间中一个随机选取的位姿状态,然后找出 Tk 中距离 Qrand 最近的节点Qnear。设p,q∈Cfree,令D( Qnear,Qrand) ≤D( Q,Qrand) 。在 Qrand 与 Qnear 连线上求 Qnew,Qnew 必须满足 Qnew ∈ Cfree 且 D( Qnear,Qrand) = ρ的条件,其中 ρ > 0,为 RRT 生长的最小单位长度,称为步长。如果存在 Qnew,则 Tk 增加一个新节点; 否则重新选取 Qrand,重复以上过程。初始的 RRT 算法的构建过程如图 1 所示。
Dubins 理论
Dubins 于 1957 年提出了 Dubins 曲线理论,主要内容是在满足一定曲率条件下,连接同一平面内具有特定方向向量的任意两点的最短轨迹是曲线[20]。在没有其他约束因素的情况下,同一平
面上的任意两点的最短路径是直线,但是在有一定的曲率约束的情况下,最短的路径则是圆弧。
Dubins 曲线理论主要用来求解有曲率约束的最短路径。通过选择两条与两个圆相切的切线中的一
条,可以得到 Dubins 路径,其中起始和终止位置都在圆弧上。圆弧的半径是曲率半径,它由无人
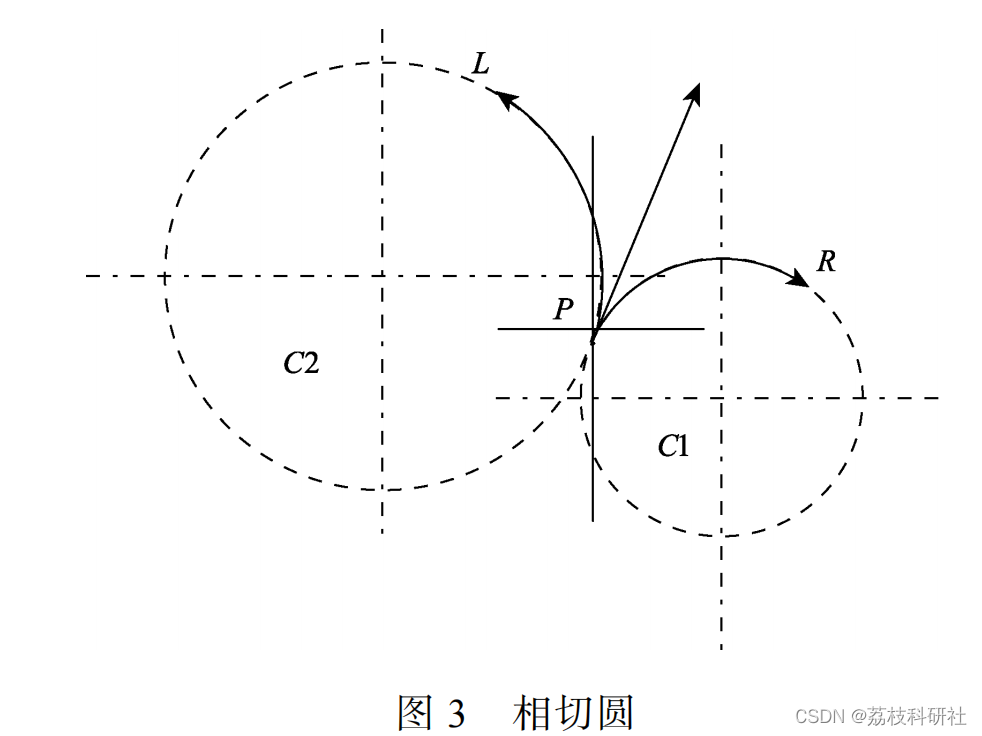
系统的转弯半径决定,圆弧中心就是曲率中心,于是该问题就简化为寻找两个圆弧的公切线。两
圆之间有两种公切线:内切线、外切线。在给定位姿点下,无人系统可以向左转和向右转,路径可以以顺时针方向和逆时针方向结束。一个给定的位姿点上有两种转弯方式,因此有两个相切圆,如图 3 所示。一个向右转弯,在弧段 C1上标记 R ,另一个是向左转弯,在弧段 C2 上标记 L ,一个位姿点可以产生 4 条 Dubins 路径。即 LSL, LSR, RSL ,RSR ,如图 4 所示。
RRT(快速探索随机树)是一种基于采样的路径规划算法,由Steven M. Lavalle于1998年提出。其核心思想是通过随机采样和树状扩展探索高维空间,逐步构建从起点到目标的可行路径。算法流程包括:
- 随机采样:在配置空间中随机选取目标点。
- 最近邻搜索:在现有树中找到距离目标点最近的节点。
