







 文章回顾了MRAS模型的基本原理,强调了自适应率在转速估计中的关键作用,特别是PI参数的调整对减小误差的影响。虽然PI参数的整定通常依赖于经验,但通过仿真展示了在速度变化时MRAS系统的性能。
文章回顾了MRAS模型的基本原理,强调了自适应率在转速估计中的关键作用,特别是PI参数的调整对减小误差的影响。虽然PI参数的整定通常依赖于经验,但通过仿真展示了在速度变化时MRAS系统的性能。
导读:前期文章已经介绍过模型参考自适应MRAS进行速度估计的方法,本期文章主要是对MRAS实现的细节做一下补充。
若需要文章的仿真模型,关注微信公众号:浅谈电机控制,获取。
一、MRAS知识点回顾
1.1 基本原理
MRAS 模型是目前广泛使用的一种电机转速估算模型,该模型主要包括电压参考模型、电流推算模型和PI 自适应调节模型。基于d-q 两相静止坐标系下电机定子电压、电流与转子磁链的关系,将电压模型的转子磁链作为参考指标,将电流模型的转子磁链作为反馈控制量。当输入量同时输入到上述两个模型中,其产生的转子磁链观测结果的误差量输入至PI 自适应调节模型,自适应控制模型不断更新参数,将推算模型的输出量趋近于参考模型的输出。其中,电流模型转子磁链中包含转子转速变量,因此,可以从中获得转子转速的估算值。
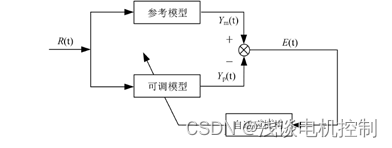
图1-1 MARS基本结构框图
1.2 自适应率的设计
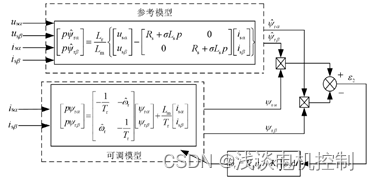
图1-2基于转子磁链模型的MRAS转速估计框图
基于MRAS的转速估计系统中,自适应律的选取至关重要。选取自适应律的主要用到的方法有:局部参数最优化法(MIT法)、Lyapunov函数法、Popov超稳定性理论法。常用的
MRAS转速估计法包括:基于瞬时无功功率模型、基于反电动势模型、基于转子磁链模型。现有文献采用PI调节器作为自适应律,根据Popov超稳定性理论证明了采用PI调节器作为自适应律可以使整个MRAS系统保持全局渐进稳定。
细节之处:MRAS的自适应率中的PI参数缺少整定的相关理论。
二、仿真系统搭建
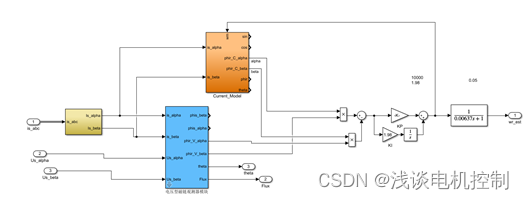
图2-1 MARS系统仿真
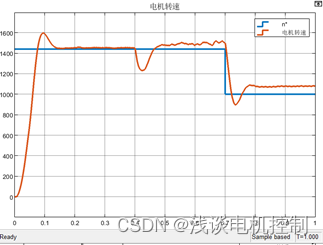
图2-2 MARS系统仿真波形变化情况
从图2-2可知,速度估计在加载和速度变化的过程中,估计误差很大,但可以通过调节自适应的PI参数来减小误差。但PI参数的获取只能靠经验试凑获取。

















 4968
4968

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









