






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
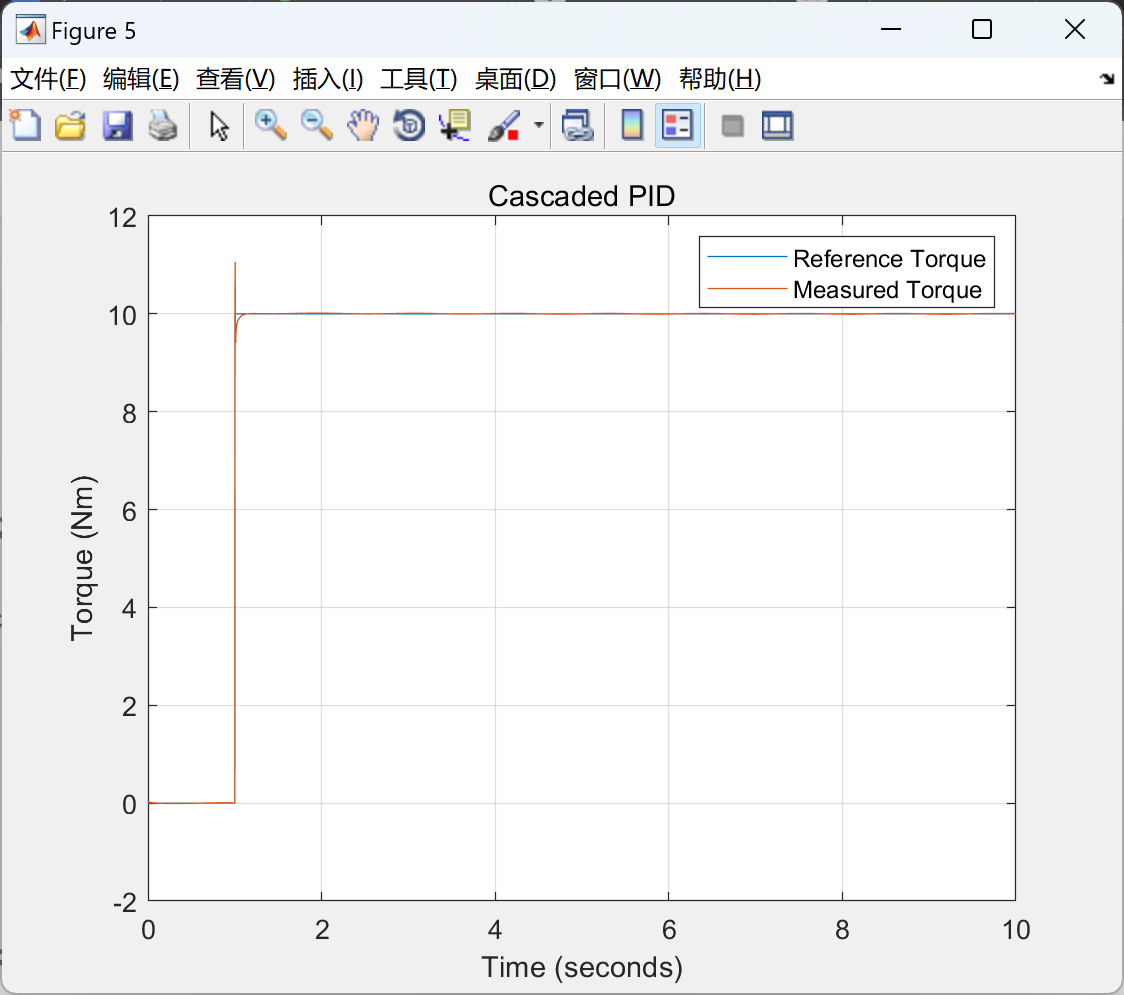
2.1 CascadedPID级联比例-积分-微分(控制器)
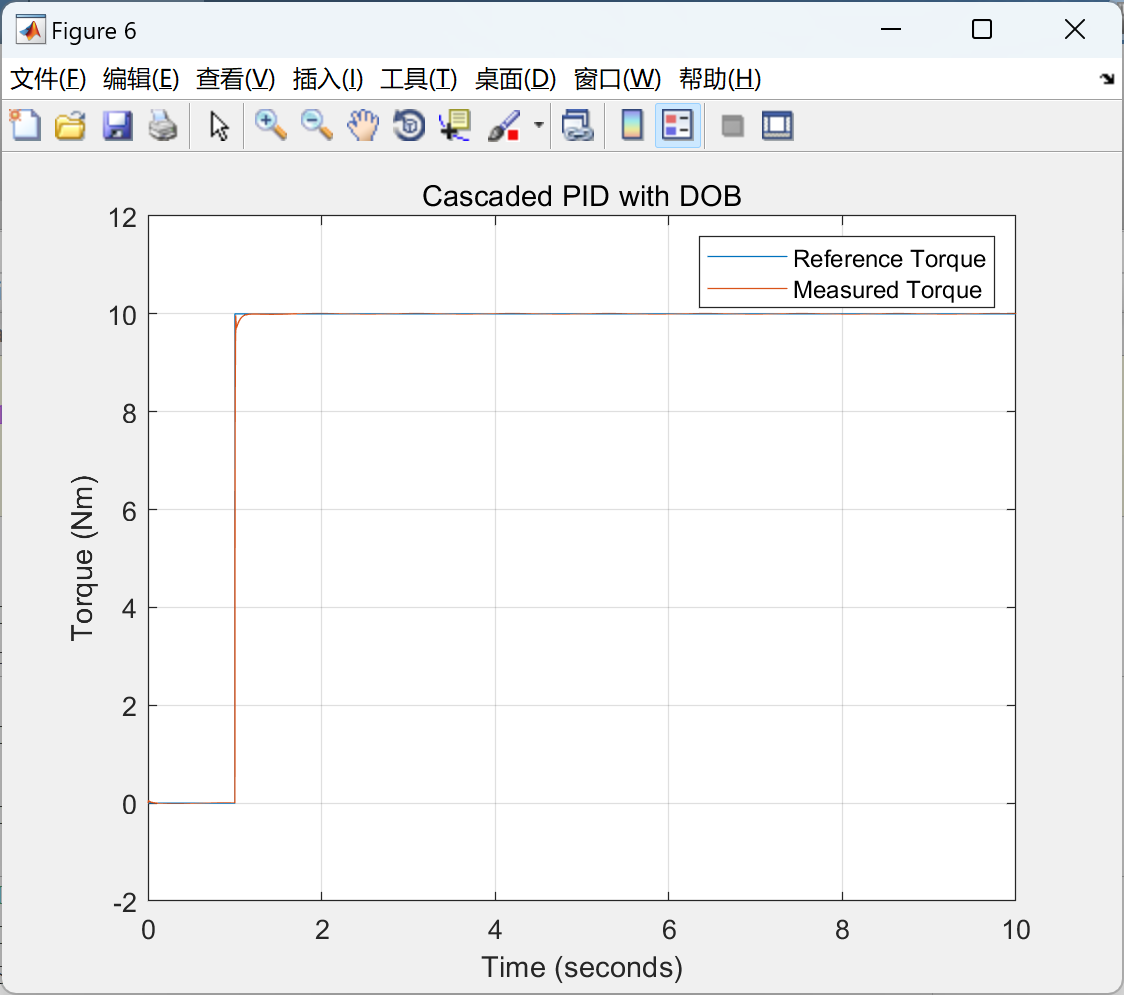
2.2 DoB带DoB的级联PIDCascaded PID wıth
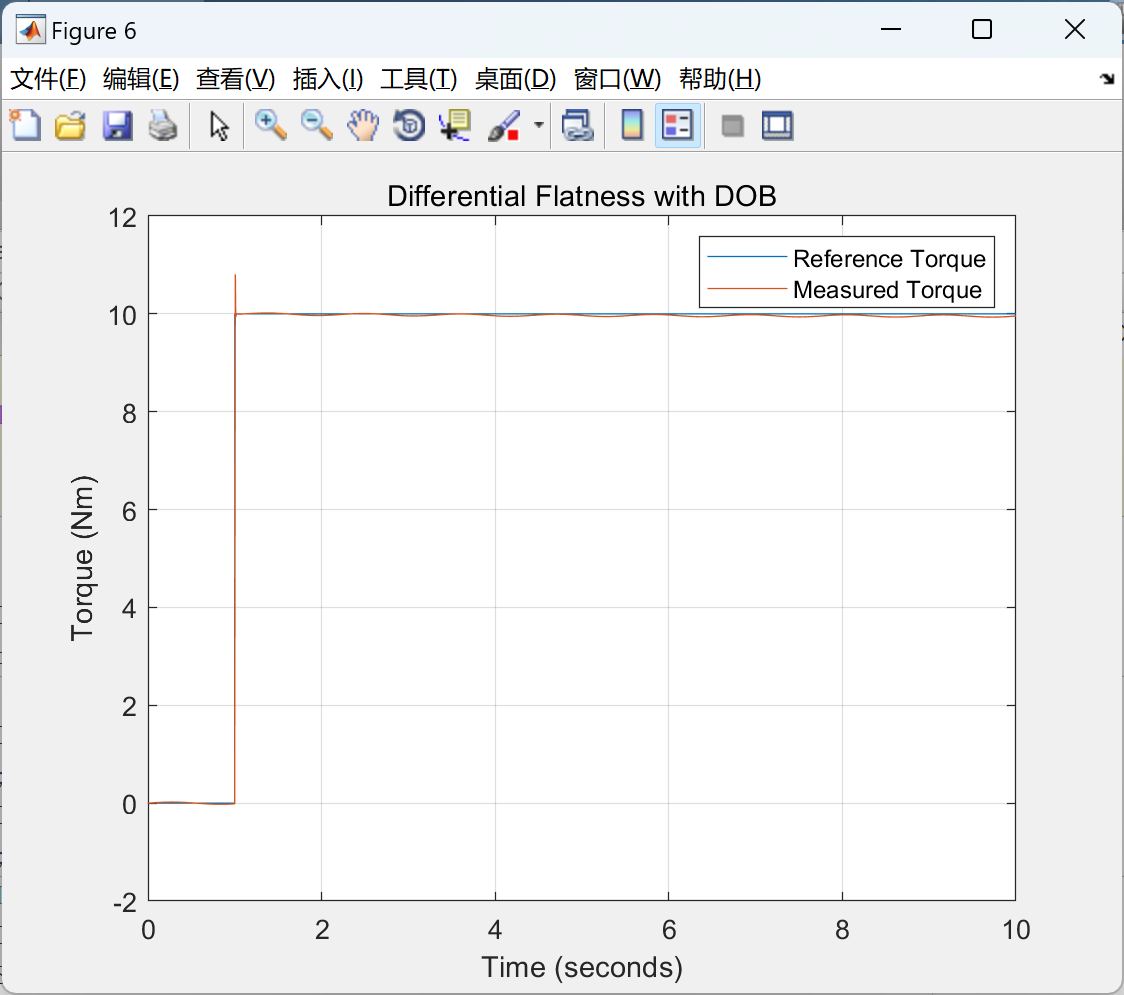
2.3 DoB差动平坦度控制Differential Flatness Control with DoB
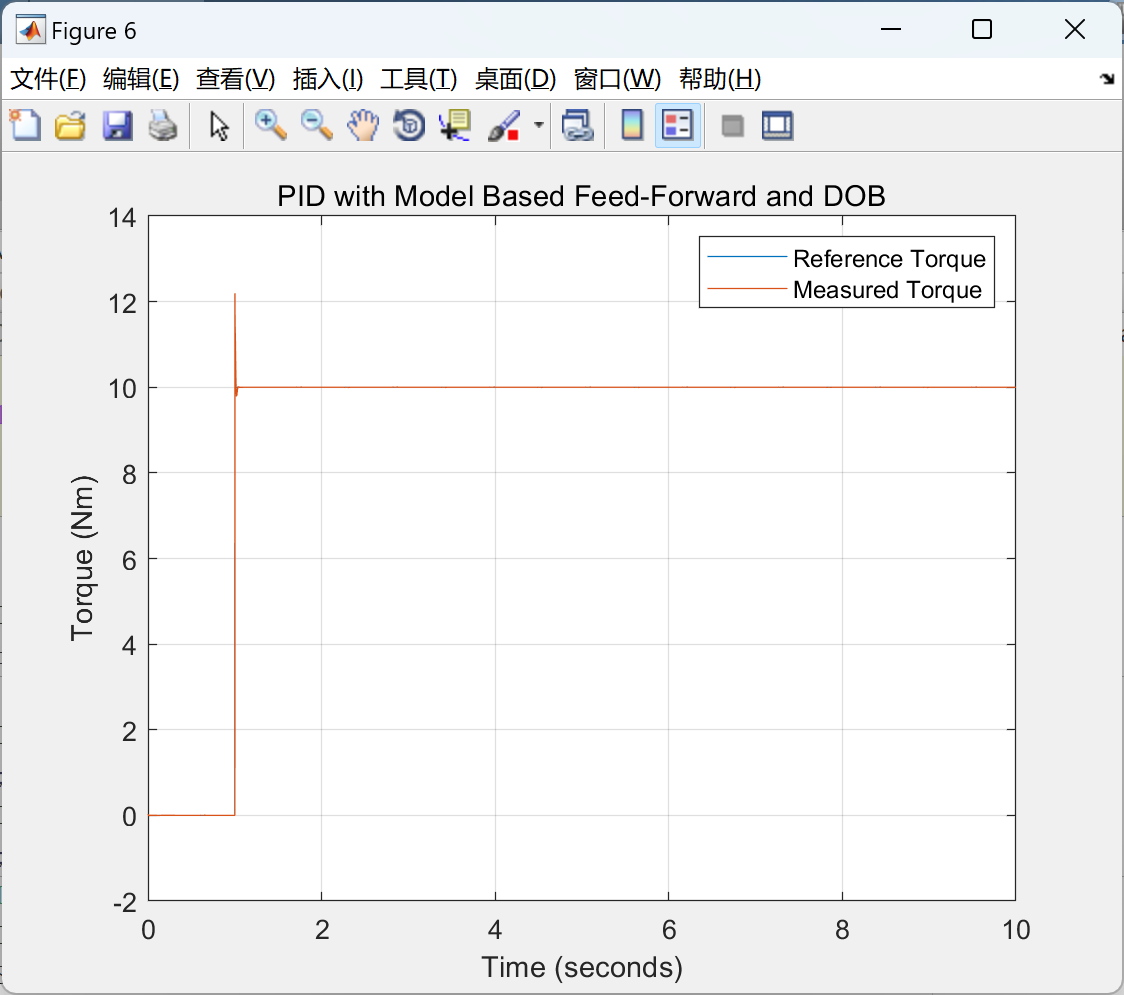
2.4 基于模型的前馈和DoB的PIDPID with Model Based Feed-Forward and DoB
2.5 带DoB的滑模控制器Sliding Mode Controller with DoB
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议粉丝按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能让人胸中升起一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