- 扩展与碰撞检测:向目标方向扩展步长,若新节点无碰撞则加入树中。
- 迭代收敛:重复直到路径到达目标或达到最大迭代次数。
2. 改进算法
- RRT*:引入重连接机制,优化路径长度和平滑度,实现渐近最优。
- RRT-smart*:结合智能采样策略,减少冗余节点并优化路径直线性。
- Informed RRT*:通过椭圆区域限制采样空间,加速收敛。
- 双向RRT(RRT-Connect) :从起点和目标点双向生长树,提升效率。
3. 应用场景
- 机器人导航:适用于非凸、高维环境下的避障。
- 无人机航迹规划:结合滚动窗口策略处理未知环境。
- 自动驾驶:优化轨迹以最小化能量消耗或转弯半径。
二、Dubins路径规划的定义与数学特性
1. 定义
Dubins路径是满足最小转弯半径约束的最短路径,由直线段(S)和圆弧段(L/R,左/右转)组成,共有6种类型(如LSL、RSR等)。其数学特性包括:
- 曲率约束:路径需满足最大曲率(即最小转弯半径)。
- 几何组合:通过微分几何原理生成连续路径。
2. 局限性
- 路径不连续性:圆弧与直线连接处的曲率突变,需车辆停顿调整转向。
- 动态适应性差:仅适用于静态环境,需结合其他算法处理动态障碍。
三、RRT与Dubins路径的结合策略
1. 结合动机
- 运动学约束:Dubins路径确保生成的路径满足车辆转弯半径限制。
- 全局探索能力:RRT的高效采样弥补Dubins在复杂环境中的路径搜索不足。
2. 具体方法
- RRT-Dubins:在RRT扩展时用Dubins曲线替代直线连接,确保运动学可行性。
- Dubins RRT*:通过重连接机制优化路径质量,并引入启发式函数加速收敛。
- 动态环境适应:结合滚动窗口和动态检测机制,实时更新路径以避开移动障碍。
3. 案例实现
- MATLAB仿真:通过替换RRT的边为Dubins曲线,生成平滑路径。
- 机械臂规划:利用Dubins曲线优化RRT*生成的轨迹,解决路径抖动问题。
四、避障技术与动态环境优化
1. 传感器融合
- 多传感器协同:激光雷达(精度高)结合超声波(低成本)和视觉(环境建模),提升障碍物检测鲁棒性。
