







【更多ROS学习,见个人专栏】ROS https://blog.csdn.net/weixin_48064852/category_12710123.html?spm=1001.2014.3001.5482
https://blog.csdn.net/weixin_48064852/category_12710123.html?spm=1001.2014.3001.5482
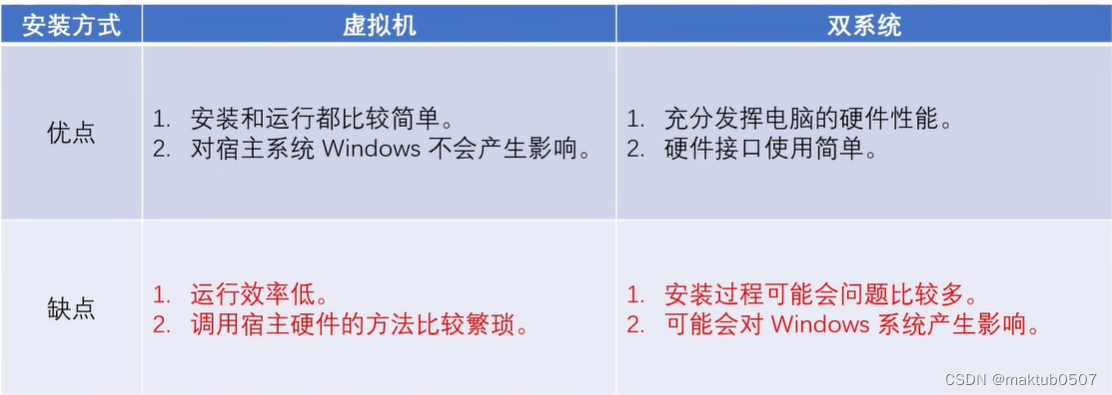
一、安装
二、ROS—Linux使用
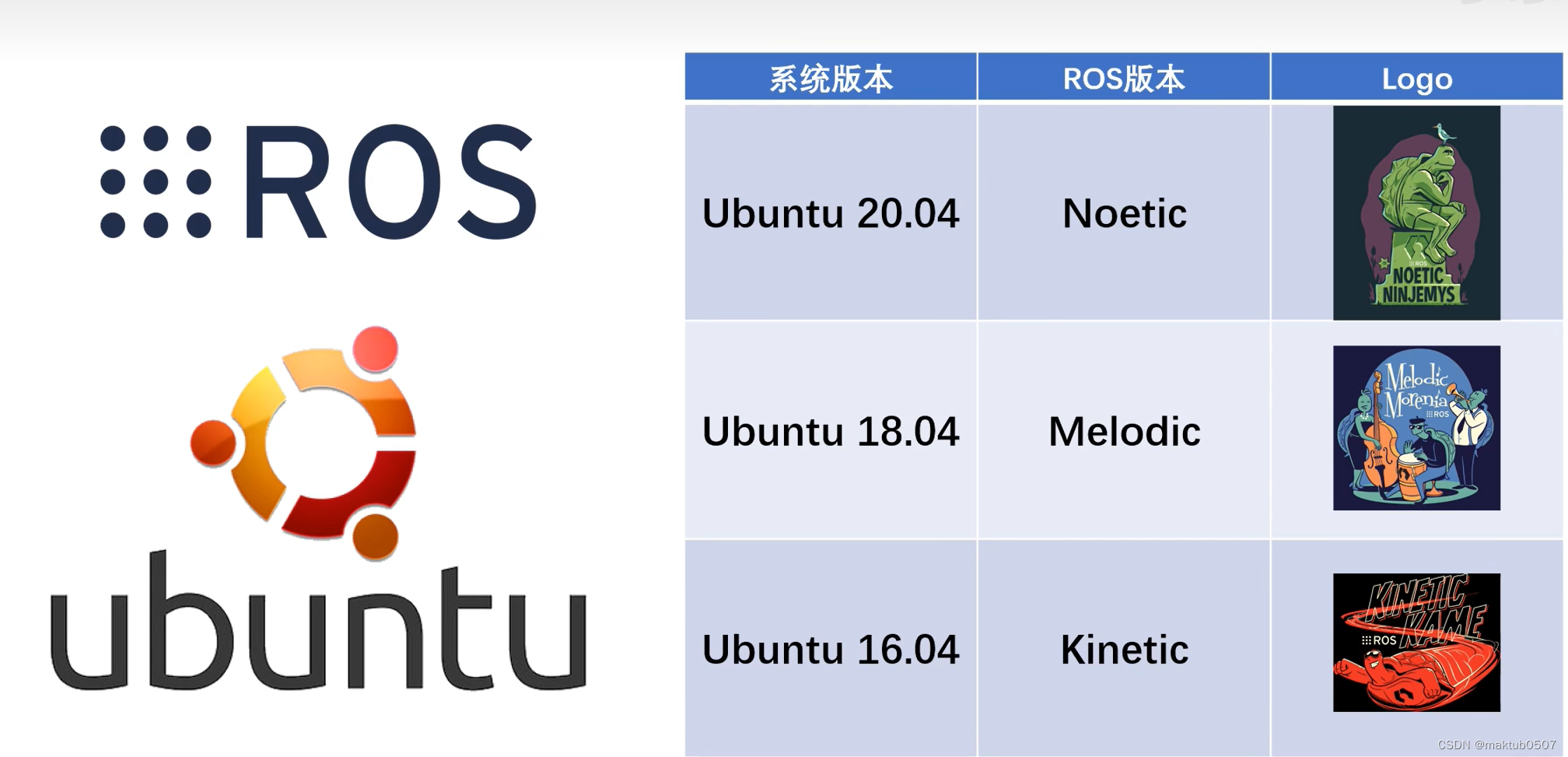
三、ROS安装
1.www.ros.org——选择对应版本。
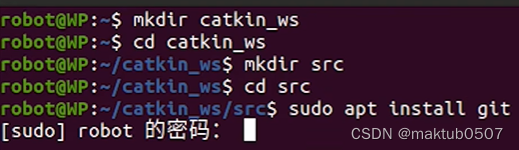
四、软件包下载
4) 安装软件包: $sudo apt install [packages name]
5) 使用软件包:$ rosrun [packageName] [NodeName] (中间横杠改为下划线)
5)catkin环境参数加载至终端工作空间, 此步骤可以直接写入 gedit ~/.bashrc

