







连续PID和离散PID与C语言实现的PID的区别
连续PID公式:
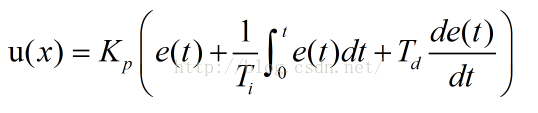
离散PID公式:
离散化的目标是为了把连续性问题转化成计算机能够处理的离散性问题。
处理方法:对连续PID公式用矩形法数值积分近似代替积分,用一阶后向差分近似代替微分,最后可以得到离散的 PID 表达式为:

离散和模拟形式PID对比

C语言实现PID控制
对离散PID处理:
比例系数:Kp,
积分系数:KpT/Ti,可以用Ki表示;
微分系数:KpTd/T,可以用Kd表示;
则公式可以写成如下形式:

总结:
都是使用一些近似的方法,把PID进行一些处理,使之能够在计算机上实现pid算法,但这样处理,势必会出现一些偏差。也因为这样处理,PID的控制周期要严格恒定,比如用定时器进行控制。
额外
在一些控制系统中,通过一些传感器可以获得某些值,出现一些PID的变体。通过传感器,直接能够得到角度值的微分,也就是角速度,不需要进行用一阶后向差分近似代替微分。比例系数:Kp,微分系数:Kp*Td/T,可以用Kd表示;这个处理是没有变化的。
这样处理的好处是:减少一阶向后差分近视代替微分带来的偏差。
缺点在于,这个传入的角速度必须要经过一些处理,比如滤波,使角速度的值更接近真实值,这样会增加处理器的负荷。
比如角度PID
/**************************************************************************
函数功能:角度PID
入口参数:倾角角度、角速度
返回 值:平衡控制用PWM
**************************************************************************/
int Balance_Ctrl_Pwm(float Ang,float Gyro)
{
float Bias=Ang-QingJiaoZhongZhi; //中值,求出平衡的角度中值 和机械相关
int balance;
float kp = 42, kd = - 26;
balance= -(int)(kpBias+Gyrokd); //计算平衡控制的电机PWM PD控制 kp是P系数 kd是D系数
return balance;
}















 199
199











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