- 数据融合算法:如D-S证据理论加权融合多源数据,减少误检。
2. 动态避障策略
- 实时重规划:检测到动态障碍后,快速调用RRT*或人工势场法重新规划路径。
- 预测与规避:通过历史轨迹预测障碍物运动,提前调整路径。
3. 改进算法
- 目标导向采样:以概率偏向目标点,减少随机性并提升收敛速度。
- 动态步长调整:根据环境复杂度自适应调整扩展步长,平衡探索与避障效率。
五、挑战与未来方向
1. 现有挑战
- 计算复杂度:高维空间下RRT的实时性不足,需硬件加速或并行计算。
- 动态环境适应性:多障碍物协同避障仍依赖全局重规划,效率较低139。
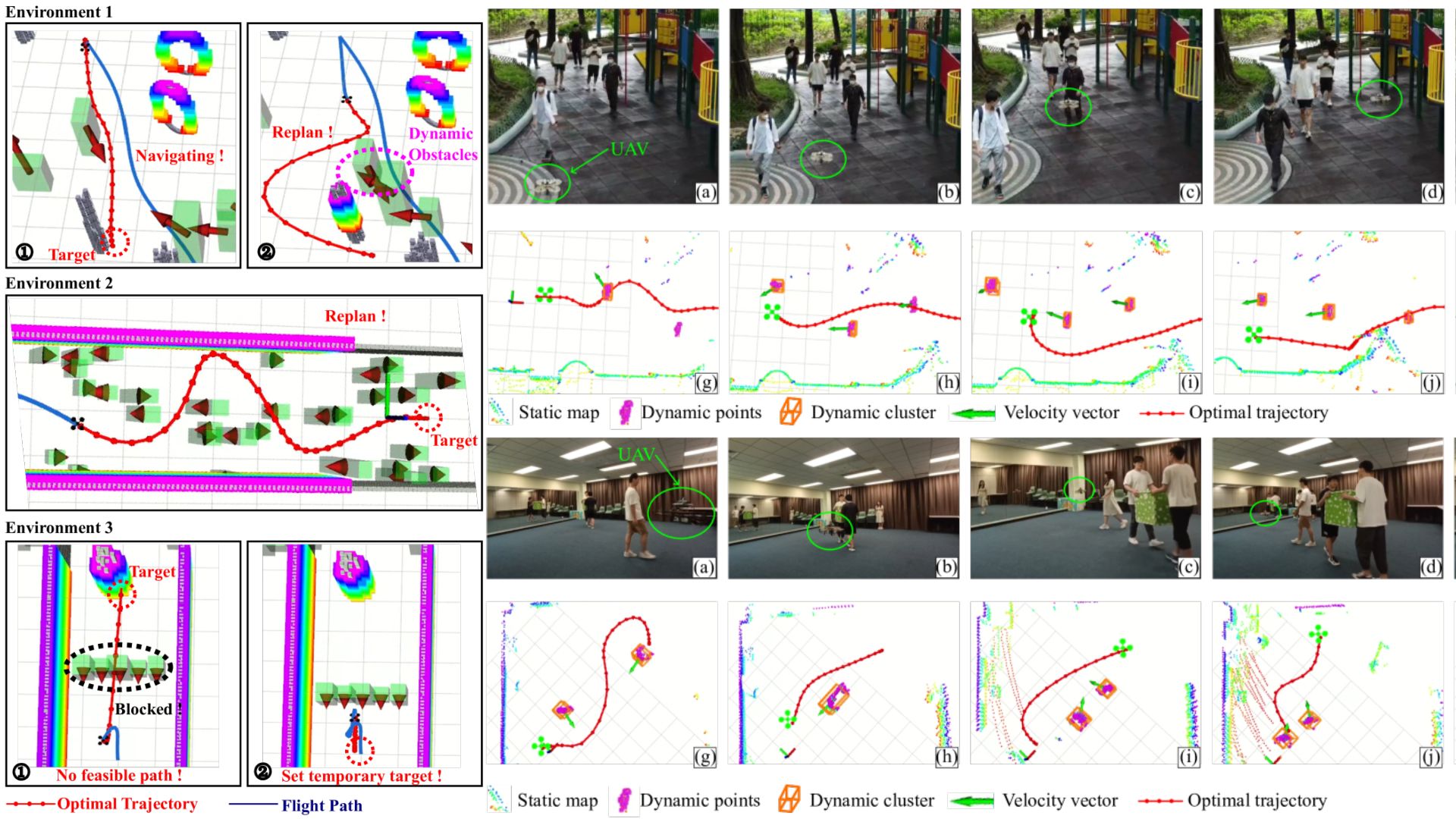
T-RO | 动态混乱环境中无人机的快速自适应感知与规划,仅凭单个雷达在人群中稳定飞行
01:31
2. 未来方向
- 深度学习融合:利用卷积神经网络(CNN)学习环境特征,优化采样策略。
- 多智能体协同:研究多机器人路径分配与避碰策略。
