






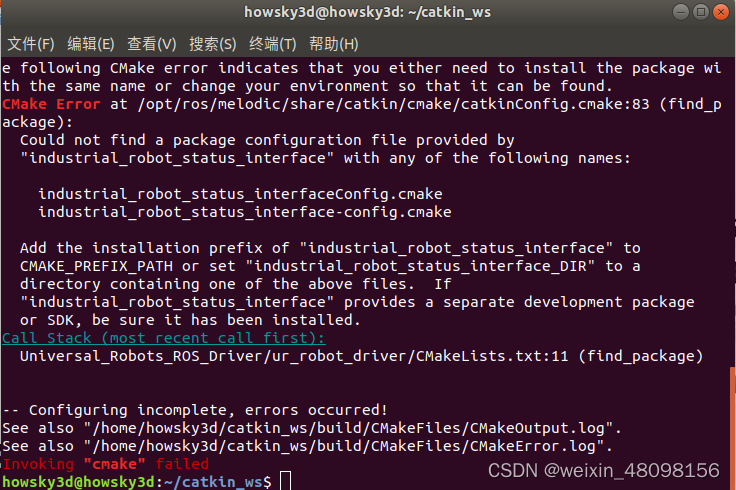
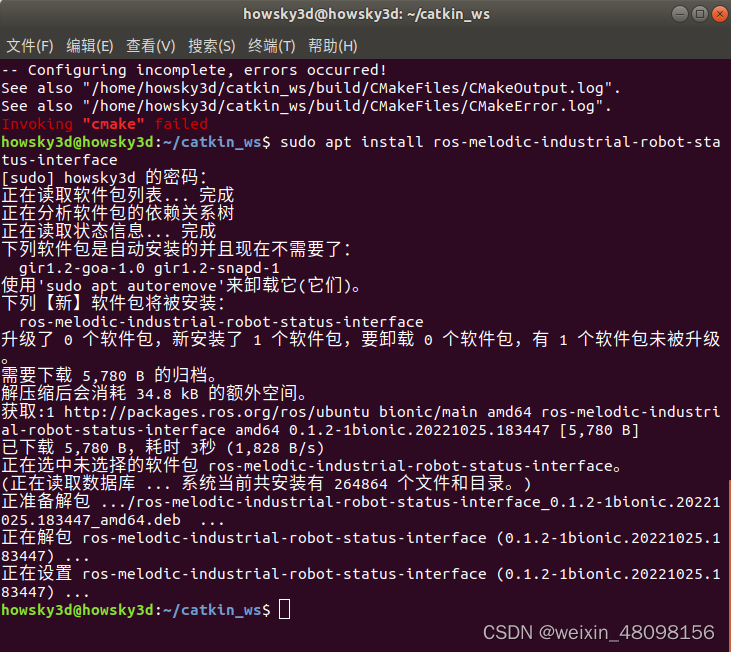
代码:sudo apt install ros-melodic-industrial-robot-status-interface
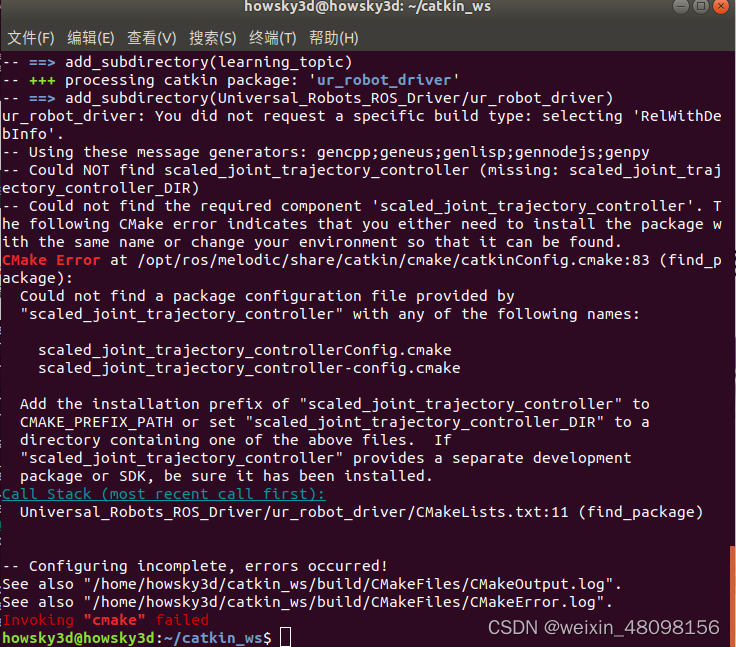
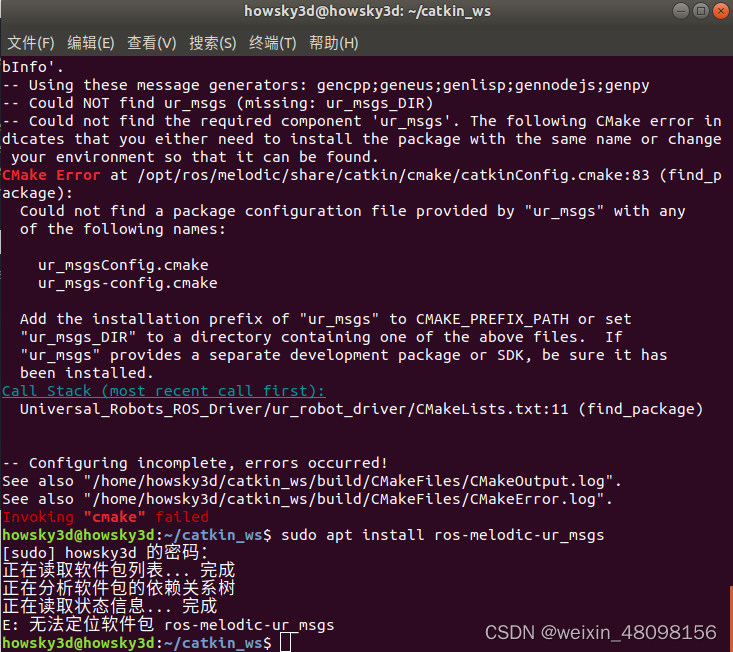
