







一、准备步骤:
1.安装 RSView
(1)网址:http://www.robosense.ai/web/resource/cn,我这边是16线激光雷达,按照自己的版本下载就行了,如下图所示:
windows电脑下载ZIP压缩包,压缩包存放路径不能有中文,不然就像如下所示:

取消压缩包中文路径,这个问题就解决了。
(2)打开lidar16文件----->bin----->RSView.exe
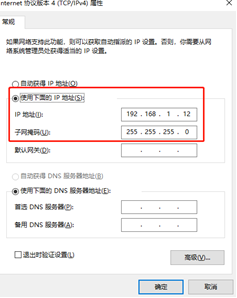
RS-LIDAR-16 接通电源,并用网线和电脑连接,并配置自己以太网地址为雷达官方指定ip
右键使用管理员权限运行打开 RSView 软件。
点击 File > Open 并且选择 Sensor Stream

接下来点击Tools---->Sensor Network Configuration,如图所示
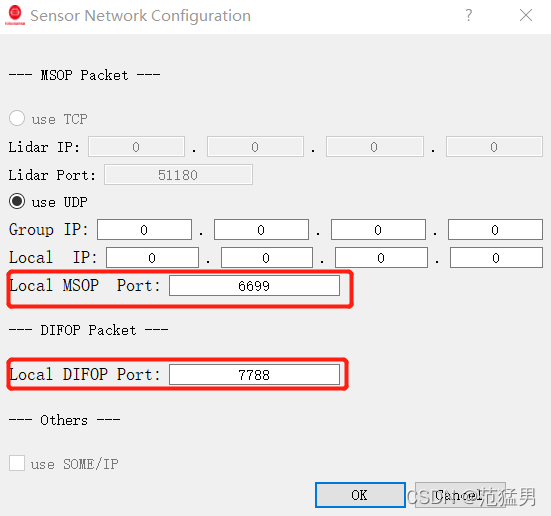
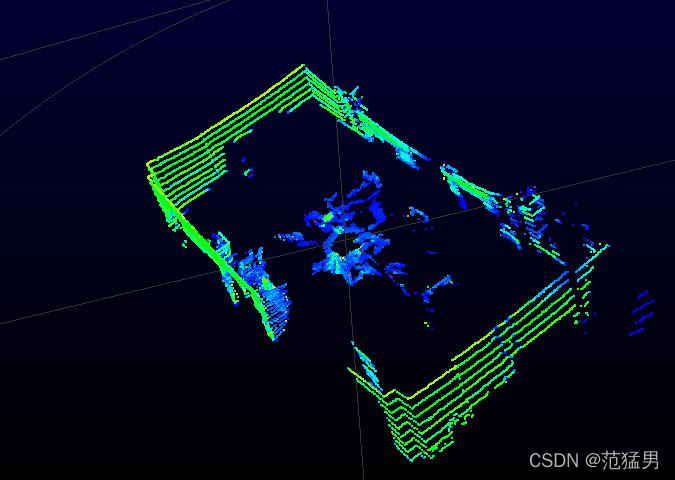
上面两个端口分别是6699和7788,如果配置正确的话就会出现如下画面:
2.安装wireshark抓包软件
如果以上配置官方ip时出现问题的时候,比如你不知道需要配置的ip是多少的时候,就可以使用抓包工具
如果抓包成功的话,会出现以下界面:
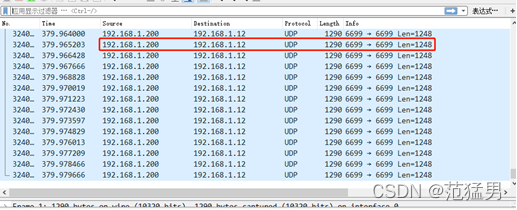
这就表明激光雷达的ip是192.168.1.200,向电脑ip192.168.1.12发送一包包的点云信息,说明配置电脑ip时,ip地址填写192.168.1.12,子网掩码填写255.255.255.0
二、雷达标定
以上需要用到软件的准备工作结束,进入雷达标定。
1.将雷达水平放置,根据点云图,将雷达Y轴方向与车正前方统一,水平转角尽可能接近于0;
2.调整垂直方向,一般车顶雷达水平或稍微向下倾斜(1°2°,可用手机或更精密的一起测得),车前雷达向下倾斜角度稍大(5°10°)。通过点云图可以看盲区范围,盲区范围尽可能调小,但要保证车前雷达打的最远的线和车顶雷达打的最近的线有重合部分,否则两雷达检测范围中间会有盲区
3.将纸箱均匀的摆放在车前,左、右、中间、前、后都要顾及到,一般的范围是靠近车辆的第一根先~20m/30m的范围,具体根据雷达的位置而定。