- 在线优化:结合模型预测控制(MPC)实现动态环境下的实时轨迹跟踪138。
轨迹优化|矩形增量膨胀安全走廊构建算法(附ROS C++/Python实现)
六、结论
RRT与Dubins路径的结合有效解决了运动学约束下的路径规划问题,在机器人、无人机和自动驾驶领域展现出广泛应用潜力。未来通过算法优化与多技术融合(如深度学习、多传感器协同),有望进一步提升复杂环境下的规划效率与安全性。
📚2 运行结果
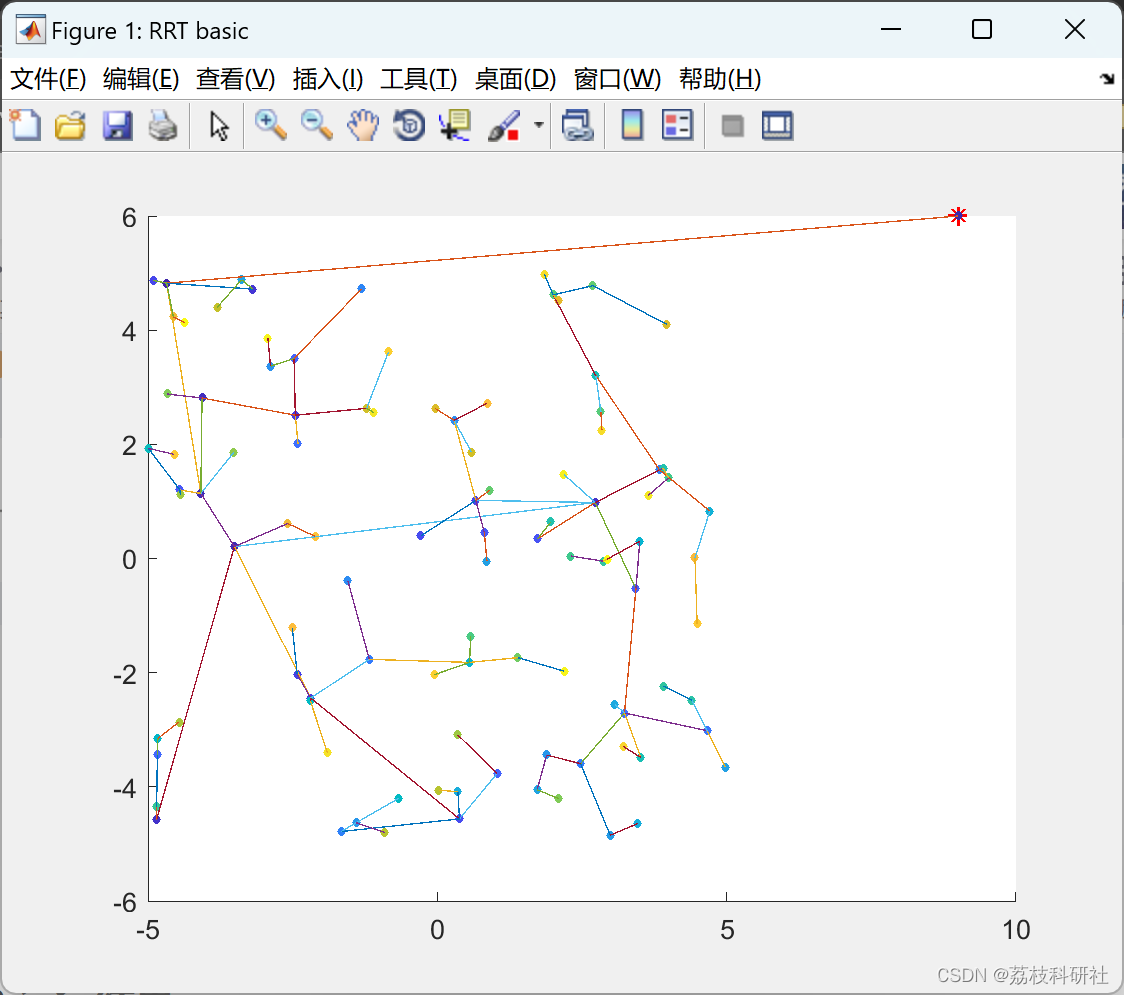
2.1 RRT
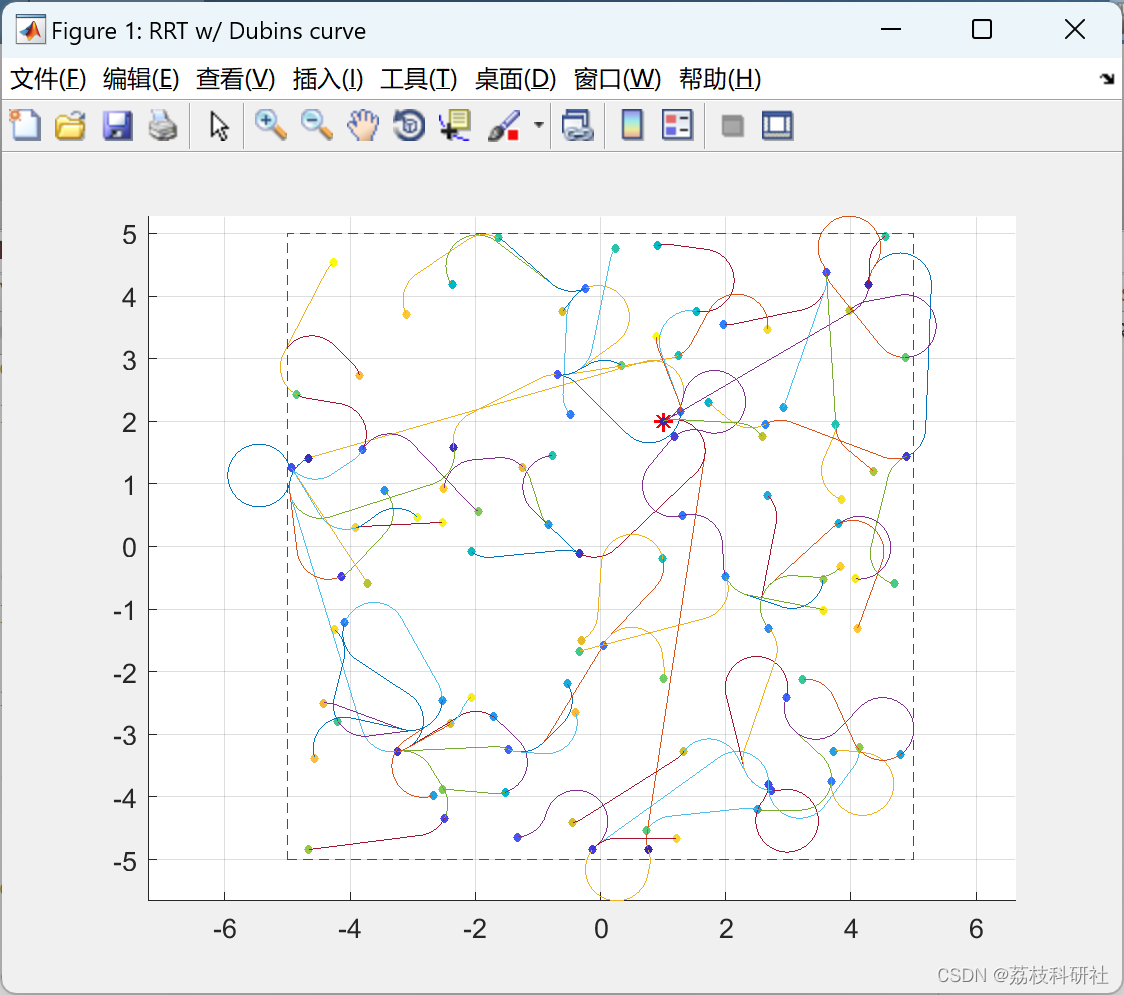
2.2 RRT_Dubins
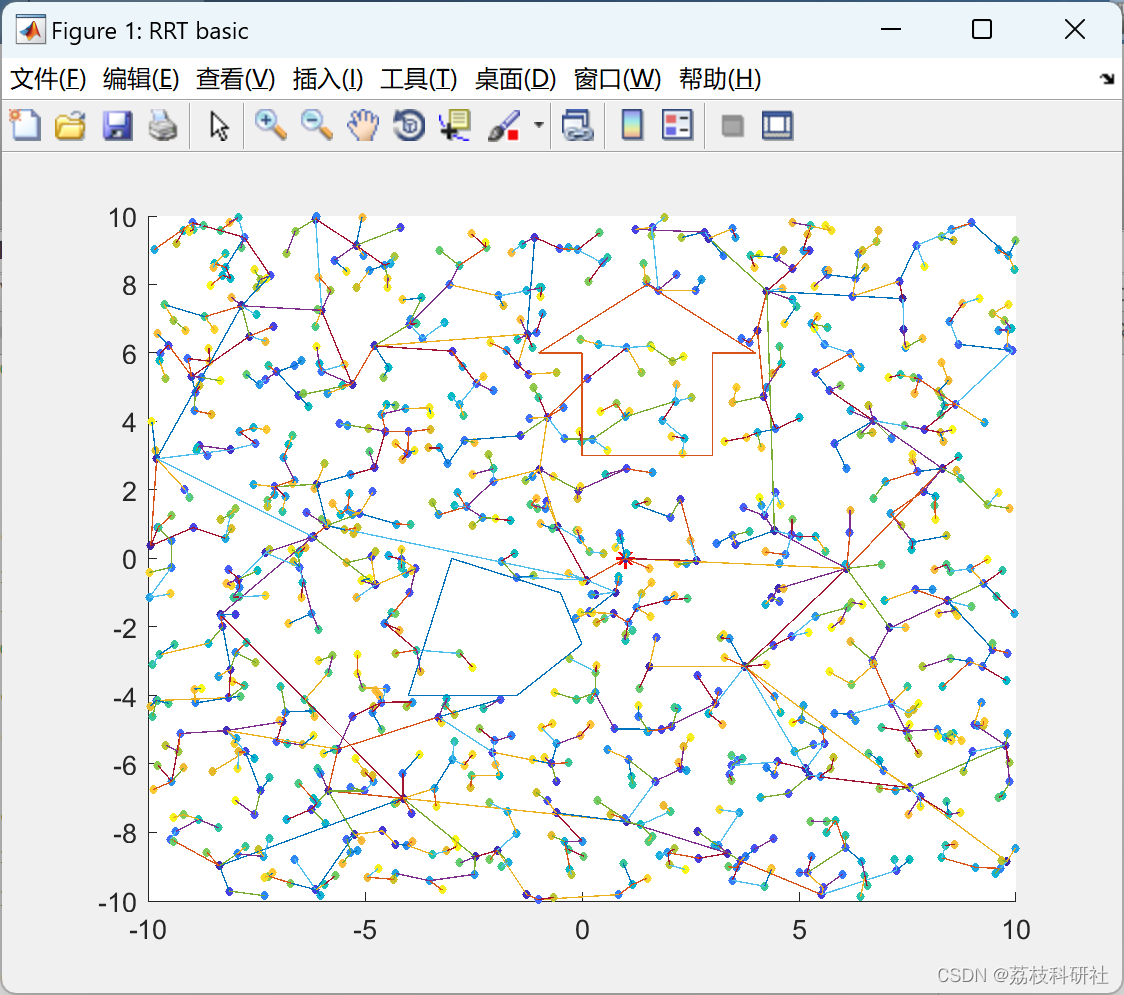
2.3 RRT_obstacles
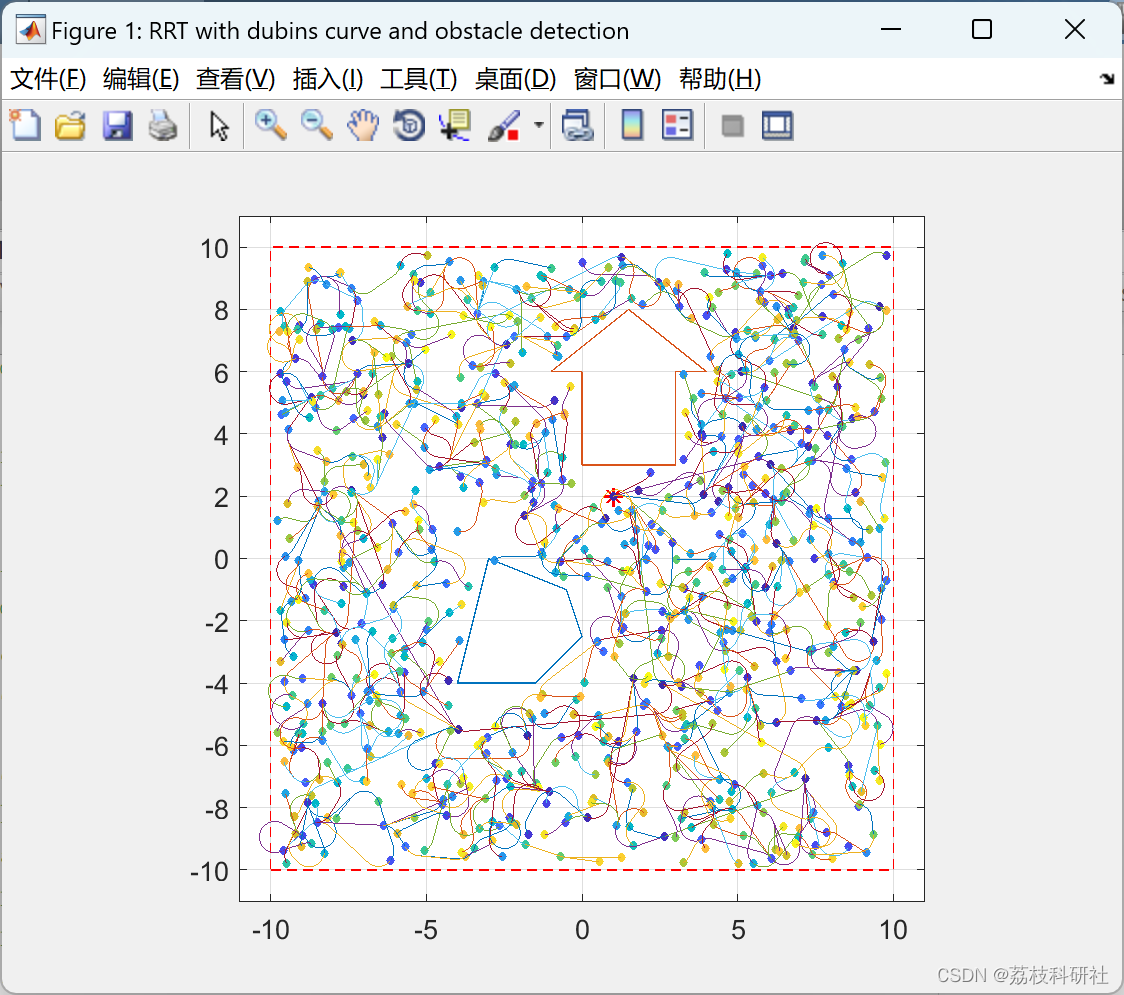
2.4 RRT_Dubins_obstacles
部分代码:
main_fig_name = 'RRT with dubins curve and obstacle detection';
close(findobj('type','figure','name',main_fig_name));
%%%%%%%%%%%%%%%%%%%% User Configuration Area %%%%%%%%%%%%%%%%%%%%
% define the map
map.height = 20;
map.width = 20;
map.center = [0, 0];
map.offset = map.center - [map.width, map.height]./2; % bottom-left corner
% starting vertex
origin = [1,2, 20*pi/180];
% define the obstacles using polygones, should be a cell stack of arrays.
poly = { [-4,-4; -1.5, -4; 0, -2.5; -0.5, -1; -3, 0],...
