







以Euroc双目+IMU为例
前提条件
- 能够成功运行vins fusion
EVO安装与使用
可参考链接:
链接: 测评工具evo安装与使用
打开终端安装EVO
pip install evo --upgrade --no-binary evo
修改Euroc配置文件euroc_stereo_imu_config.yaml
- 输出路径修改
output_path: "/home/jia/Desktop/algorithm/VINS-Fusion1/evo_result/"
pose_graph_save_path: "/home/jia/Desktop/algorithm/VINS-Fusion1/evo_result/" # save and load path
修改源代码
- vins fusion保存的数据集格式evo无法直接利用,需要改成evo能够使用的数据格式
visualization.cpp中pubOdometry()函数
- 修改前
// write result to file
ofstream foutC(VINS_RESULT_PATH, ios::app);//这意味着如果文件已经存在,新的数据将追加到文件末尾。如果文件不存在,将创建一个新文件
foutC.setf(ios::fixed, ios::floatfield);//这行代码将浮点数输出格式设置为固定格式,这意味着浮点数将以固定的小数位数显示
foutC.precision(0);//这行代码将浮点数的精度设置为0,这意味着它们将被显示为没有小数位数的整数。
foutC << header.stamp.toSec() * 1e9 << ",";//时间戳+;
foutC.precision(5);//输出小数点为5
foutC << estimator.Ps[WINDOW_SIZE].x() << ","
<< estimator.Ps[WINDOW_SIZE].y() << ","
<< estimator.Ps[WINDOW_SIZE].z() << ","
<< tmp_Q.w() << ","//四元数
<< tmp_Q.x() << ","
<< tmp_Q.y() << ","
<< tmp_Q.z() << ","
<< estimator.Vs[WINDOW_SIZE].x() << ","
<< estimator.Vs[WINDOW_SIZE].y() << ","
<< estimator.Vs[WINDOW_SIZE].z() << "," << endl;
foutC.close();//这行代码在写入数据后关闭文件
Eigen::Vector3d tmp_T = estimator.Ps[WINDOW_SIZE];//这行代码创建一个名为 tmp_T 的新的 Eigen::Vector3d 对象,并将其赋值为 estimator.Ps[WINDOW_SIZE] 的值。
printf("time: %f, t: %f %f %f q: %f %f %f %f \n", header.stamp.toSec(), tmp_T.x(), tmp_T.y(), tmp_T.z(),
tmp_Q.w(), tmp_Q.x(), tmp_Q.y(), tmp_Q.z());
- 修改后
ofstream foutC(VINS_RESULT_PATH, ios::app);
foutC.setf(ios::fixed, ios::floatfield);
foutC.precision(9);
foutC << header.stamp.toSec() << " ";
foutC.precision(5);
foutC << estimator.Ps[WINDOW_SIZE].x() << " "
<< estimator.Ps[WINDOW_SIZE].y() << " "
<< estimator.Ps[WINDOW_SIZE].z() << " "
<< tmp_Q.x() << " "
<< tmp_Q.y() << " "
<< tmp_Q.z() << " "
<< tmp_Q.w() << endl;
foutC.close();//这行代码在写入数据后关闭文件
Eigen::Vector3d tmp_T = estimator.Ps[WINDOW_SIZE];//这行代码创建一个名为 tmp_T 的新的 Eigen::Vector3d 对象,并将其赋值为 estimator.Ps[WINDOW_SIZE] 的值。
printf("time: %f, t: %f %f %f q: %f %f %f %f \n", header.stamp.toSec(), tmp_T.x(), tmp_T.y(), tmp_T.z(),
tmp_Q.w(), tmp_Q.x(), tmp_Q.y(), tmp_Q.z());
pose_graph.cpp中的updatePath()函数
- 修改前
ofstream loop_path_file(VINS_RESULT_PATH, ios::app);
loop_path_file.setf(ios::fixed, ios::floatfield);
loop_path_file.precision(0);
loop_path_file << (*it)->time_stamp * 1e9 << ",";
loop_path_file.precision(5);
loop_path_file << P.x() << ","
<< P.y() << ","
<< P.z() << ","
<< Q.w() << ","
<< Q.x() << ","
<< Q.y() << ","
<< Q.z() << ","
<< endl;
loop_path_file.close();
- 修改后
ofstream loop_path_file(VINS_RESULT_PATH, ios::app);
loop_path_file.setf(ios::fixed, ios::floatfield);
loop_path_file.precision(9);
loop_path_file << (*it)->time_stamp << " ";
loop_path_file.precision(5);
loop_path_file << P.x() << " "
<< P.y() << " "
<< P.z() << " "
<< