







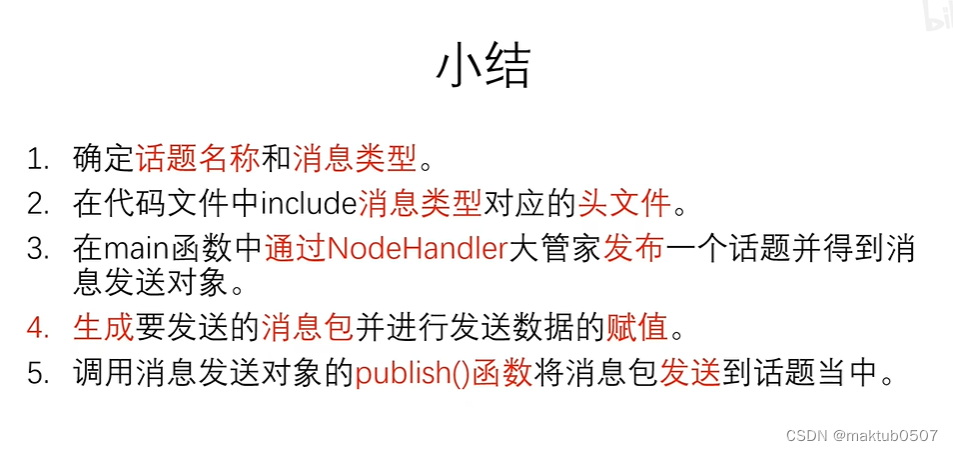
C++ 编写 Publisher Node
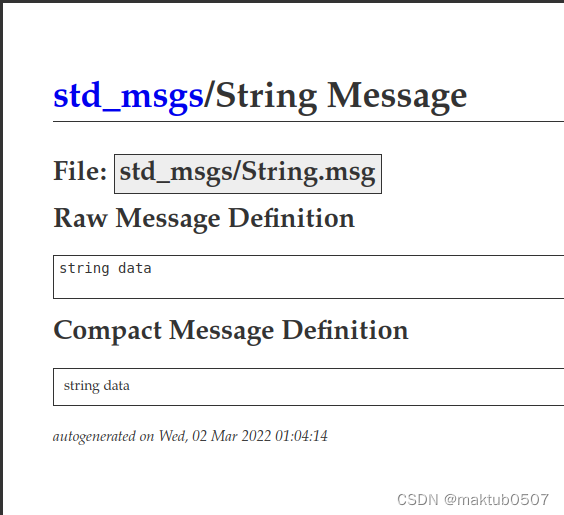
1.确定发布者消息类型,在index网站中查看使用方法
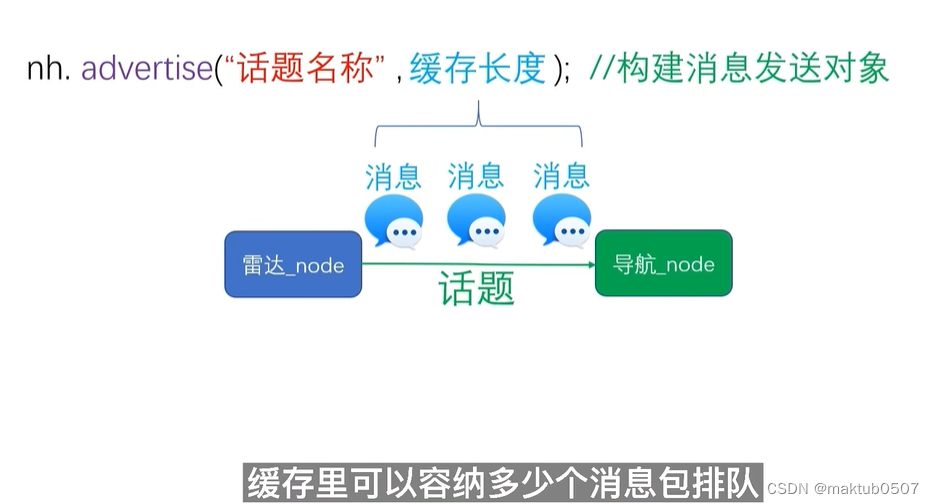
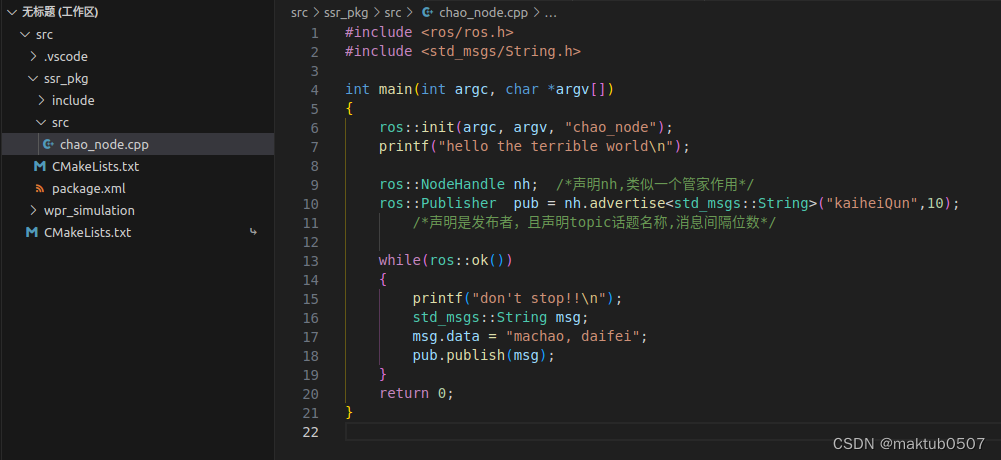
2.将之前 chao_node 改造为 Publisher:
3.运行 Publisher Node
使用 rostopic list 查看活跃的 topic 会话

