







第一节:内容回顾
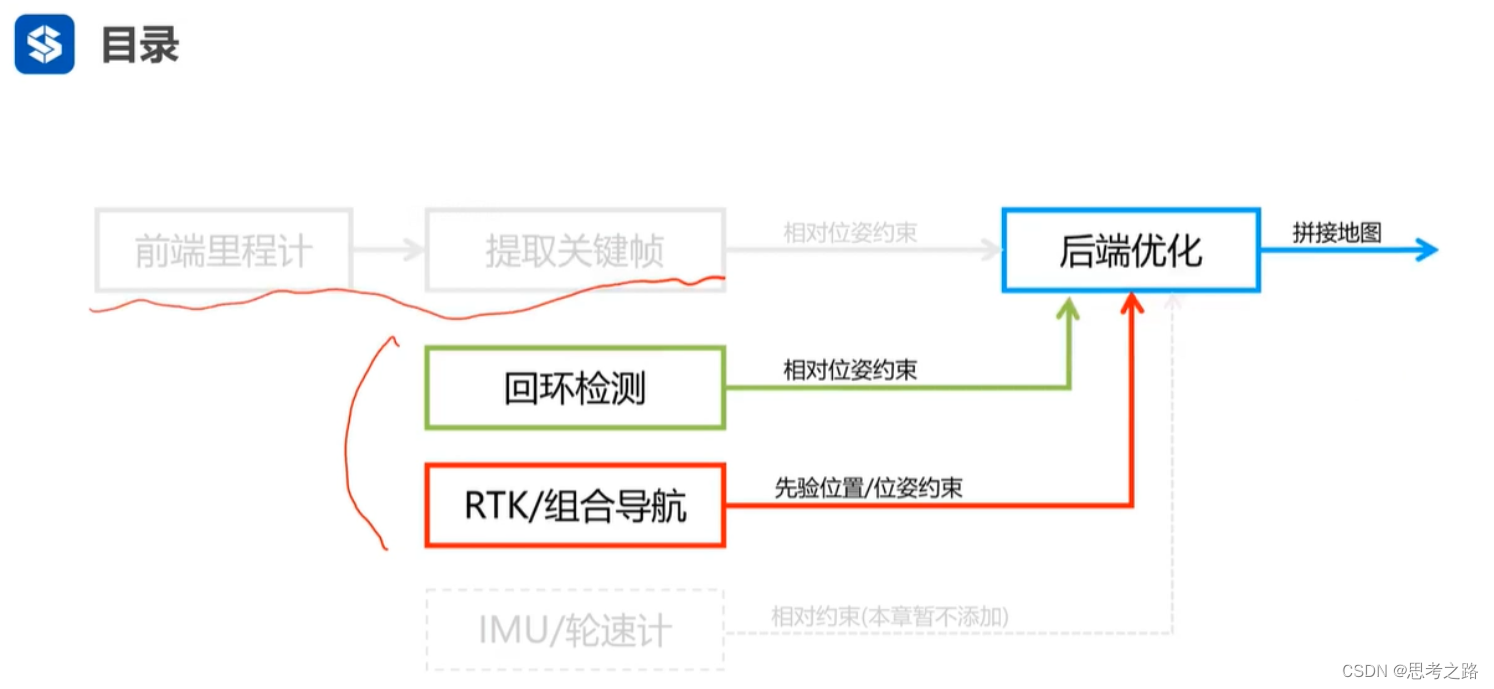
RTK/组合导航的作用是为了消除重影。
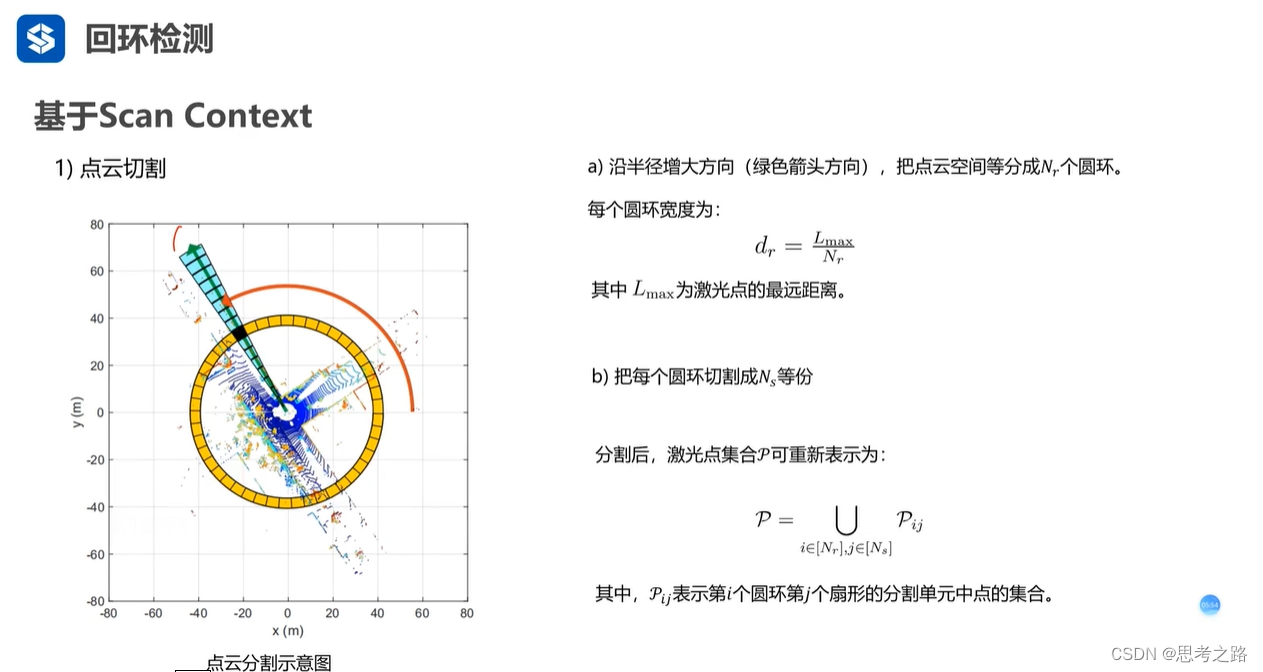
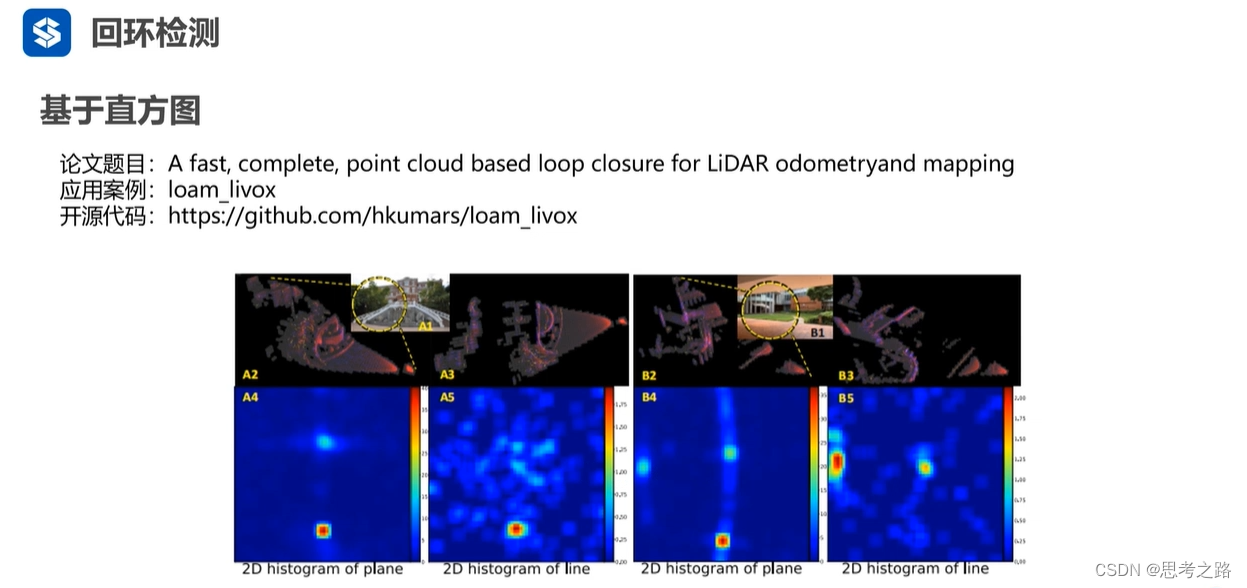
匹配的策略:线或者面
第二节:回环检测及代码实现
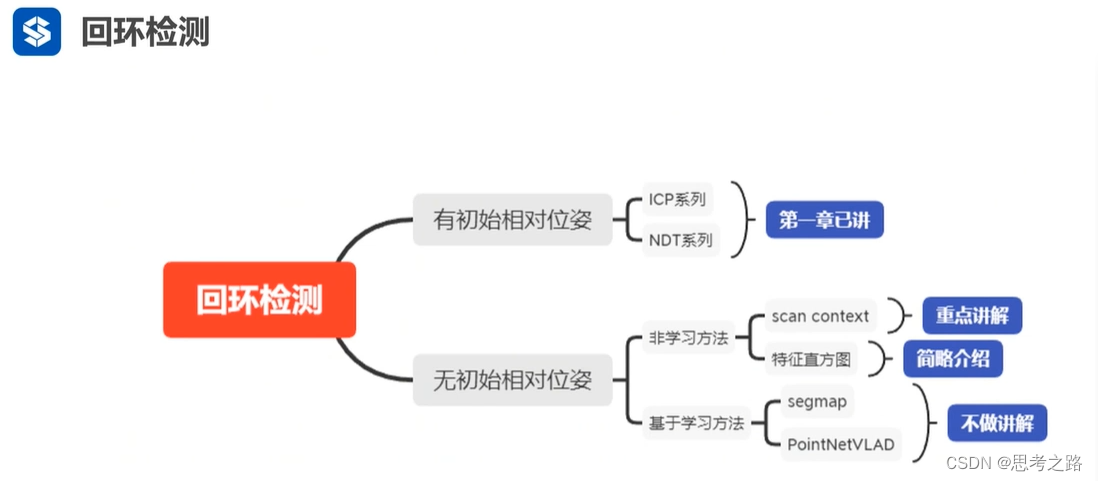
具有初始位姿的回环检测使用与回环的路程比较小,例如500米,累积误差比较小,使用当前帧与历史帧的相对位姿做匹配。
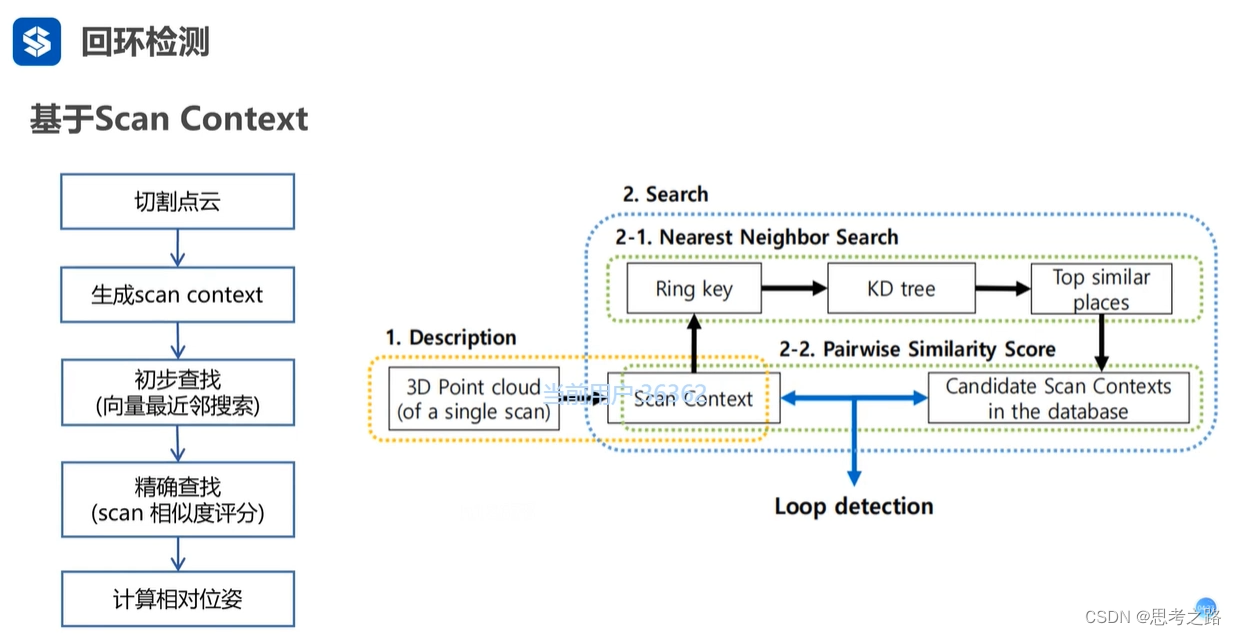
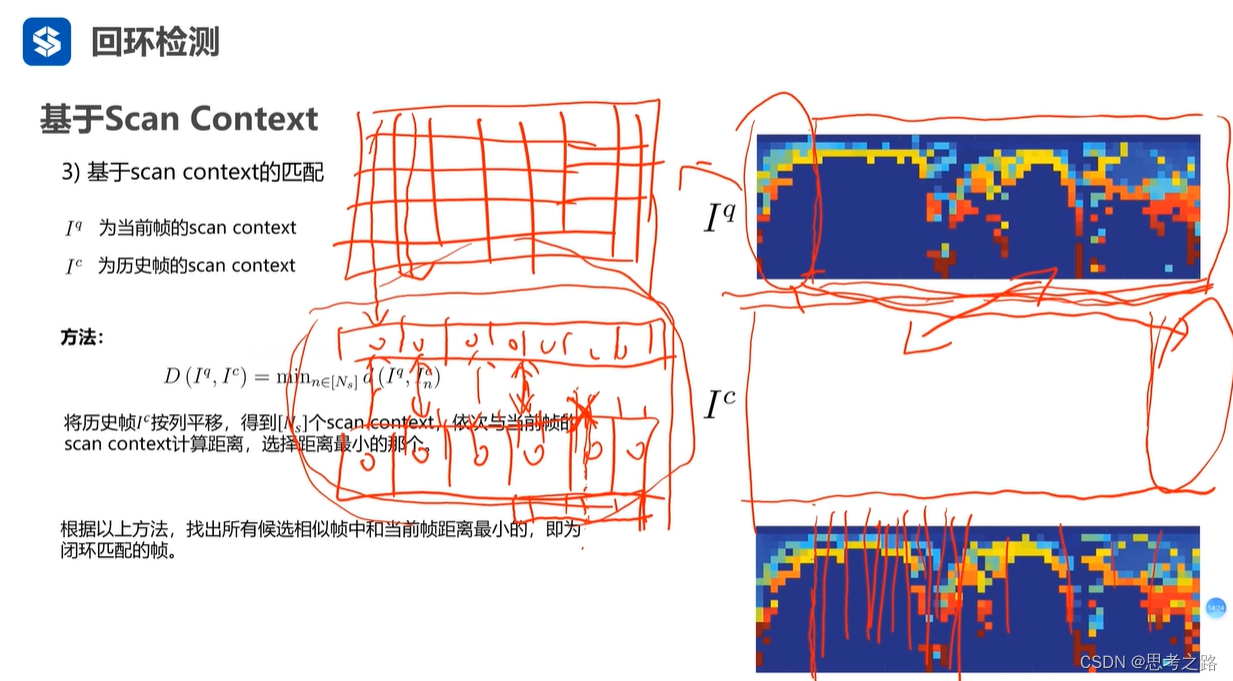
