






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
裂纹检测与标记图片中的裂缝研究
一、裂纹检测的基本原理与技术方法
裂纹检测技术根据原理可分为传统物理检测和基于图像处理/深度学习的智能检测两大类。
1.1 传统物理检测方法
-
视觉检测
- 原理:通过肉眼或放大设备直接观察表面裂纹,适用于可见的宏观裂缝。
- 优点:操作简单、成本低。
- 缺点:依赖主观判断,无法检测微小或内部裂纹。
-
磁粉检测(MPI)
- 原理:利用磁场使铁磁材料表面裂纹吸附磁粉形成可见痕迹。
- 适用性:仅适用于铁磁材料,灵敏度高(表面及近表面裂纹)。
- 限制:非磁性材料无效,操作复杂。
-
渗透检测
- 原理:通过渗透液渗入裂纹,显像剂显示开口裂纹。
- 适用性:表面光滑的复杂工件。
- 缺点:对涂层表面效果差,渗透液可能有毒。
-
超声波检测
- 原理:高频声波在材料内部反射,分析回波判断裂纹位置和深度。
- 优势:可检测内部及深埋裂纹,适用于金属、复合材料等。
- 挑战:需专业设备和操作人员,表面需平整。
-
激光散斑检测
- 原理:利用激光干涉形成的散斑图案变化检测表面微变形。
- 优势:非接触式,灵敏度高(纳米级裂纹)。
- 缺点:设备成本高,操作复杂。
二、基于图像处理的裂纹检测算法
2.1 传统图像处理技术
-
预处理技术
- 滤波去噪:中值滤波、小波变换。
- 图像增强:脊波域增强、对比度拉伸。
-
边缘检测与分割
- 算子方法:Sobel、Canny、Roberts算子。
- 阈值分割:Otsu算法、自适应阈值。
- 形态学处理:膨胀、腐蚀连接断裂裂缝。
- 算子方法:Sobel、Canny、Roberts算子。
-
参数计算
- 骨架化:八邻域细化算法提取单像素骨架。
- 长度/宽度计算:基于像素统计或曲线拟合。
局限性:易受光照、噪声干扰,对复杂背景(如水迹、划痕)鲁棒性差。
2.2 基于深度学习的算法
-
主流模型架构
- 分类模型:ResNet、EfficientNet用于裂缝存在性判断。
- 目标检测:YOLO系列、Faster R-CNN定位裂缝区域。
- 语义分割:U-Net、DeepLab实现像素级提取。
-
创新技术
- 迁移学习:预训练模型(如ResNet50)微调,减少数据需求。
- 注意力机制:空间注意力提升特征聚焦能力。
- 多尺度融合:结合不同层次特征增强检测鲁棒性。
- 轻量化设计:EfficientNet优化计算效率,适配移动端。
-
性能对比
- 精度:改进U-Net的mPA达90.08%,Attention-ResNet50-GA模型F1分数0.9983。
- 速度:YOLOv5在无人机平台实现实时检测。
三、检测精度评估指标与标准
3.1 物理检测精度标准
- 裂缝宽度:估读精度±0.001 mm。
- 裂缝深度:误差≤±5%(深度<50 mm时误差±5 mm)。
- 声时测量:相对误差≤±1.0%。
3.2 算法性能指标
-
分类/检测指标
-
分割指标
- IoU(交并比) :
- mIoU:多类别IoU平均值。
- Kappa系数:衡量标注一致性。
- IoU(交并比) :
-
实际案例
- DeepCrack:F-measure达0.87。
- 1D-CNN-LSTM:测试集准确率99.25%。
四、挑战与未来方向
-
当前挑战
- 数据瓶颈:像素级标注数据集获取困难。
- 复杂环境:光照变化、背景噪声影响算法鲁棒性。
- 实时性:高分辨率图像处理速度不足。
-
未来趋势
- 多模态融合:结合红外、超声等传感器数据提升检测维度。
- 自监督学习:减少对标注数据的依赖。
- 边缘计算:轻量化模型部署于无人机、移动设备。
- 可解释性:突破“黑盒”限制,增强模型透明度。
五、结论
裂纹检测技术正从传统物理方法向智能化、自动化方向演进。深度学习(尤其是U-Net、YOLO等模型)显著提升了复杂环境下的检测精度,而开源工具与工业级系统(如无人机+深度学习)推动了实际应用。未来需在数据生成、模型轻量化及多模态融合方向持续突破,以实现更高效率、更低成本的裂缝健康监测。
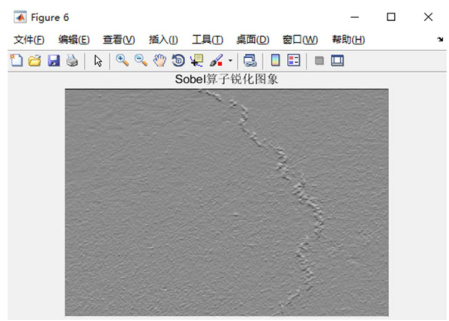
📚2 运行结果