基于扭转的串联弹性致动器的基准扭矩控制策略
2.1 CascadedPID级联比例-积分-微分(控制器)
2.2 DoB带DoB的级联PIDCascaded PID wıth
2.3 DoB差动平坦度控制Differential Flatness Control with DoB
2.4 基于模型的前馈和DoB的PIDPID with Model Based Feed-Forward and DoB
2.5 带DoB的滑模控制器Sliding Mode Controller with DoB
摘要
在力矩控制执行器的多样性中,研究者得以应对众多物理人机交互应用,提高了安全性、可靠性和交互能力。然而,仅有少数力矩控制执行器能满足移动性、提高力矩/质量比及结构集成性等挑战性的应用需求。为此,串联弹性致动器(Series Elastic Actuator,SEA)应运而生,并在先进机器人平台中得到广泛应用。本文旨在研究基于扭转的SEA的基准扭矩控制策略,通过对比不同控制器的性能,评估其在力矩跟踪方面的优劣。
引言
力矩控制执行器的多样性使得研究者能够在增强安全、可靠性和交互能力的基础上,处理众多物理意义上的人机交互应用。然而,仅有少数力矩控制执行器能够满足移动性、提升力矩/质量比及结构集成性等严苛的应用需求。SEA由弹性元件(通常是弹簧)构成,部署在机械输出(负载)与电动机之间,可以归类为双惯性系统,其力矩控制问题相对更为复杂。
研究背景
早期的研究中,通常采用经典控制方法,例如比例-积分-微分(PID)控制来实现力矩跟踪。然而,力矩控制性能被认为不够理想,随后研究者增加了前馈(FF)项,以消除未建模动力学的影响。在此基础上,本文展示了一项实验性基准研究,评估了五种不同的控制器,这些控制器计算高效且能为基于扭转的SEA单元提供足够的力矩跟踪性能。
控制策略
本文对比了五种不同的控制器,并结合Disturbance Observer(DOB)来评估其在力矩跟踪方面的性能。这些控制器包括:
- PID控制器:传统的比例-积分-微分控制器。
- 滑模控制(SMC)+DOB:具有内在的干扰衰减能力,适用于参数不确定性和误差影响较大的系统。
- 其他控制器:包括基于优化的方法(如模型预测控制)等,但受限于计算成本和算法复杂性。
实验设置
实验主要在一个带有硬弹簧(91 Nm/deg)的扭转SEA单元上进行。为了提供另一种视角,还在带有相对较软弹簧(29.5 N/cm)的棱柱形SEA单元上进行了相同的一组实验。结果得到了类似的定性跟踪性能,表明所评估的控制器可能适用于广泛范围的SEA。
