






文章目录
前言
ROS Melodic
Ubuntu 18.04
ROS、MAVROS及PX4环境安装参考: 这里默认已经安装好ROS、MAVROS及PX4环境
一、安装依赖
sudo apt install ros-melodic-libuvc
sudo apt-get install ros-melodic-navigation*
sudo apt install ros-melodic-camera-info-manager
sudo apt install ros-melodic-tf2-geometry-msgs
sudo apt install ros-melodic-laser-geometry
sudo apt install ros-melodic-tf2-sensor-msgs
sudo apt install ros-melodic-mavros
sudo apt install ros-melodic-costmap-converter
sudo apt install ros-melodic-interactive-markers
sudo apt install ros-melodic-mbf-costmap-core
sudo apt install ros-melodic-mbf-msgs
sudo apt-get install ros-melodic-librealsense2
sudo apt-get install ros-melodic-serial
sudo apt-get install qt4-default
sudo apt-get install ros-melodic-bfl
sudo apt-get install libsuitesparse-dev
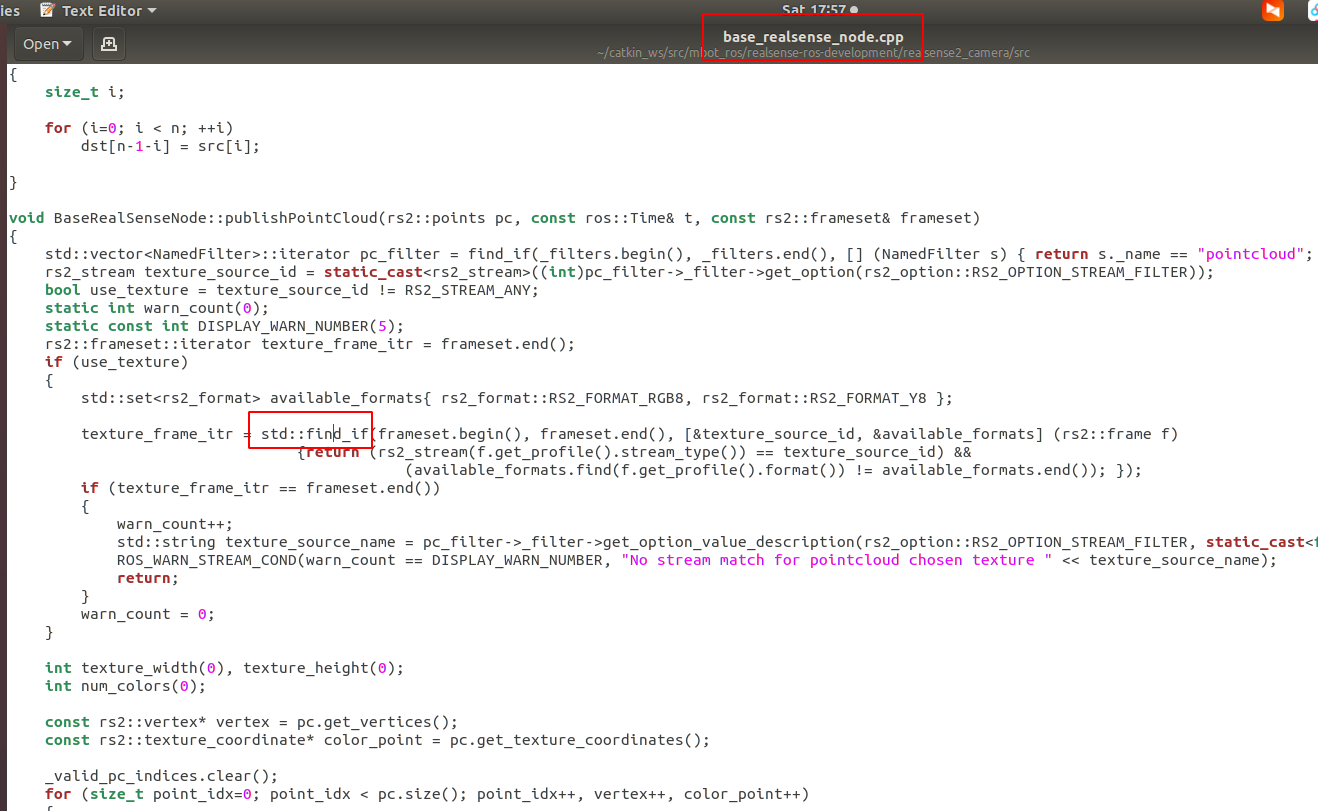
sudo apt-get install ros-melodic-libg2o如果编译时报错:
/home/bit/flycarBJ/src/realflight_modules/realsense2_camera/src/base_realsense_node.cpp:2223:29: error: ‘find_if’ was not declared in this scope
2223 | texture_frame_itr = find_if(frameset.begin(), frameset.end(), [&texture_source_id, &available_formats] (rs2::frame f)找到报错的源码位置,在find_if前面加上std::即可。
cd ~/catkin_ws/
catkin_make















 950
950











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