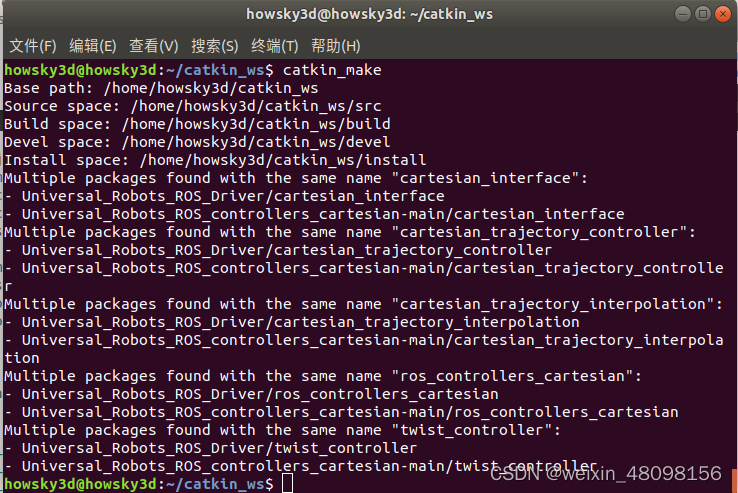
执行一下catkin_make看下报错原因
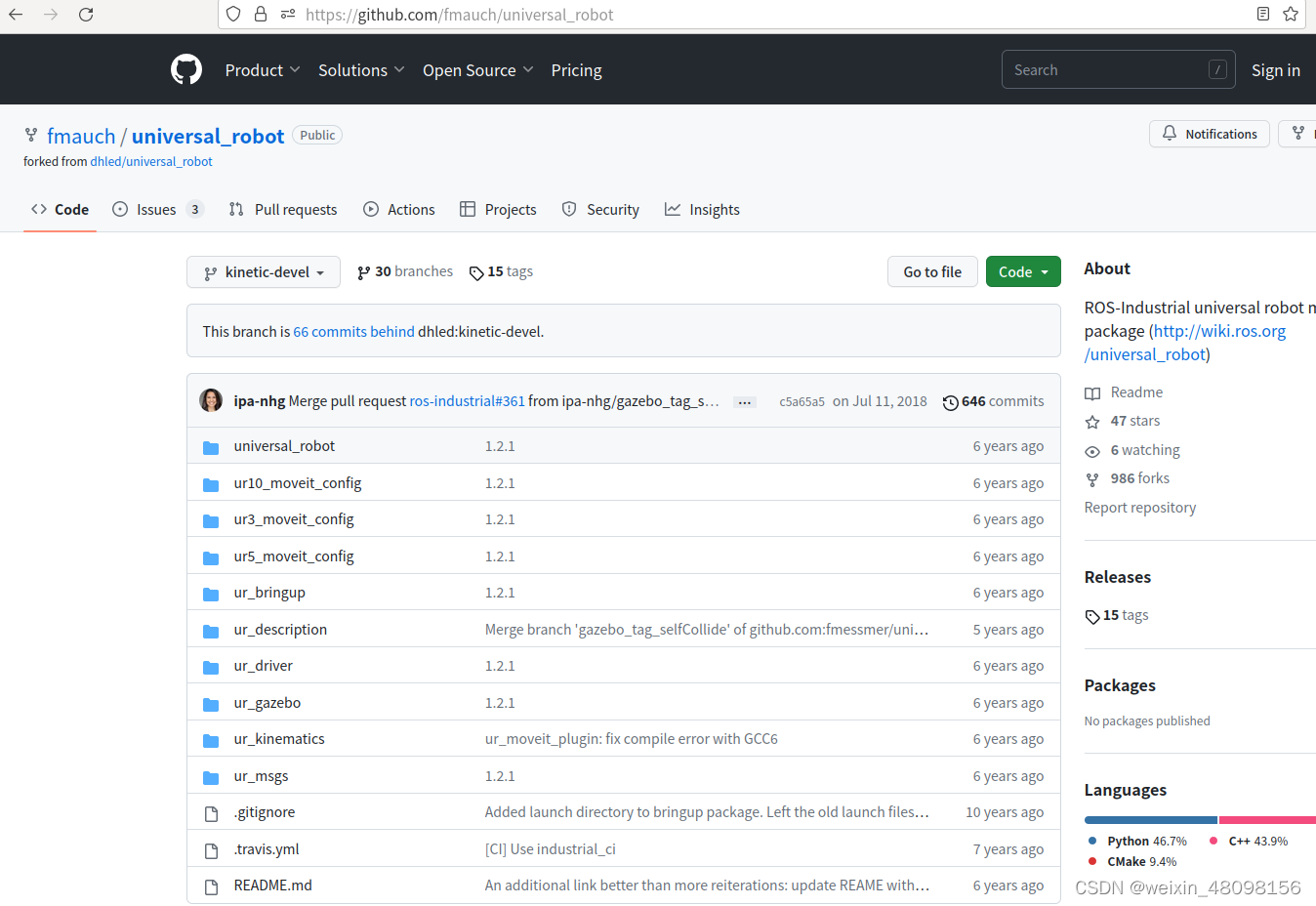
ur_msg这个包和驱动包不在一个地址上【下面给出地址】。老版本好像在一个地址上

传递消息地址:https://github.com/fmaunch/universal_robot

编译成功