实验结果
实验结果表明,所有五个控制器在性能指标方面没有显著差异,但滑模控制(SMC)+DOB在力矩跟踪方面与其他控制器相比显得相对更有利。考虑到SEA建模易受参数不确定性和误差影响的事实,基于滑模的控制器表现出色,因为它具有内在的干扰衰减能力。此外,DOB增强了SEA的力矩控制性能,消除了由于模型不确定性和控制器结构(如抖振)引起的干扰。
仿真分析
为了验证控制方法的有效性,对SEA驱动器进行了仿真分析。仿真结果验证了所设计的控制方法对SEA力控具有良好的跟随性,能够实现机器人与人、环境之间的安全物理交互。特别是,模型预测控制在解决SEA的力矩跟踪问题上表现出优越性能,但受限于计算成本和算法复杂性。
结论
综上所述,基于扭转的串联弹性致动器的基准扭矩控制策略研究表明,滑模控制(SMC)+DOB在力矩跟踪方面表现出色,具有内在的干扰衰减能力和简单的结构,适用于参数不确定性和误差影响较大的系统。此外,DOB作为实现精细跟踪的力矩控制器的一个不可或缺部分,增强了SEA的力矩控制性能。未来研究可以进一步探索基于优化的方法(如模型预测控制)在实时实施中的可行性,以提高SEA的力矩控制性能。
📚2 运行结果
2.1 CascadedPID级联比例-积分-微分(控制器)