在实现下述回环检测的情况下,我们提出了两个严格的条件:激光雷达通过同一地方并且车头的方向也是一致的,然后一列一列进行匹配。
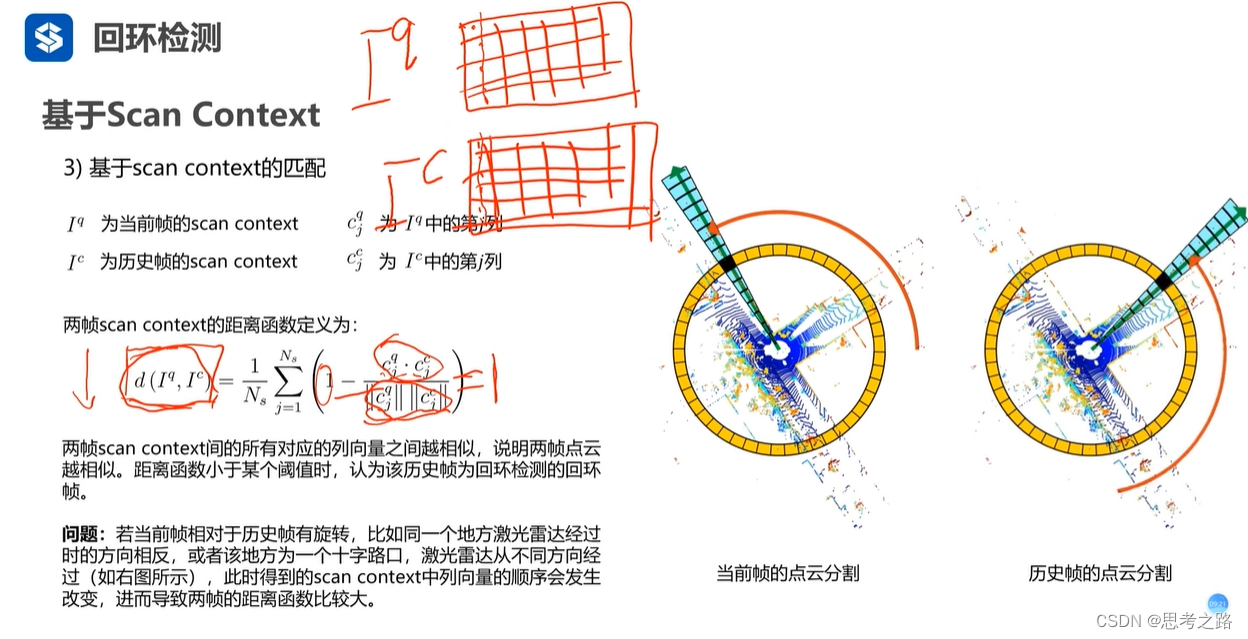
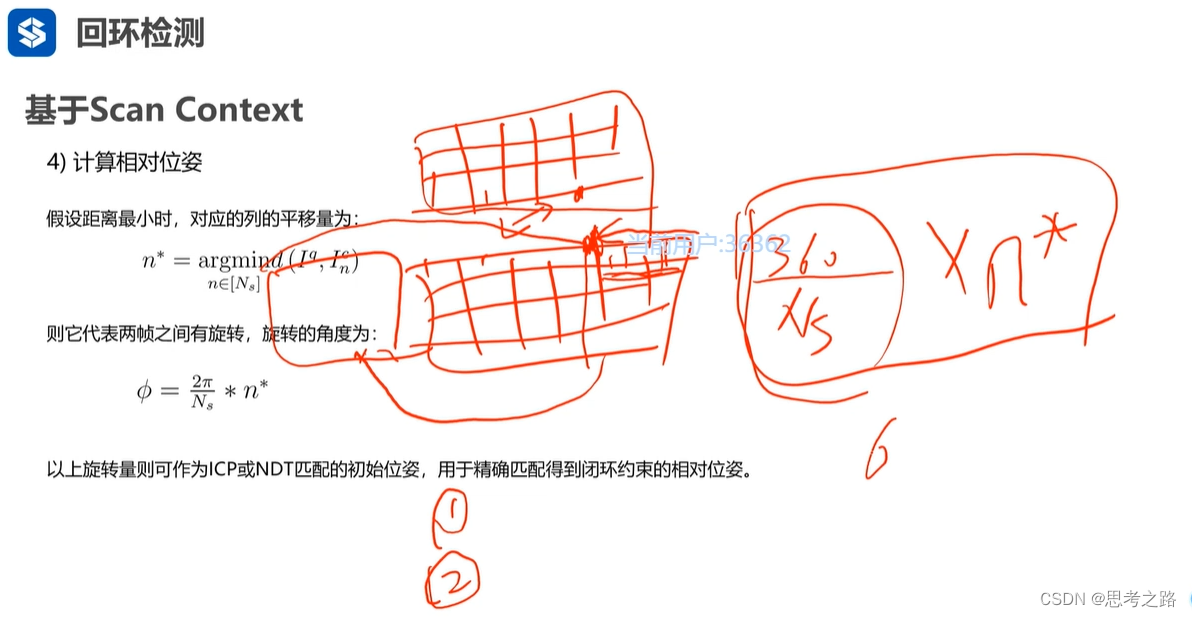
下图是车在同一位置,但是在不同的朝向上得到的地图,由纯旋转导致的,为了提高相似度,我们需要对第一个图进行切割,但是切割的位置如何确定?