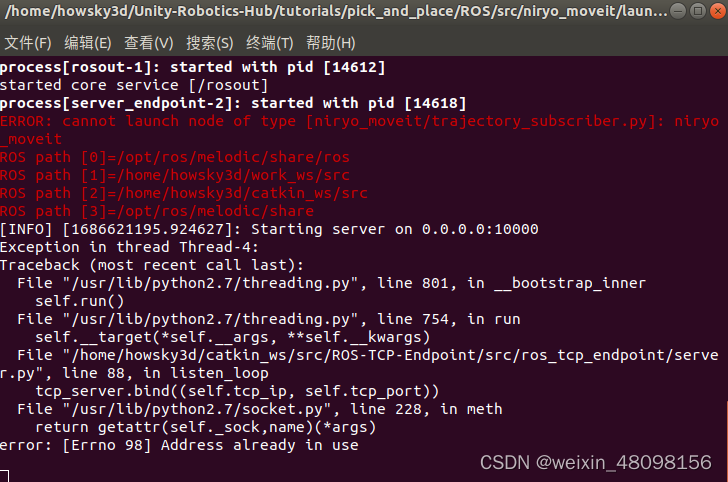
 其他的一些小bug:
其他的一些小bug:
当你执行catkin_make报错时,运行*.launch执行,会报错。就个人而言,我认为要先安装好所有的依赖包【大概十几个】,编译成功后运行,基本出问题都很好就决。
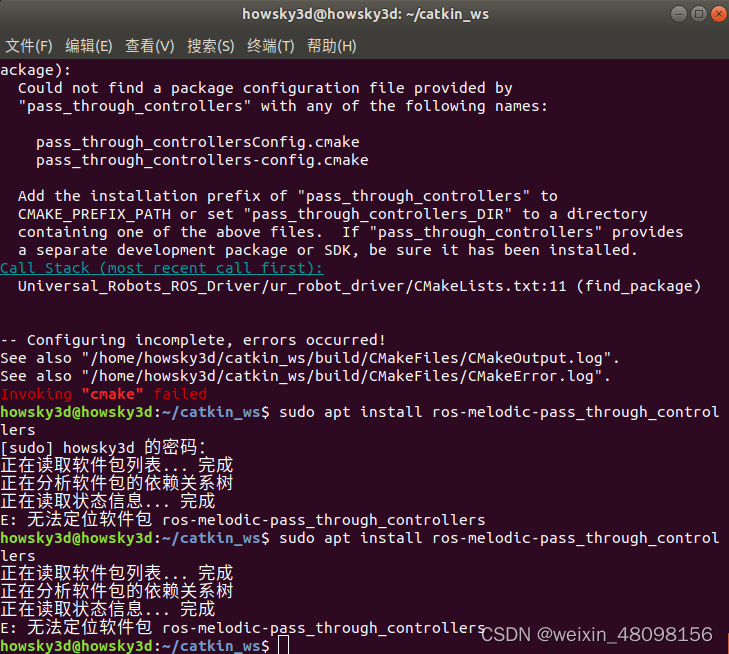
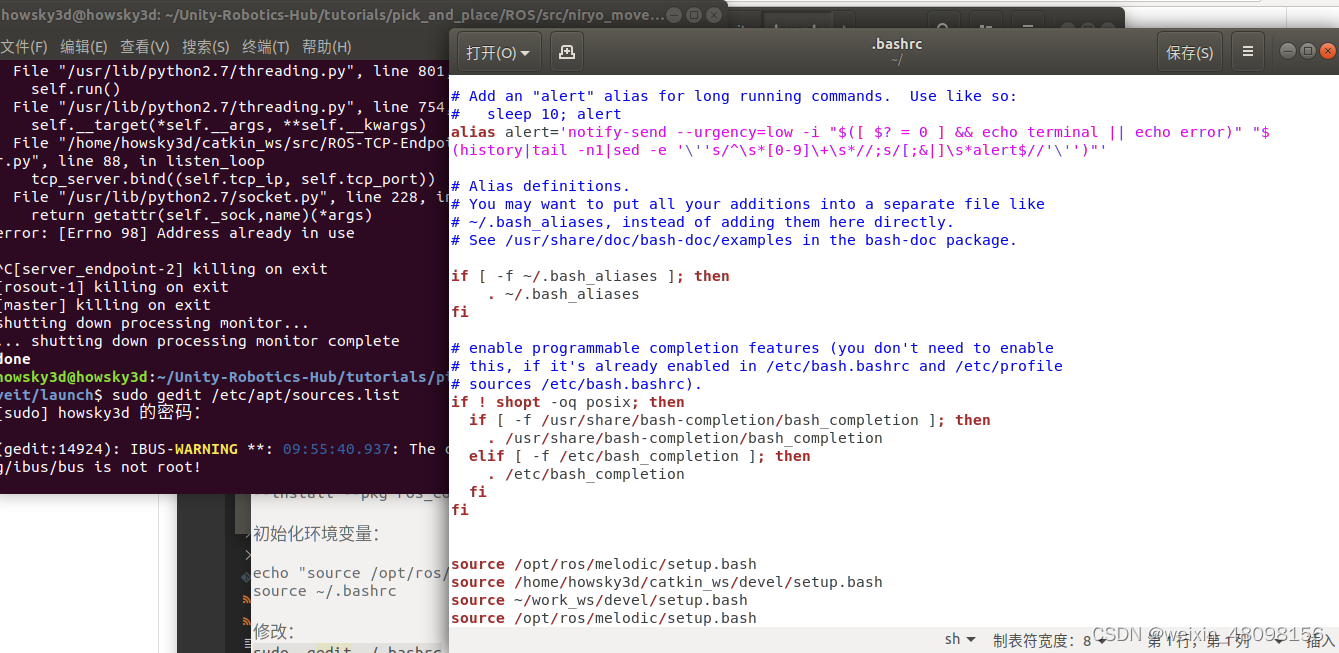