4.根据RSVIEW软件点云图调整纸箱位置,尽量保证不同距离的雷达扫描线都能打到纸箱上,并且要确保雷达线打在下图中的L_up或者L_down上,可以通过调整纸箱至刚好检测到有障碍的位置来实现。由于这两条线上有箱子的角点,便于车提坐标系下测量其坐标。
L_up的寻找:可通过看前视图和俯视图寻找。打到F面上的雷达线在雷达坐标系下,y值相同,z值不同,打到U面上的雷达线y值不同,z值相同,以此来寻找临界线,当箱子往前(靠近车的方向)推时,线会打到U面上,导致z值不变,y值增大,当箱子往后(远离车的方向)推时,线会打到F面上,导致改线的z值减小,y值不变。
L_down的寻找:打到箱子上的线和地面线重合,两者z值相差不大,利用反射率区分箱子和地面。

5.按照4中提到的方法,将箱子一个一个调整好位置,每调整好一个箱子,就应该用胶带在地面上贴出箱子的位置,以防箱子被风吹或者不小心移动后可以将其放置到原位置,并在顶层标注好箱子的标号,在记录本上画出箱子的相对位置和找出的角点。理论上来说,找出4个点已经足够解方程,但容易带来很大的误差,所以我们尽量多选取点,最后用回归的方法解出转换矩阵A(有程序支持),一般记录16个以上的点.
6.当所有的箱子摆好后,需要让人远离标定场地,只剩下箱子,用RSview记录一段此时的点云数据并保存至离线数据。
7.惯导的位置在地面的投影位于两个后轮胎连线的重点,用卷尺拉在两个轮胎中间并延长,用宽胶带贴出两个轮胎的位置,并根据卷尺的度数,标出中点的位置,前轮胎做同样的操作。连接前后轮标记出的两个中点为车体坐标的Y轴,后轮胎为车体坐标的X轴,以此为原点,用卷尺测量并记录每个箱子所选中角点在车体坐标下的(x,y,z)值,注意,位于Y轴左侧的箱子,角点的X值应为负值。

8.(1)在实时显示数据时点击Record按钮。

(2)在弹出的ChooseOutputFile对话框中,选择需要保存的路径和保存的文件名后,点击“保存(S)”按钮。RSView将开始将数据包文件写入目标pcap文件中。(注意:RS-LiDAR-16将会产生大量的数据,随着记录时间变长,目标pcap文件将会变大。因此最好将记录文件保存到HDD或者SSD中,而不是保存到较慢的USB设备或者用网络保存)。

(3)再次点击Record按钮停止保存pcap数据
9.回放pcap数据
可以使用RSView对RS-LiDAR-16保存的数据pcap文件进行回放或者测试。您可以使用Play按钮去播放或者选择数据中个别帧。也可以用鼠标选择3D点云数据中的一部分,然后打开表格进行分析。pcap文件的保存路径不可以有中文。
(1)点击File>Open并且选择CaptureFile。

打开成功后,就是当时录制的点云视频

10.读取5中保存的离线文件角点的值,并记录,到此,得到了若干相同的点分别在雷达坐标系下和车体坐标系下的坐标,假设有N个点
点id 雷达坐标系Q 车体坐标系P
1 (x_q1,y_q1,z_q1,1) (x_p1,y_p1,z_p1)
2 (x_q2,y_q2,z_q2,1) (x_p2,y_p2,z_p2)
… … …
n (x_qn,y_qn,z_qn,1) (x_pn,y_pn,z_pn)
解矩阵A的matlab代码如图所示,将两个坐标系下的坐标填入,并求解,代码中箭头所指的位置赋值为x_p’,求解的是A中第一列的值 ,y_p’为第二列 ,z_p’为第三列 。将三个值赋值一遍后得到矩阵A,在程序中修改相关代码。

至此得到雷达坐标系和车体坐标系之间的转换矩阵A,后面可以添加在上层代码里。














 373
373











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