2.2 DoB带DoB的级联PIDCascaded PID wıth
2.3 DoB差动平坦度控制Differential Flatness Control with DoB
2.4 基于模型的前馈和DoB的PIDPID with Model Based Feed-Forward and DoB
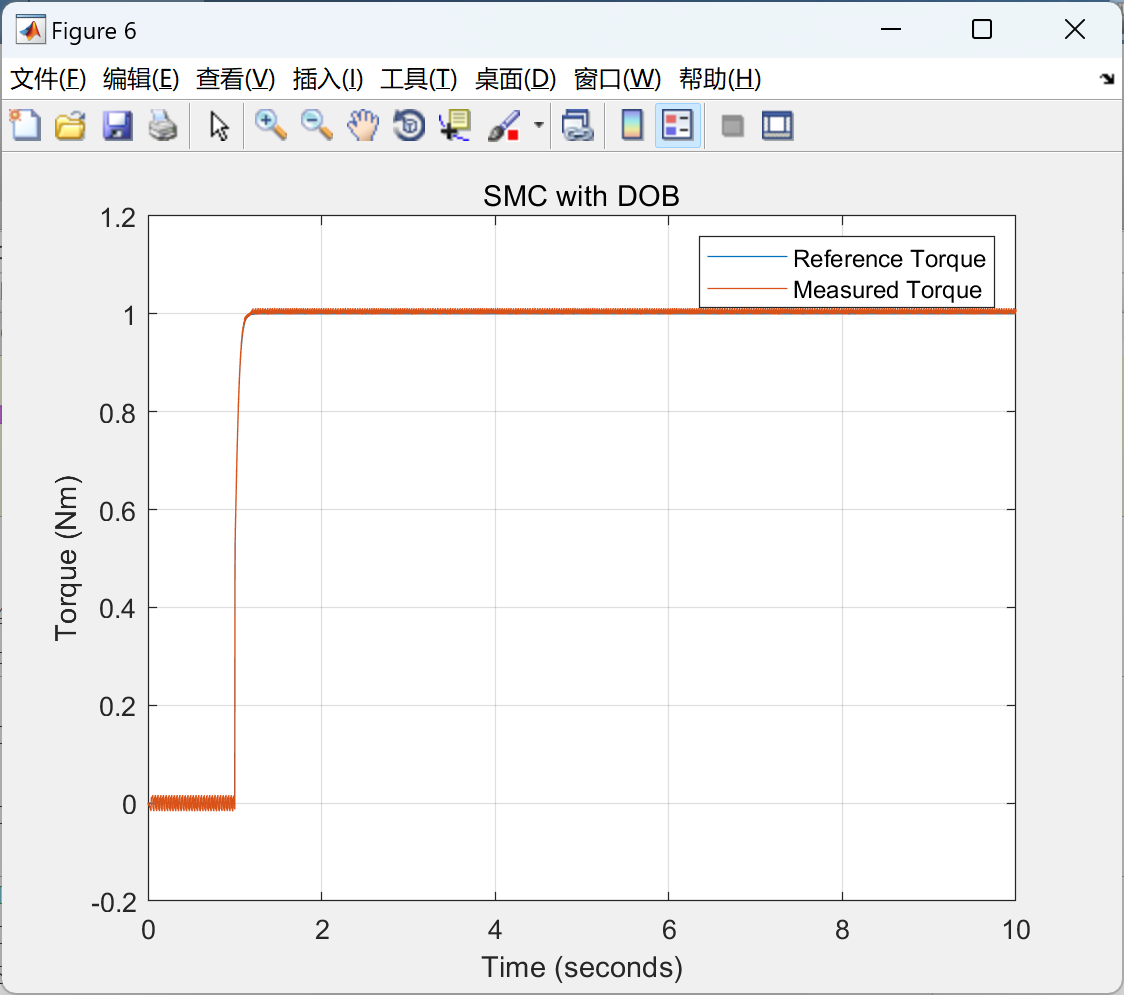
2.5 带DoB的滑模控制器Sliding Mode Controller with DoB
部分代码:
%% Simulation Parameters
Ts = 10; % Simulation Time
dt = 1e-4; % Simulation Time Step
nS = Ts/dt + 1; % Number of Iterations
%% Initial Conditions
Qm0 = 0.0; % Initial rotor position
dQm0 = 0.0; % Initial rotor velocity
Ql0 = 0.0; % Initial link position
dQl0 = 0.0; % Initial link velocity
%% SEA Model Parameters
Ks = 5000; % Spring Stifness
Jm = 2.781e-04; % Rotor Inertia
Jl = 0.07; % Link Inertia
Bm = 1.5e-03; % Motor Damping
Bl = 0.2; % Link Damping
Benv = 200; % Environment Damping
Kenv = 5000; % Environment Stifness
N = 100; % Gear Ratio
%% Controller Parameters
gdob = 1500; % DoB Low Pass Filter Frequency
c = 2000; % Convergence rate
p = 100; % SMC gain
TauMax = 10;
%% Mathematical Parameters used in SEA Model
mu1 = N^2*(2*Jm + Bm*dt);
mu2 = 1/dt^2 + (Benv+Bl)/(2*Jl*dt);
%% Simulation Loop
for i=1:nS
t(i) = (i-1)*dt; % Time vector
%% SEA Model
if i>2
Qm(i) = Qm(i-1)*(4*Jm*N^2 - 2*Ks*dt^2)/mu1 ...