注意:切换到你设定的ROS工作目录执行通过用公式sudo apt-get install ros-melodic-包名
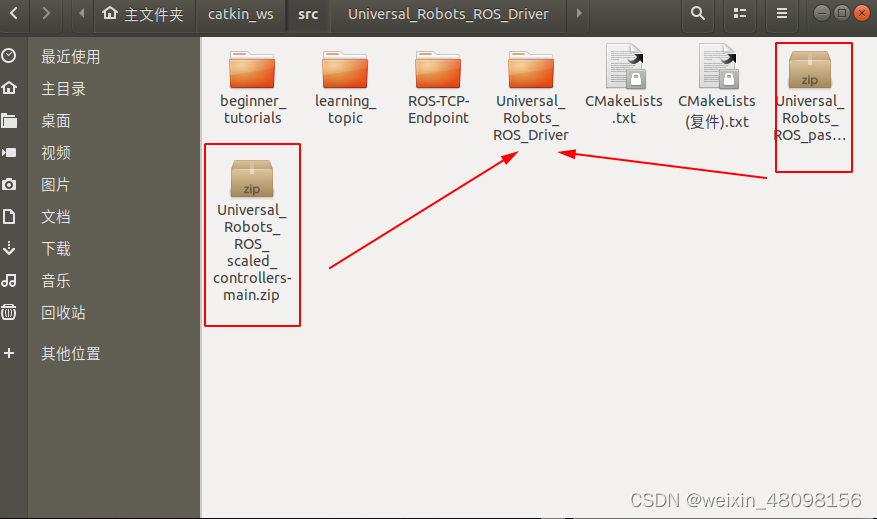
当包名无法定位就到github找一下文件或者百度一下















 3414
3414











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









