






1.切换到ROS的目录,检查当前环境是否把 当前用户添加到docker组中
命令:
git clone -b melodic-devel https://github.com/ros-industrial/universal_robot.git
把文件 放到合适的目录【我的:/home/howsky3d/ros_work/Unity-Robotics-Hub/tutorials/pick_and_place】

命令部分:【# 为注释】
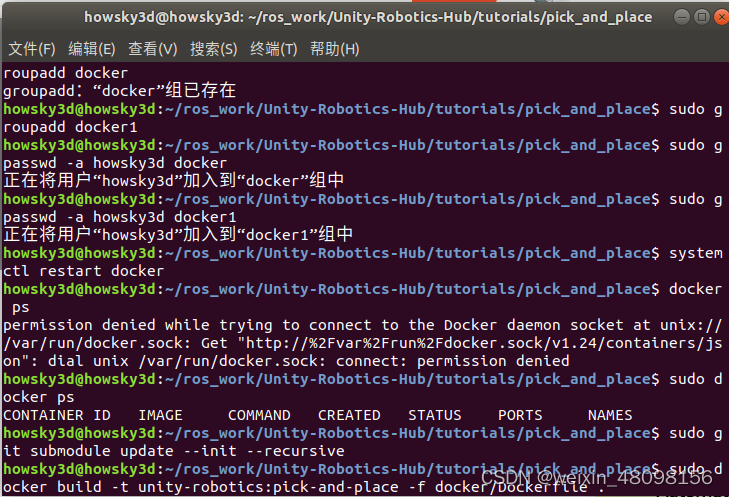
sudo cat /etc/group #查看当前系统有哪些组,里面有docker组,验证docker是否有当前用户
sudo groupadd docker #添加docker用户组
sudo gpasswd -a $XXX docker #检测当前用户是否已经在docker用户组中,其中XXX为用户名。
sudo gpasswd -a $USER docker #将当前用户添加至docker用户组
newgrp docker #更新docker用户组
sudo service docker restart #重启docker服务
newgrp - docker #切换当前会话到新group或重启会话
2.已经安装docker,无法启动,检查当前用户的权限【命令前加 sudo】

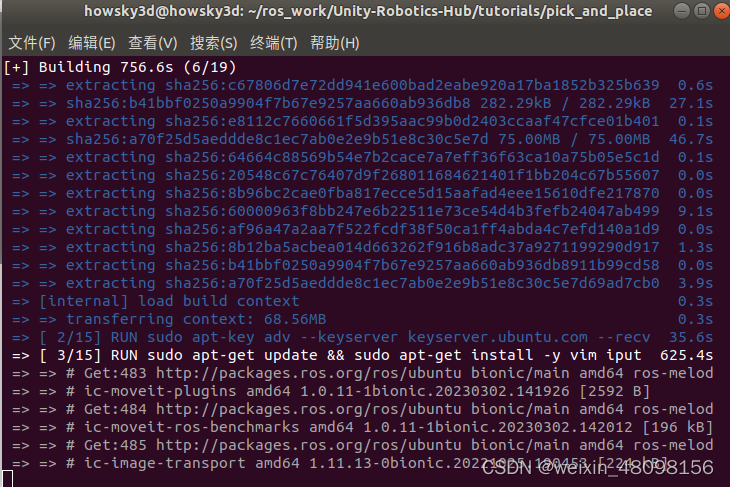
4.执行中
命令:
sudo docker ps #查看目录结构
sudo git submodule update --init --recursive
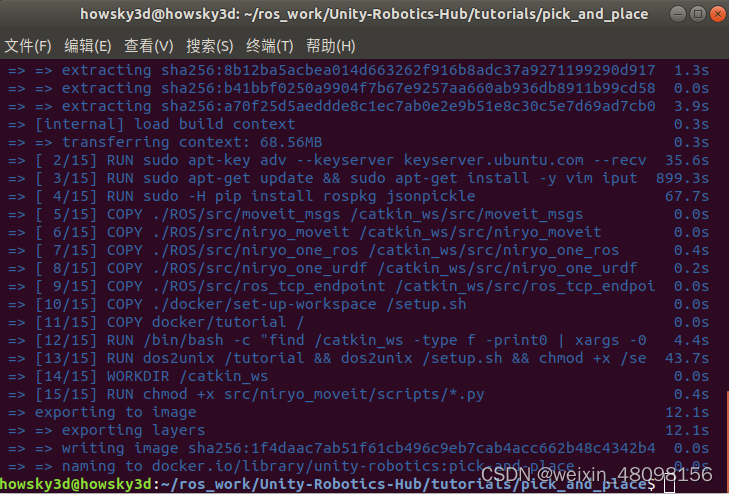
sudo docker build -t unity-robotics:pick-and-place -f docker/Dockerfile .
成功后页面
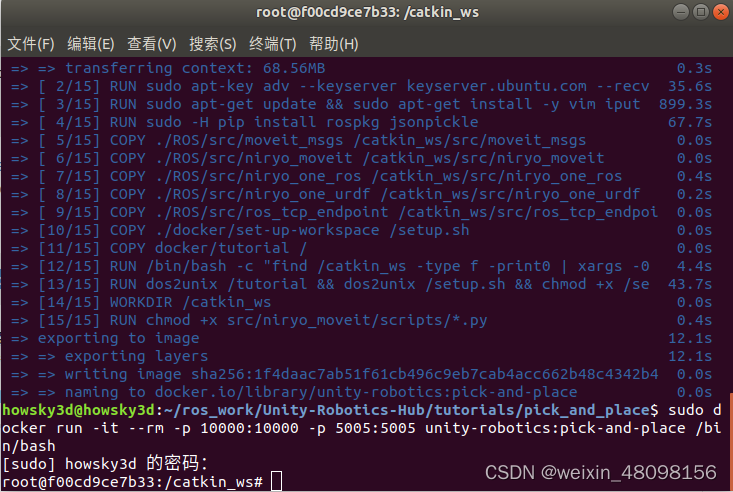
命令:
sudo docker run -it --rm -p 10000:10000 -p 5005:5005 unity-robotics:pick-and-place /bin/bash















 2383
2383











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