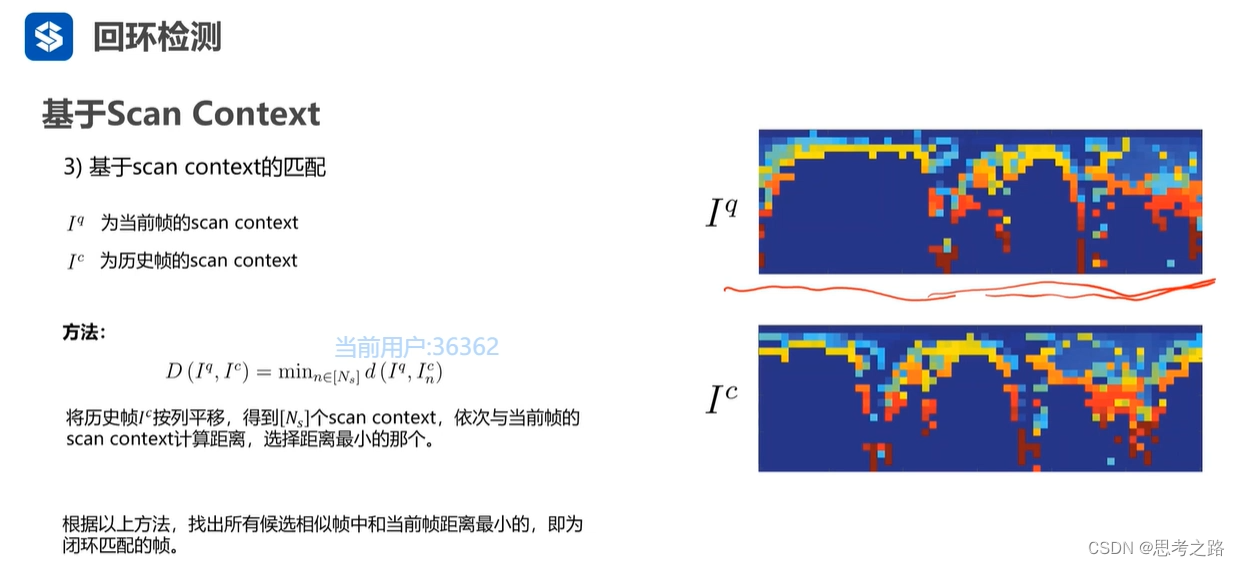
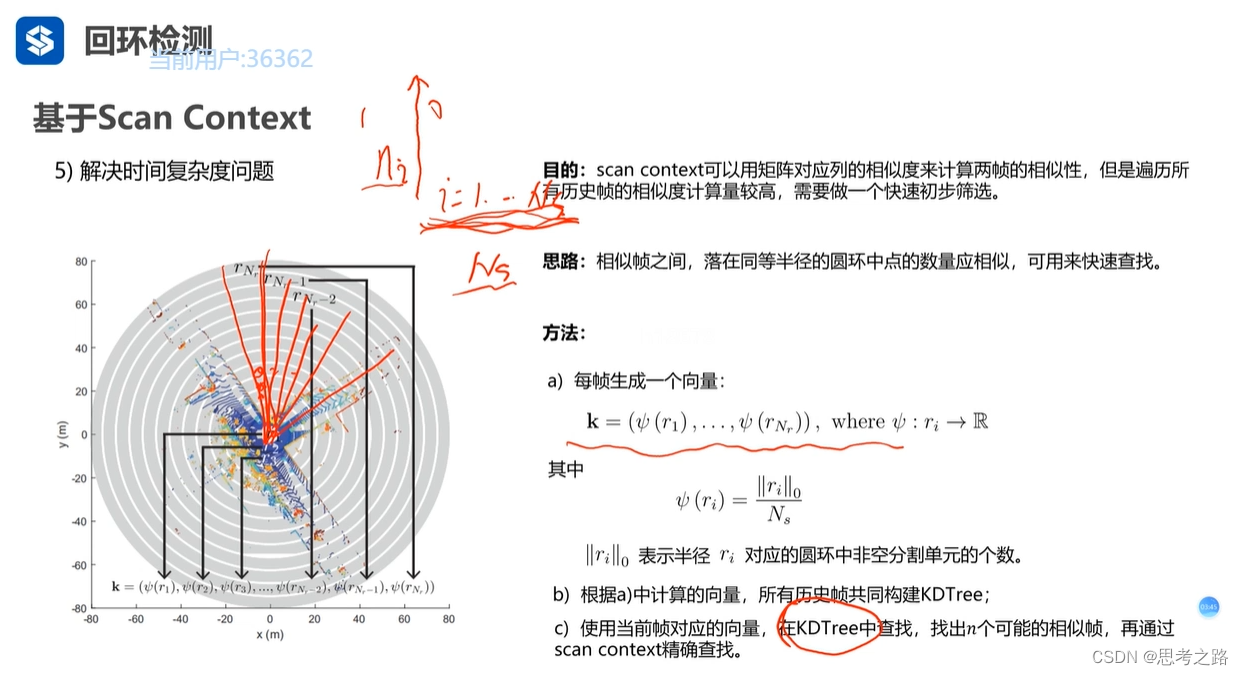
Iq图对应的是一个二维的东西,我们需要将每一个列进行合并,此时进行Iq和Ic进行匹配的时候,只需要比较对应的数值,同时维度也降低了,对信息将维,会失去准确性,此时我们就需要在切割点的周围寻找更合适的切割点,又需要在切割后的小范围内