[0,3; 3,3; 3, 6; 4, 6; 1.5, 8; -1, 6; 0, 6] };
% RRT parameters
iteration = 1000;
th_range = 2*pi; % do not change without knowledge about Dubins
th_center = 0;
th_offset = 0;
% dubins parameters
turning_rad = 0.5;
exp = 0.2;
%%%%%%%%%%%%%%%%%%%% End of configuration area %%%%%%%%%%%%%%%%%%%%
% main program starts here
poly = poly_verify(poly, map);
if ~iscell(poly)
error("Ending due to incorrect obsticle polygon setting");
return;
end
% prelocation of data
edges.x = zeros(iteration,2);
edges.y = zeros(iteration,2);
edges.th = zeros(iteration,2);
edges.param(iteration).p_init = [0, 0, 0]; % the initial configuration
edges.param(iteration).seg_param = [0, 0, 0]; % the lengths of the three segments
edges.param(iteration).r = turning_rad; % model forward velocity / model angular velocity turning radius
edges.param(iteration).type = -1; % path type. one of LSL, LSR, ...
edges.param(iteration).flag = 0;
% initial conditions, DO NOT CHANGE
vertecies = origin;
vert_count = 1;
ind_nearest = zeros(iteration,1);
edge_count = 0;
% figure('name', 'RRT growing'); % originally for real-time animation
tic;
for i=1:iteration
% random point generation
x_rand = map.width*rand() + map.offset(1);
y_rand = map.height*rand() + map.offset(2);
th_rand = th_range*rand() + th_offset;
% check if (x,y) is available or not
if chk_xy_available([x_rand,y_rand], map, poly) == 0
continue;
end
% connect to nearest point
[ind_nearest(i),param_nearest] = dubins_searchn(vertecies, [x_rand, y_rand, th_rand], turning_rad);
% check availablility, see dubins_core.m for more info
if( param_nearest.flag < 0)
continue; % goto next loop, reset i doesn't work in MATLAB
elseif( chk_dubins_collision(param_nearest, map, poly, exp)==0 )
%%%%%%%%%%%%%%%%% edit line %%%%%%%%%%%%%%%%
% append the newly generated point and edge to the existing list
vertecies(vert_count+1,:) = [x_rand, y_rand, th_rand];
vert_count = vert_count + 1;
edges.x(edge_count+1,:) = [vertecies(ind_nearest(i),1), x_rand];
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]莫栋成,刘国栋.改进的快速探索随机树双足机器人路径规划算法[J].计算机应用,2013,33(01):199-201+206.
[2]邹启杰,刘世慧,张跃,侯英鹂.基于强化学习的快速探索随机树特殊环境中路径重规划算法[J].控制理论与应用,2020,37(08):1737-1748.
[3]李艳,郭继峰,罗汝斌.基于遗传算法与Dubins理论的高速无人系统在多障碍环境中的路径规划[J].无人系统技术,2021,4(06):37-45.DOI:10.19942/j.issn.2096-5915.2021.6.053.
[4]李寰宇,陈延龙,张振兴,刘夏锐.基于Dubins的无人机自动避撞路径规划[J].飞行力学,2020,38(05):44-49.DOI:10.13645/j.cnki.f.d.20200628.001.
[5]Steven M. LaValle "Rapidly-Exploring Random Trees: A New Tool for Path Planning" 1998, tech. rpt C.S.Dept, Iowa State U
[6]Sertac Karaman and Emilio Frazzoli "Sampling-based algorithms for optimal motion planning",2011, The International Journal of Robotics Research
[7]Yoshiaki Kuwata, Gaston A. Fiore, Justin Teo, Emilio Frazzoli, and Jonathan P. How, "Motion Planning for Urban Driving using RRT



















 912
912

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