使用 rostopic echo /kaiheiQun,查看 massage
使用 rostopic hz /kaiheiQun, 查看发送massage情况
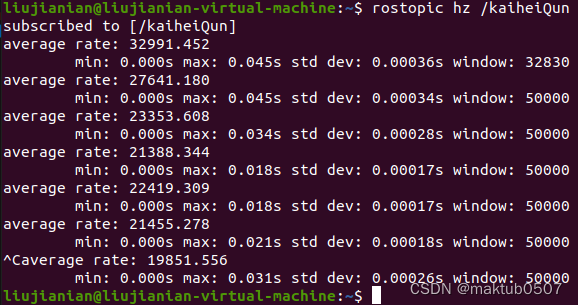
控制速率
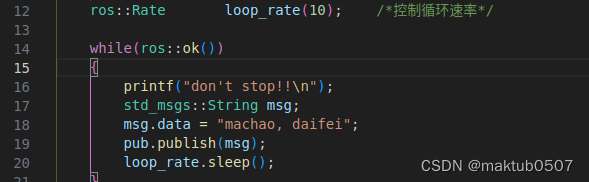
结果:稳定在10

 C++实现 Subscriber Node
C++实现 Subscriber Node
- 新节点需要新创建包atr_pkg

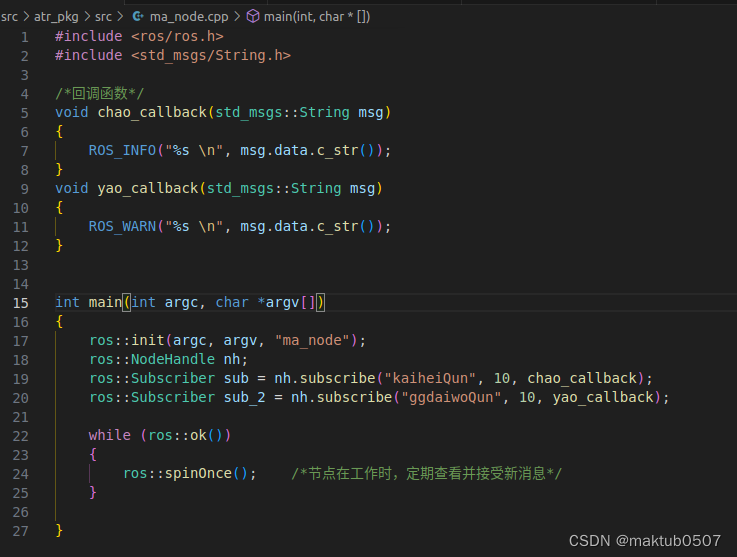
- 主体代码:
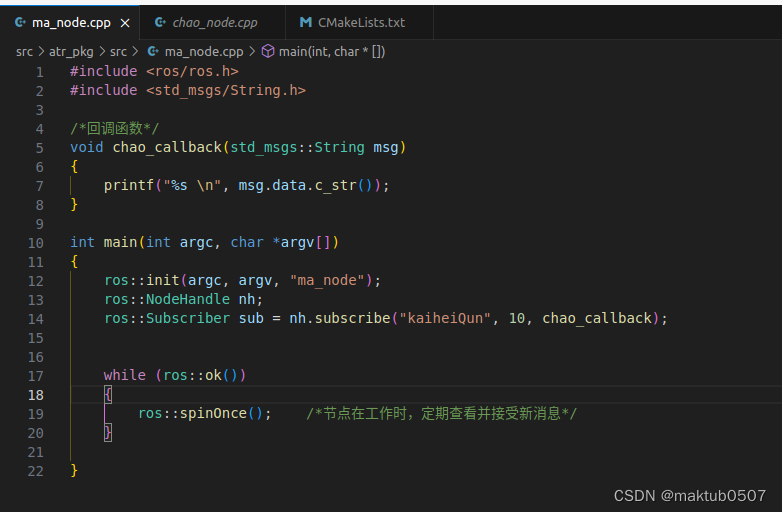
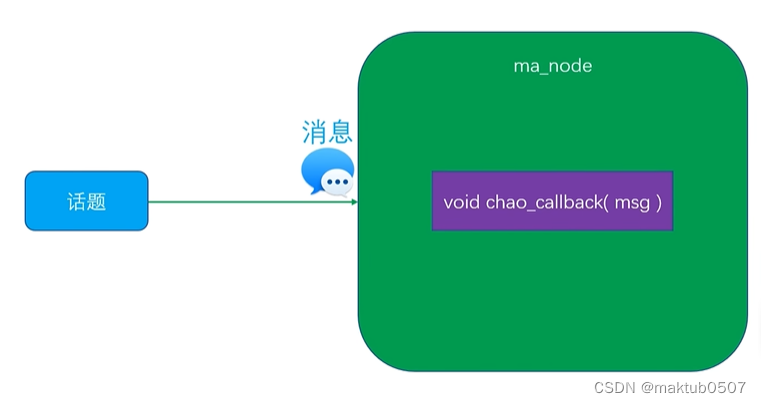
ps: 回调函数:系统自动调用函数,接收数据包
- 编译运行
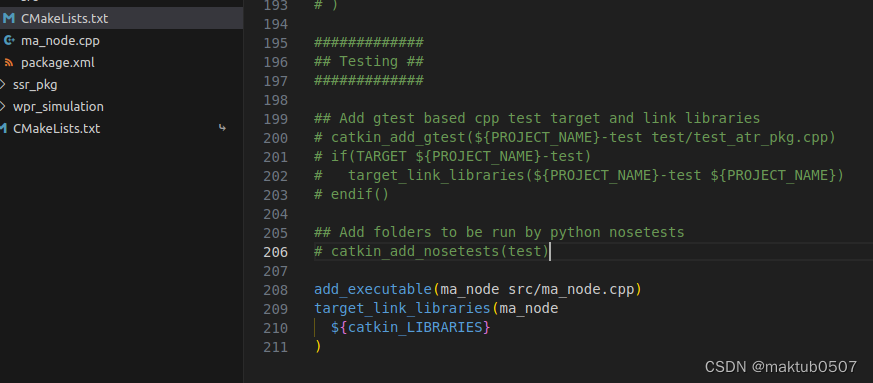
ps: 此处报错,将 ma_node.cpp 放置在 src目录下
- 同时运行 chao_node 和 ma_node 节点,并建立连接