进行高纬度的切割,进而达到减少计算量的同时提高准确性。

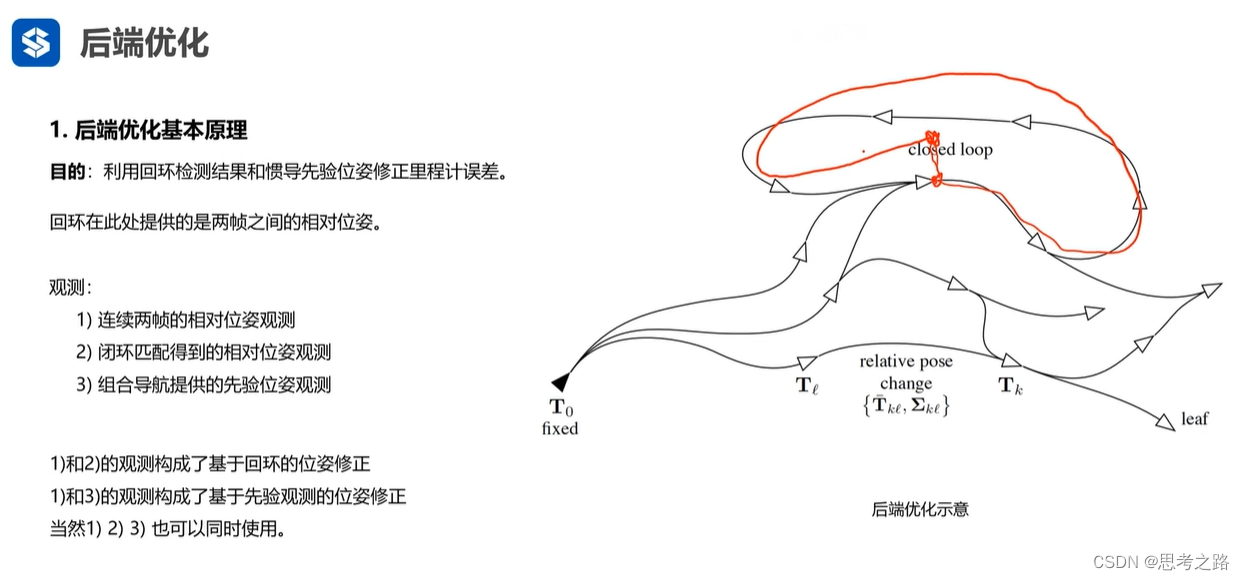
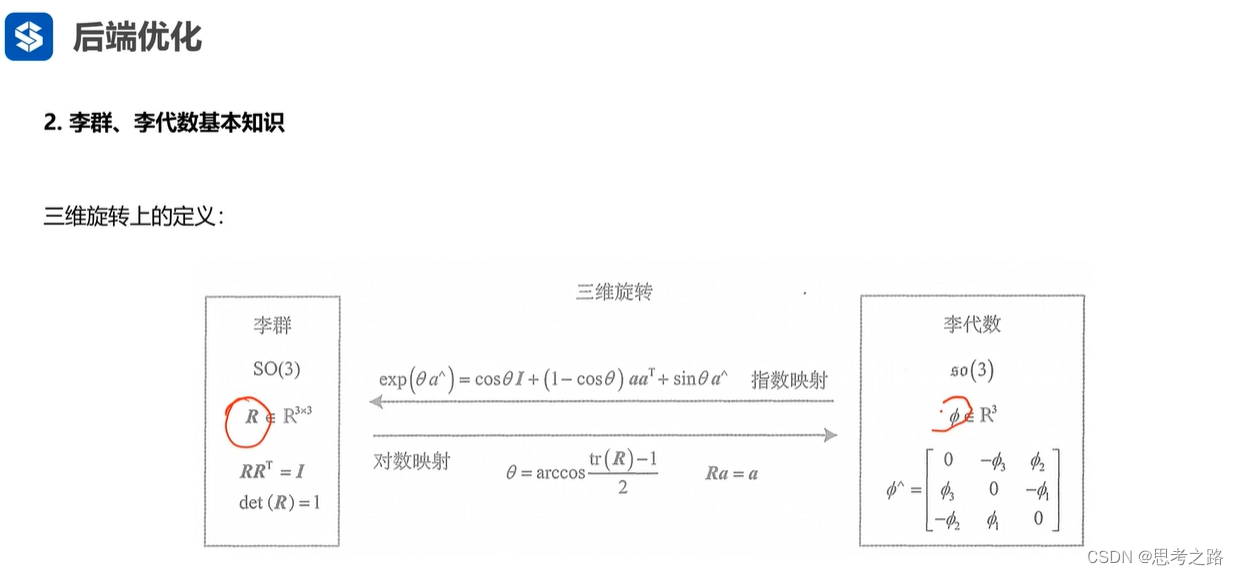
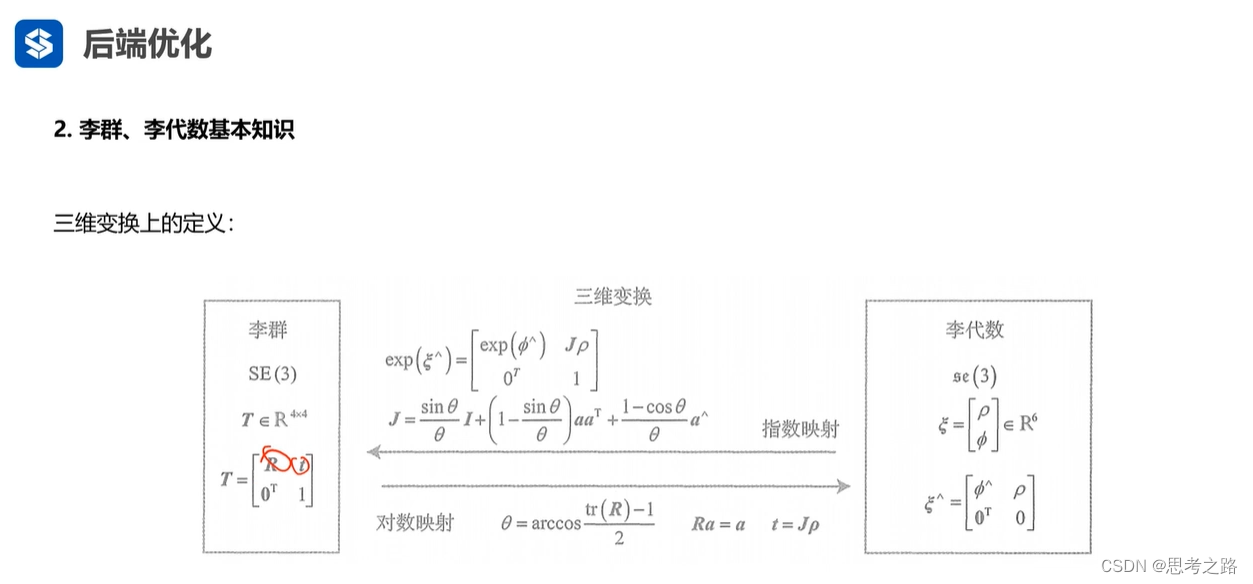
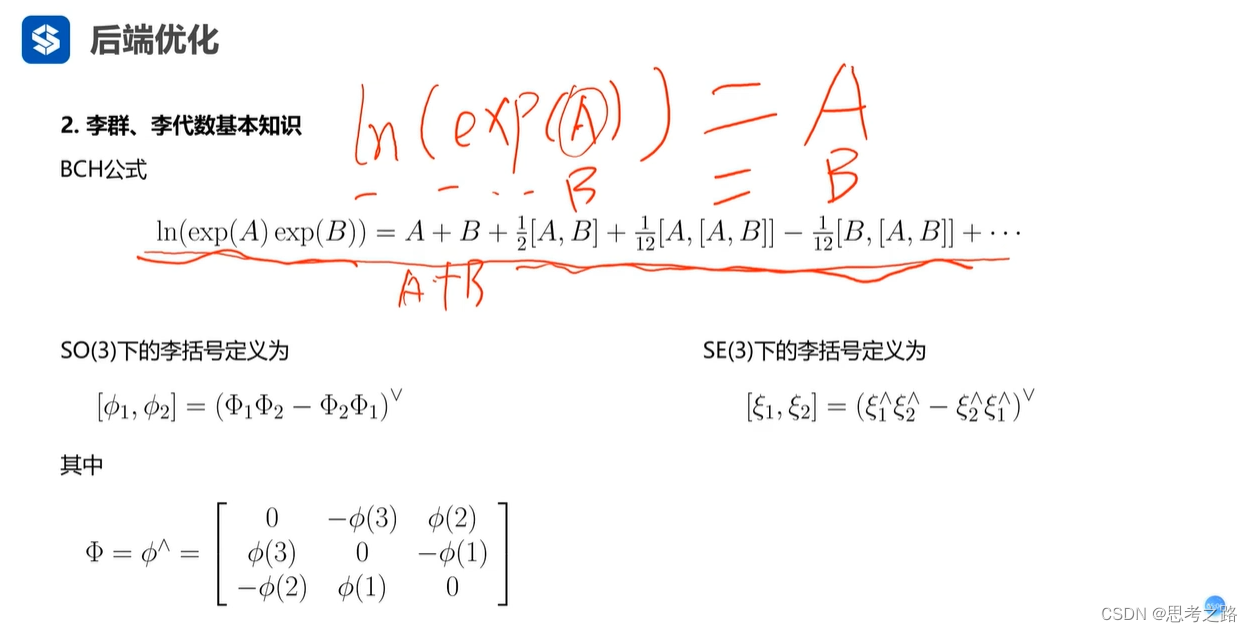