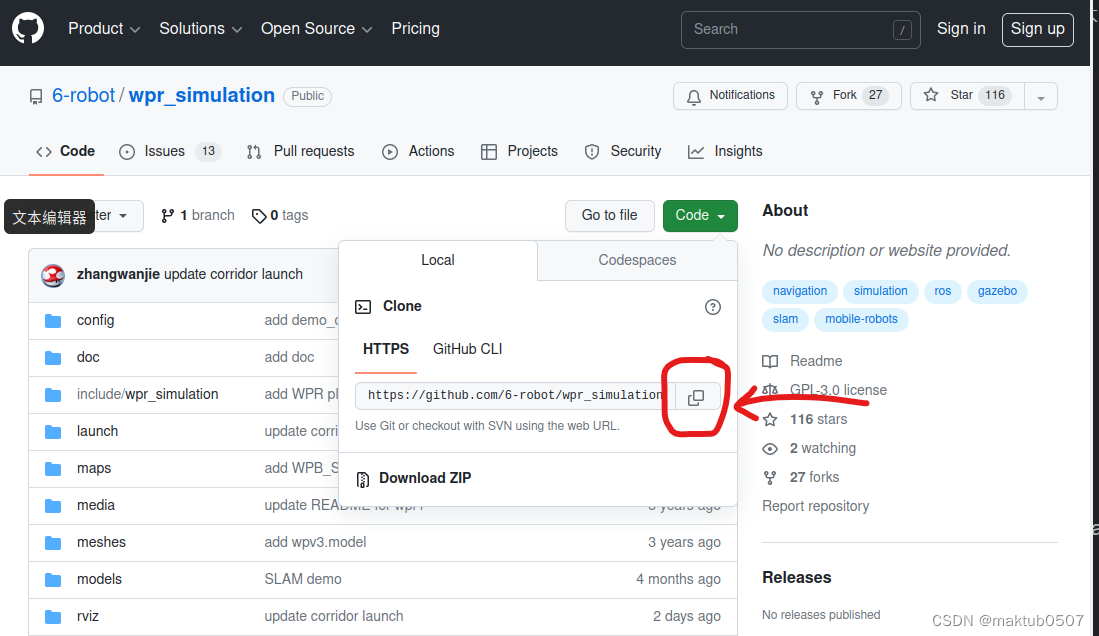
3.ros-index中的软件包源代码,在GitHub可找到,利用2的方法,进行下载编译,或者修改编译使用。















 55
55











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