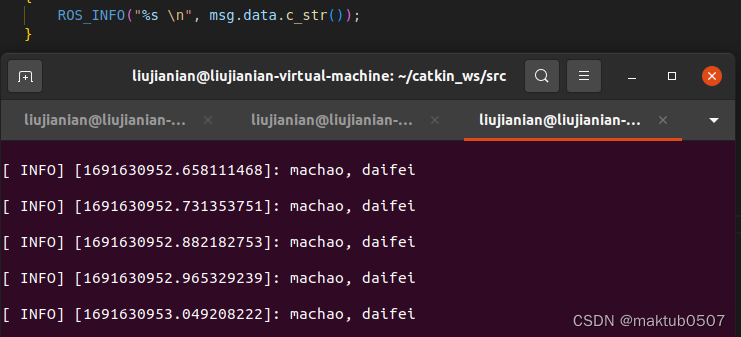
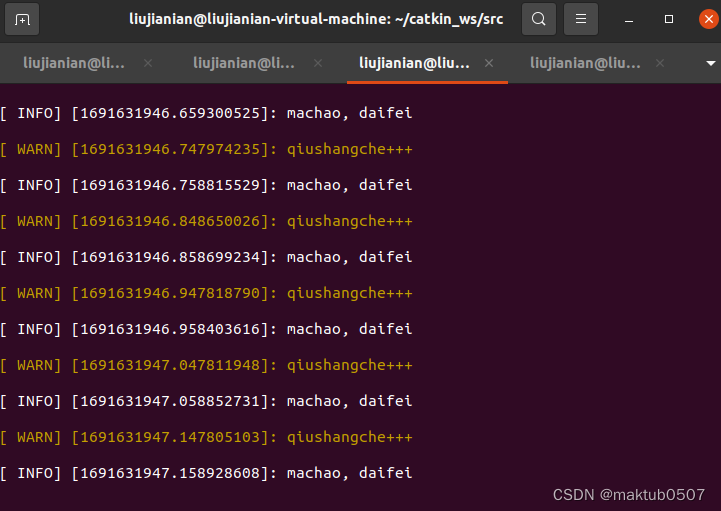
chao_node 节点发送信息 “machao, daifei” ,但不可见,don't stop是节点运行一个printf

ma_node 节点成功接收
ps:topic 名字必须一直,否则出现接收不到消息
- 修改 printf 为 ROS_INFO ( )
- 在 ma_node 中订阅 yao_node 节点

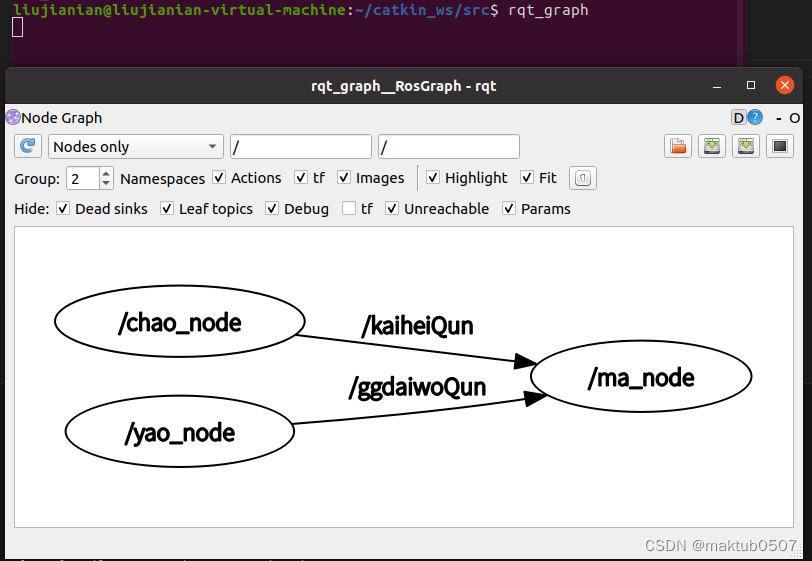
- rqt_graph
- 总结
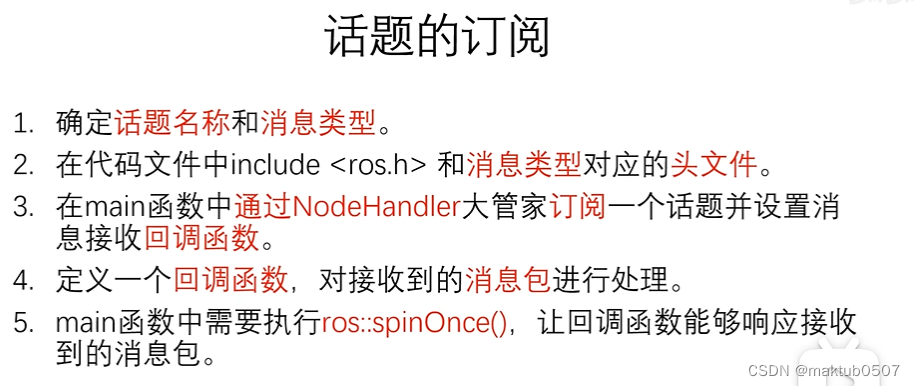
ps:只要需要,随时调用 ros::spinOnce()















 4839
4839











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