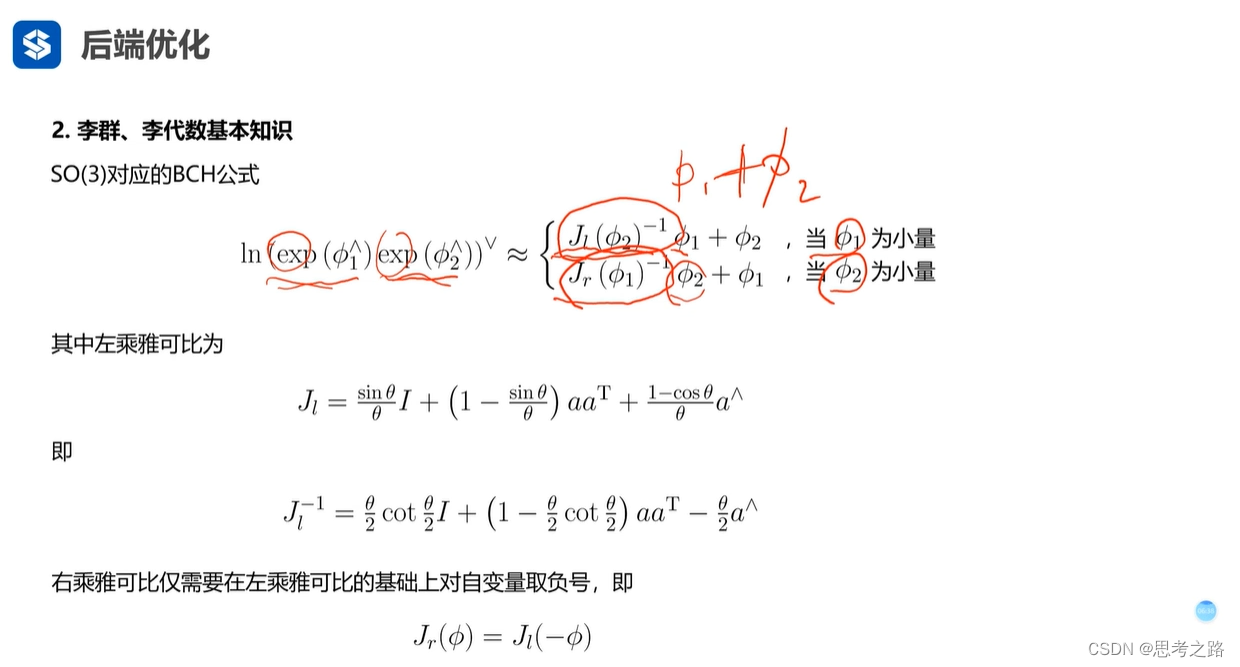
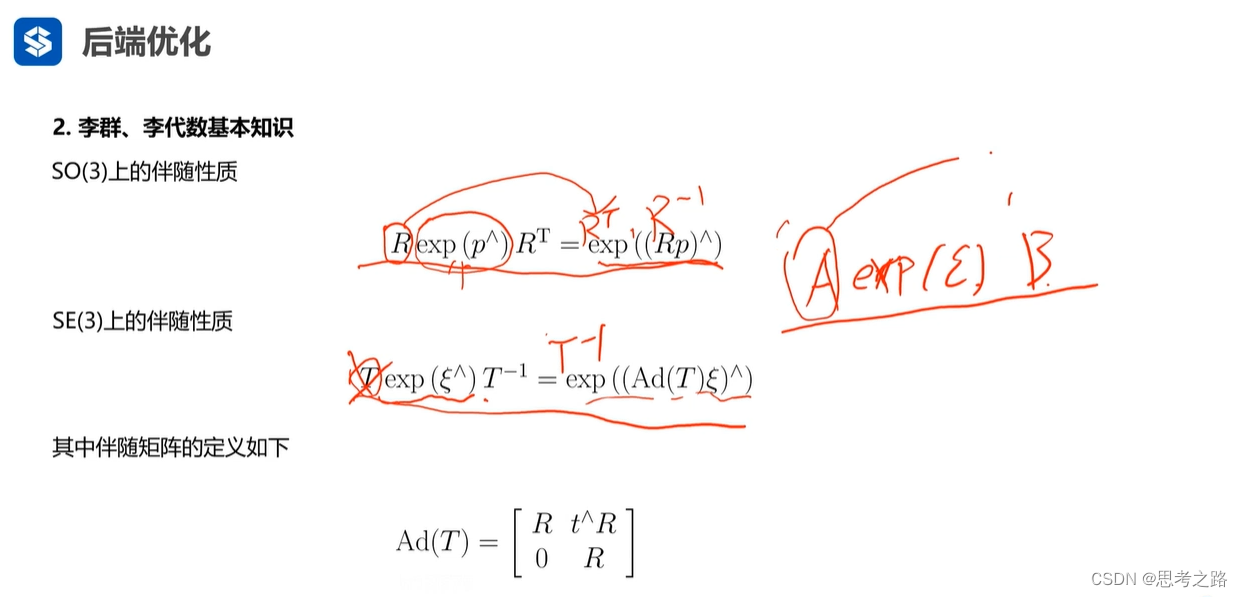
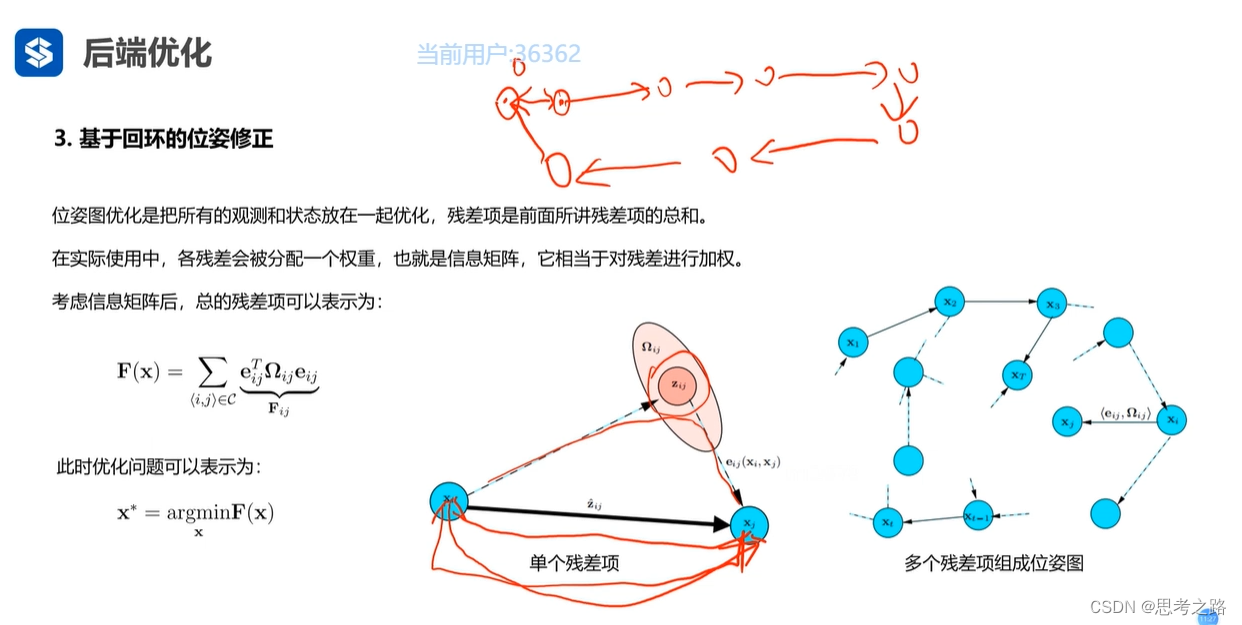
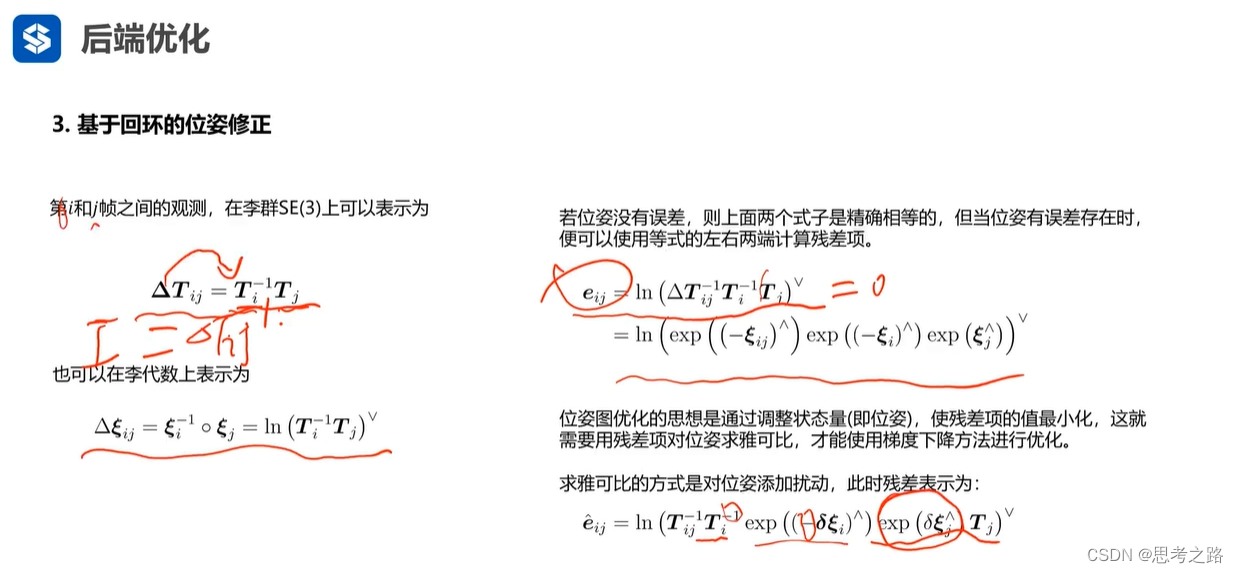
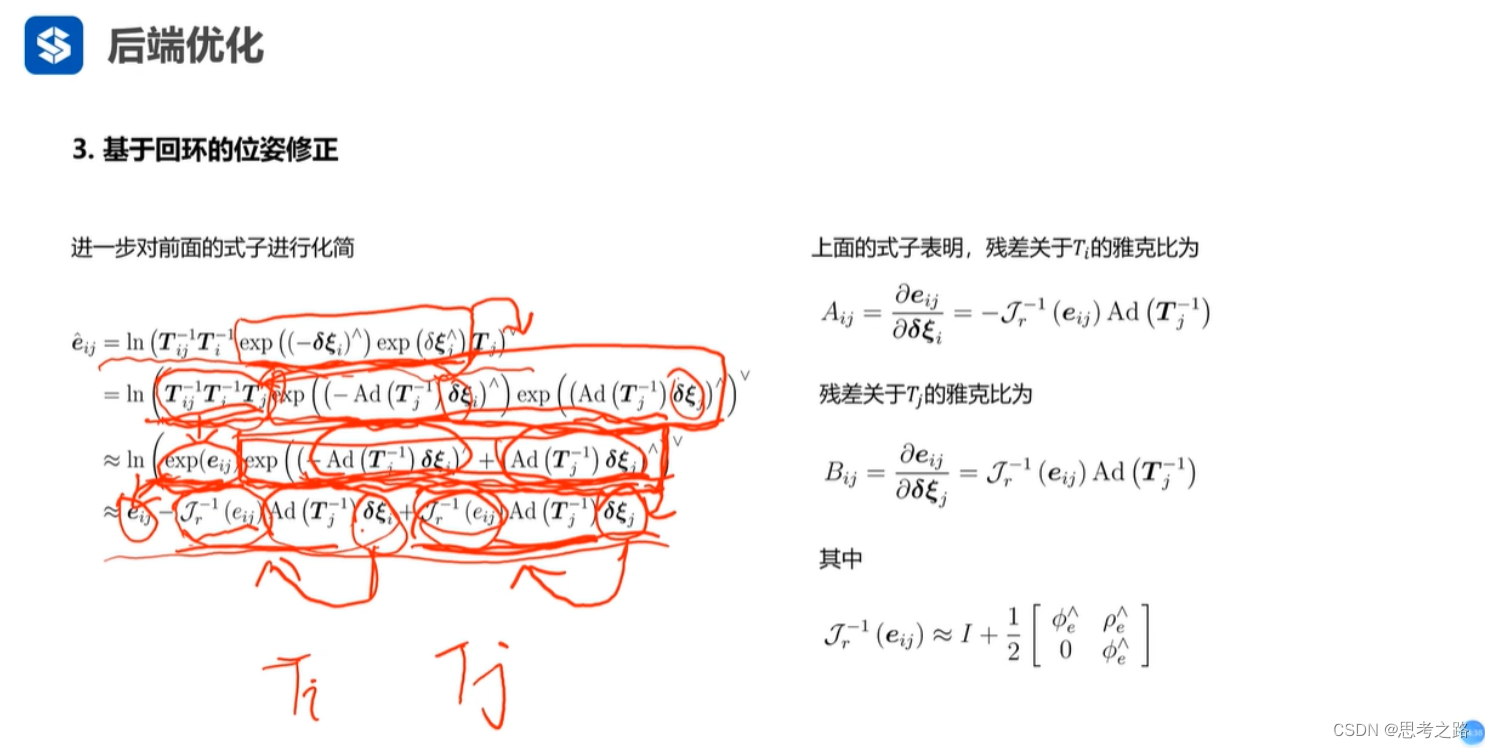