主函数部分代码:
clear all
close all
% clf
I=imread('exemple2.PNG');
Indg=rgb2gray(I); %NdG
[l,c]=size(Indg); %Taille matrice Indg
%----Lissage------------
G = fspecial('gaussian',[5 5],3); %creation filtre gaussien
IG = imfilter(Indg,G,'symmetric','same','conv'); %filtrage gaussien
%--------------------------
%------------Calcul du gradient-----
%Matrices grad
IX=zeros(l,c);%grad horizon
IY=zeros(l,c);%grad vert
IXY=zeros(l,c);%norme grad
%Sobel 3x3
for i=2:l-1
for j=2:c-1
IX(i,j)=-(-double(IG(i-1,j-1))-2*double(IG(i,j-1))-double(IG(i+1,j-1))+double(IG(i-1,j+1))+2*double(IG(i,j+1))+double(IG(i+1,j+1)))/8;
IY(i,j)=-(-2*double(IG(i-1,j))+2*double(IG(i+1,j))-double(IG(i-1,j-1))+double(IG(i+1,j-1))-double(IG(i-1,j+1))+double(IG(i+1,j+1)))/8;
IXY(i,j)=sqrt(((IX(i,j))^2)+((IY(i,j))^2));
end
end
%-------Binarisation----
%Seuillage par hysteresis
Ibin=zeros(l,c);%binaire
Sh=8;
Sb=5;
for i=1:l
for j=1:c
if IXY(i,j)>=Sh %Seuil : gradient > Sh
Ibin(i,j)=255;
elseif IXY(i,j)<Sb %Seuil : gradient < Sb
Ibin(i,j)=0;
end
end
end
for p=1:50
for i=1:l
for j=1:c
if IXY(i,j)<Sh && IXY(i,j)>=Sb %Seuil : Sh > gradient > Sb
% Extraction des 8 pixels voisins
vect = [Ibin(i-1,j-1:j+1) Ibin(i, j-1) Ibin(i, j+1) Ibin(i+1,j-1:j+1)];
if max(vect)==255
Ibin(i,j)=255;
else
Ibin(i,j)=0;
end
end
end
end
end
%----------Identification des r間ions-----
[L,num]=bwlabel(Ibin,8);
t=regionprops(L, 'area'); %info sur les r間ions
taille=zeros(num,1);
for g=1:num
taille(g,1)=t(g,1).Area(1,1); %On extrait la taille des r間ions
end
%-----Effacement des petites r間ions------
Ifer=zeros(l,c);
for i=1:l
for j=1:c
for k=1
clear all
close all
% clf
I=imread('exemple2.PNG');
Indg=rgb2gray(I); %NdG
[l,c]=size(Indg); %Taille matrice Indg
%----Lissage------------
G = fspecial('gaussian',[5 5],3); %creation filtre gaussien
IG = imfilter(Indg,G,'symmetric','same','conv'); %filtrage gaussien
%--------------------------
%------------Calcul du gradient-----
%Matrices grad
IX=zeros(l,c);%grad horizon
IY=zeros(l,c);%grad vert
IXY=zeros(l,c);%norme grad
%Sobel 3x3
for i=2:l-1
for j=2:c-1
IX(i,j)=-(-double(IG(i-1,j-1))-2*double(IG(i,j-1))-double(IG(i+1,j-1))+double(IG(i-1,j+1))+2*double(IG(i,j+1))+double(IG(i+1,j+1)))/8;
IY(i,j)=-(-2*double(IG(i-1,j))+2*double(IG(i+1,j))-double(IG(i-1,j-1))+double(IG(i+1,j-1))-double(IG(i-1,j+1))+double(IG(i+1,j+1)))/8;
IXY(i,j)=sqrt(((IX(i,j))^2)+((IY(i,j))^2));
end
end
%-------Binarisation----
%Seuillage par hysteresis
Ibin=zeros(l,c);%binaire
Sh=8;
Sb=5;
for i=1:l
for j=1:c
if IXY(i,j)>=Sh %Seuil : gradient > Sh
Ibin(i,j)=255;
elseif IXY(i,j)<Sb %Seuil : gradient < Sb
Ibin(i,j)=0;
end
end
end
for p=1:50
for i=1:l
for j=1:c
if IXY(i,j)<Sh && IXY(i,j)>=Sb %Seuil : Sh > gradient > Sb
% Extraction des 8 pixels voisins
vect = [Ibin(i-1,j-1:j+1) Ibin(i, j-1) Ibin(i, j+1) Ibin(i+1,j-1:j+1)];
if max(vect)==255
Ibin(i,j)=255;
else
Ibin(i,j)=0;
end
end
end
end
end
%----------Identification des r間ions-----
[L,num]=bwlabel(Ibin,8);
t=regionprops(L, 'area'); %info sur les r間ions
taille=zeros(num,1);
for g=1:num
taille(g,1)=t(g,1).Area(1,1); %On extrait la taille des r間ions
end
%-----Effacement des petites r間ions------
Ifer=zeros(l,c);
for i=1:l
for j=1:c
for k=1
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
[1]郭怡,吴琼.可视化图像处理下船体表面微裂痕高效检测算法[J].舰船科学技术,2021,43(18):1-3.
🌈4 Matlab代码实现
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取




















 627
627

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