- Qm(i-2)*(-Bm*N^2*dt + 2*Jm*N^2)/mu1 ...
+ Ql(i-1)*2*Ks*dt^2*N/mu1 - dm(i-1)*(2*N*dt^2)/mu1 ...
+ TauM(i-1)*(2*N^2*dt^2)/mu1;
Ql(i) = -Ql(i-2)*(1/dt^2 - (Benv+Bl)/(2*Jl*dt))/mu2 ...
+ Ql(i-1)*(2/dt^2 -(Kenv+Ks)/Jl)/mu2 ...
+ Qm(i-1)*Ks/(Jl*N*mu2) - dl(i-1)/(Jl*mu2);
dQm(i) = (Qm(i) - Qm(i-1)) / (dt);
dQl(i) = (Ql(i) - Ql(i-1)) / (dt);
elseif i>1.5 && i<2.5 % i=1
Qm(i) = dQm0*dt + Qm(i-1);
Ql(i) = dQl0*dt + Ql(i-1);
dQm(i) = dQm0;
dQl(i) = dQl0;
else % i=0
Qm(i) = Qm0;
Ql(i) = Ql0;
dQm(i) = dQm0;
dQl(i) = dQl0;
end
% Motor side (dm) and Link side (dl) disturbances
dm(i) = DistMotor(t(i), dQm(i));
dl(i) = DistLink(t(i));
%% Controller
Ref(:,i) = InputTl(t(i)); % Reference Input
TauS(i) = Ks*(Qm(i)/N - Ql(i)); % Measured Torque
% Sliding Mode Controller
Tau_m(i) = SMC(Ref(3,i), Ref(2,i), Ref(1,i), [Qm(i); Ql(i); dQm(i); dQl(i)], c, p);
% Disturbance Observer (DoB)
k1(i) = Tau_m(i) + Jm*gdob*dQm(i);
if i>1
Fk1(i) = FuncLowPass(k1(i-1), Fk1(i-1), gdob, dt);
else
Fk1(i) = 0;
end
Tau_dob(i) = Jm*gdob*dQm(i) - Fk1(i); % DoB out (Estimated Disturbance)
% Disturbance Observer (DoB)
TauM(i) = Tau_m(i)*Jm*N - Tau_dob(i)*Jm; % Command Torque
end
%% Plots
%% Motor Position
%figure(1)
%plot(t, Qm)
%grid on
%title("Motor Position")
%xlabel("Time (seconds)")
%ylabel("Position (rad)")
%saveas(gcf, '../results/SMC_motor_pos.png')
%% Link Position
%figure(2)
%plot(t, Ql)
%grid on
%title("Link Position")
%xlabel("Time (seconds)")
%ylabel("Position (rad)")
%saveas(gcf, '../results/SMC_link_pos.png')
%% Motor Velocity
%figure(3)
%plot(t, dQm)
%grid on
%title("Motor Velocity")
%xlabel("Time (seconds)")
%ylabel("Velocity (rad/s)")
%% Link Velocity
%figure(4)
%plot(t, dQl)
%grid on
%title("Link Velocity")
%xlabel("Time (seconds)")
%ylabel("Velocity (rad/s)")
figure(6)
plot(t, Ref(1,:), t, TauS);
grid on
title("SMC with DOB")
xlabel("Time (seconds)")
ylabel("Torque (Nm)")
legend("Reference Torque", "Measured Torque")
function ref = InputTl(t)
%A0 = 1;
%A = 1;
%w = 1;
%Tref = A0 + A*sin(w*t);
%dTref = A*w*cos(w*t);
%ddTref = -A*w*w*sin(w*t);
%ref = [Tref; dTref; ddTref];
% Instead of a step, a sigmoid function is given
ConRate = 35; % Convergence rate of the sigmoid function
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
[1]陶帅,白鸿柏,顾伟.复合作动器复合方式对平台主动隔振影响分析[J].振动与冲击, 2011, 30(8):5.
[2]陈铭宏.纤维增强型的模块化软体机器人的建模仿真与实验研究[D].苏州大学,2020.
🌈4 Matlab代码实现
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取




















 3801
3801

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