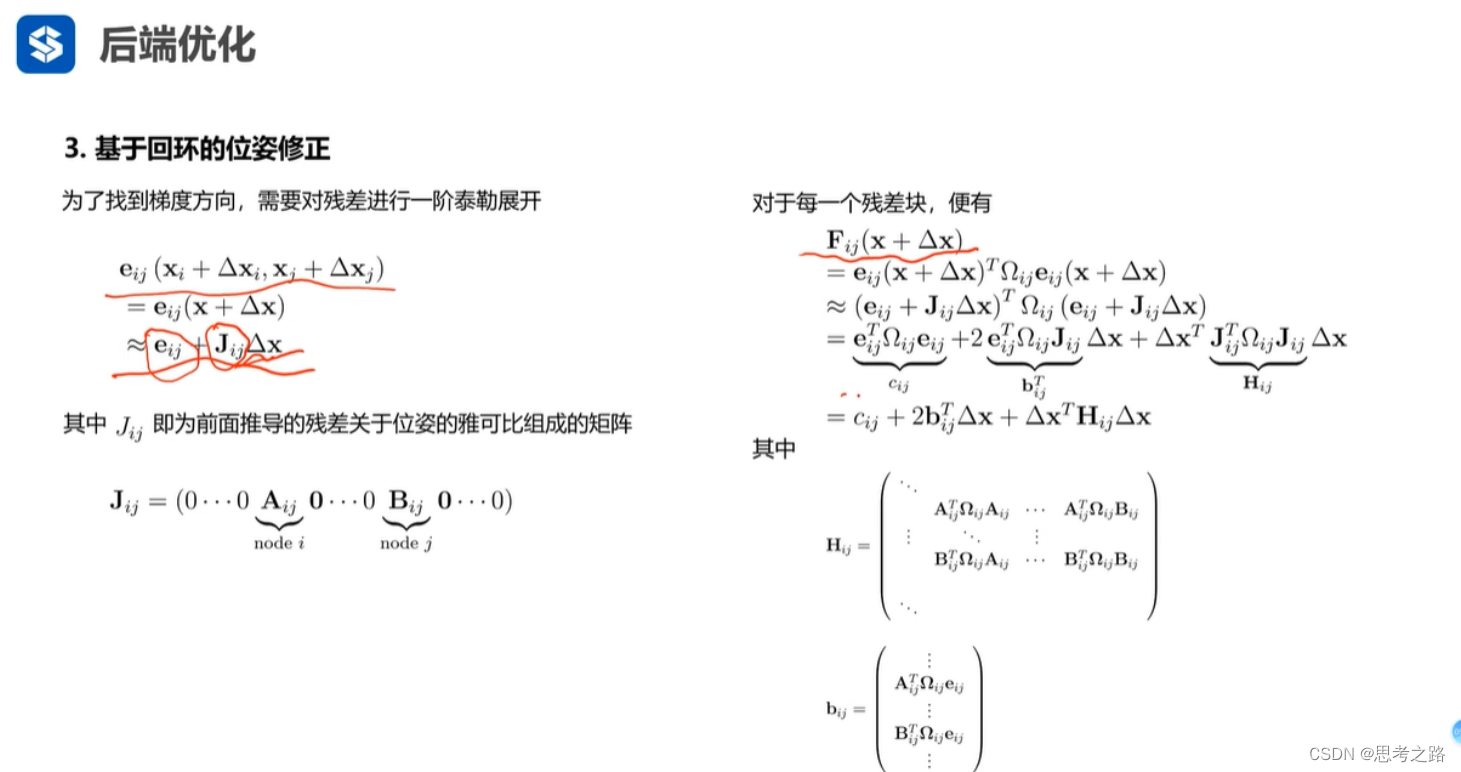
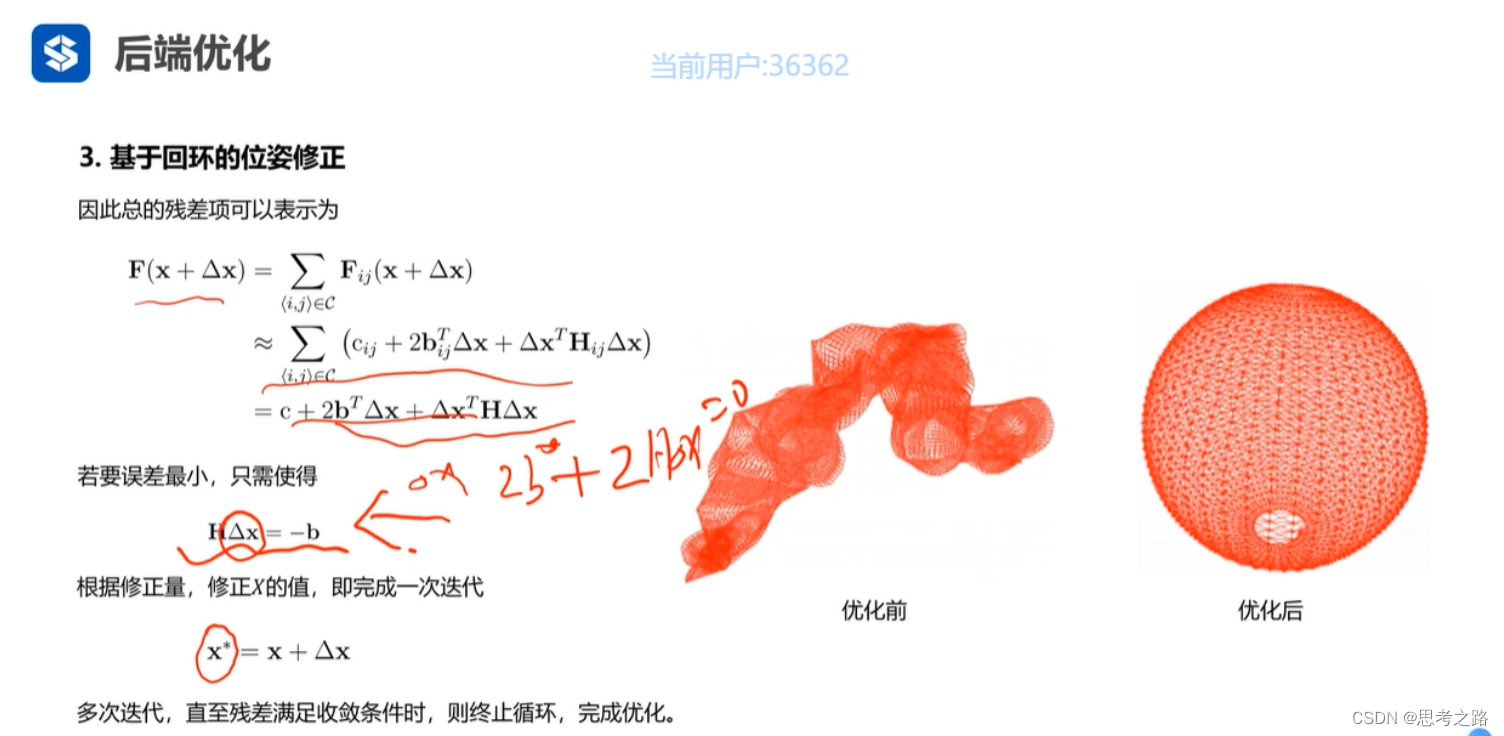
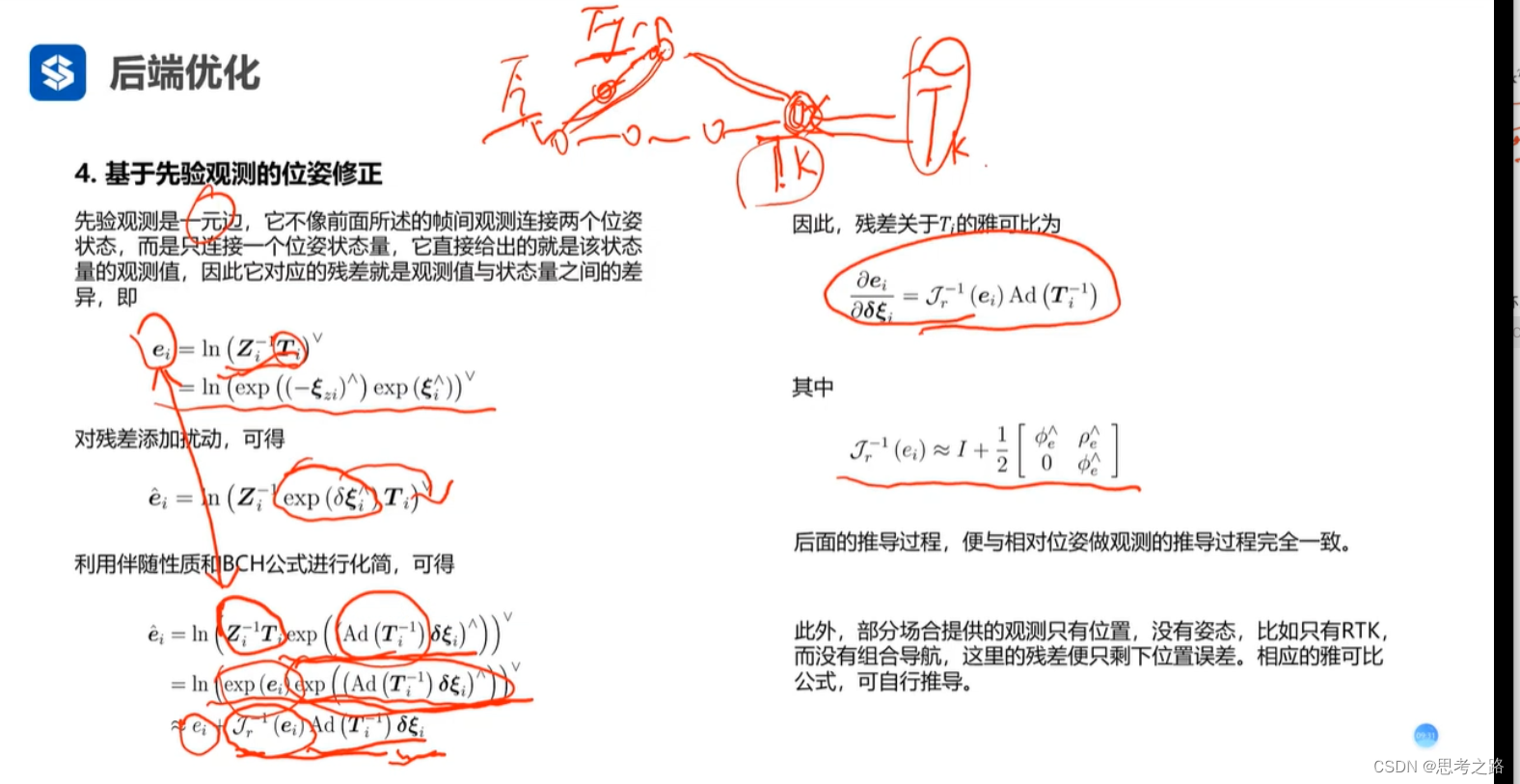
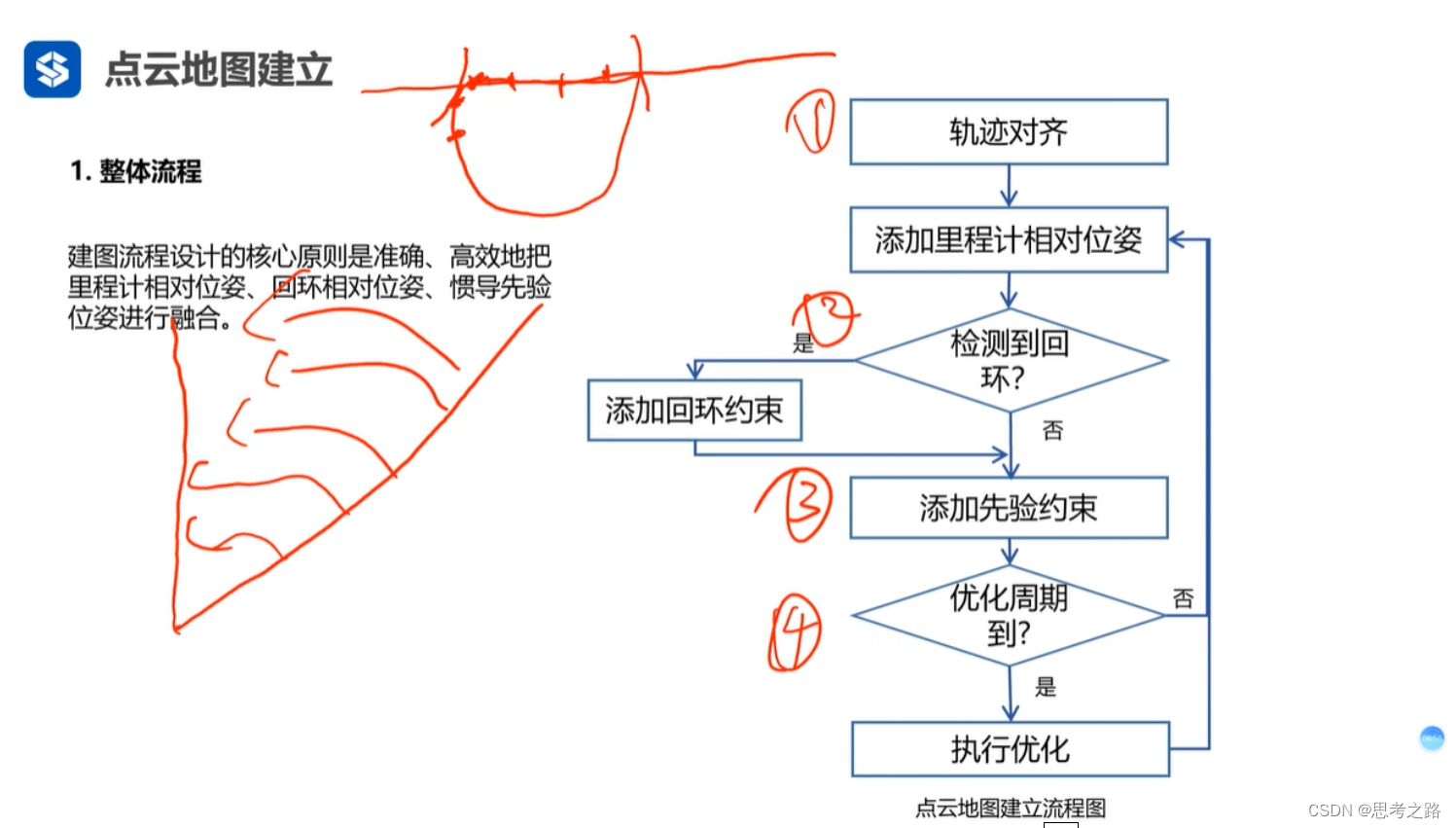
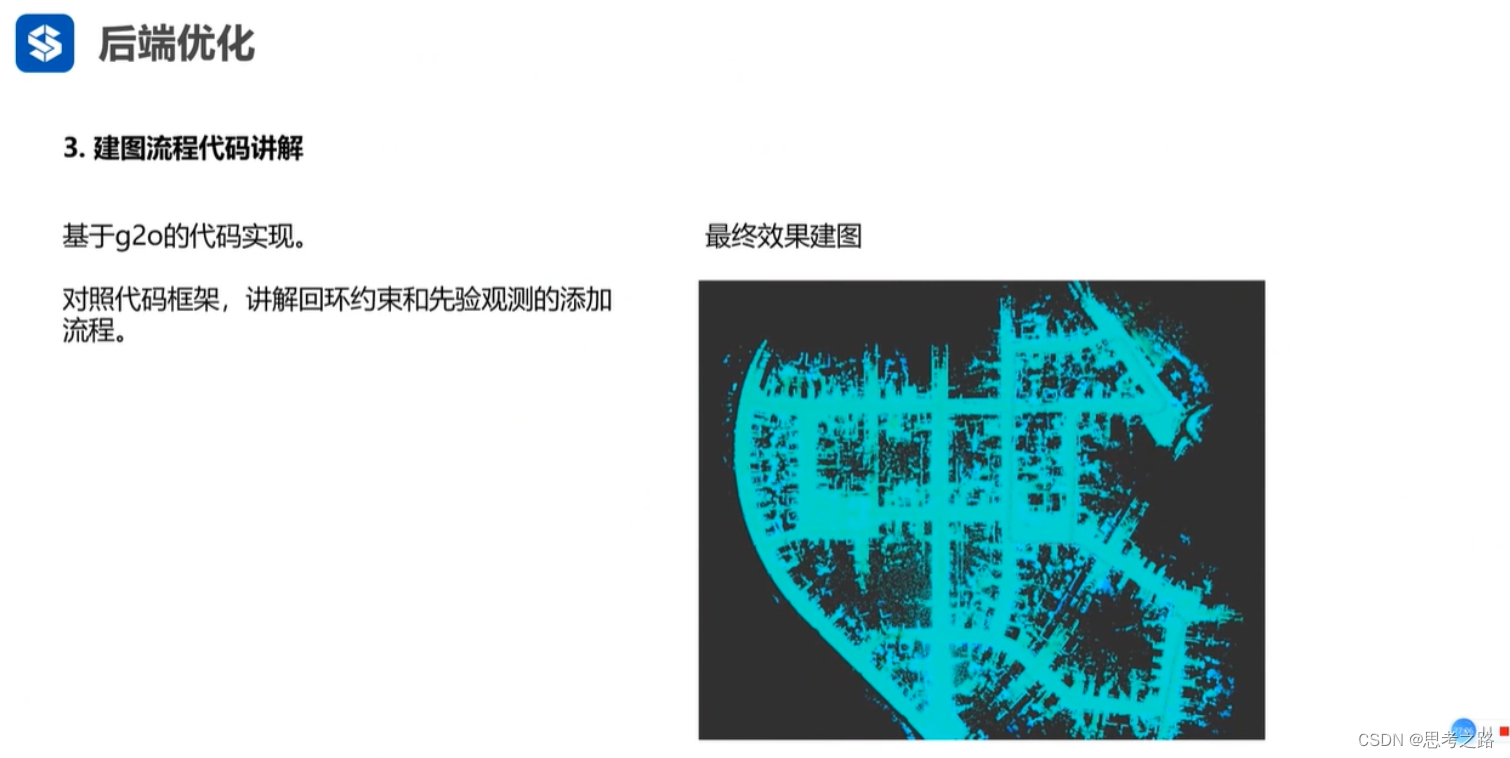
第三节:后端优化与点云地图构建

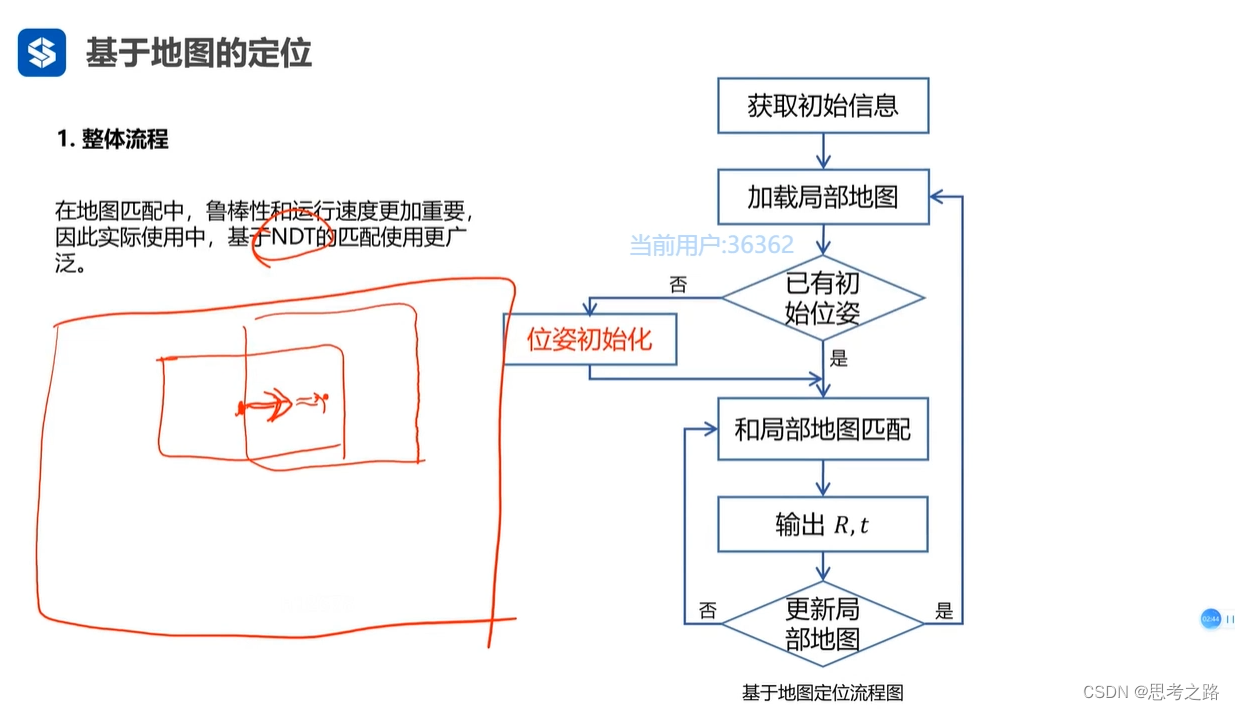
第四节:基于点云地图的定位















 501
501











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









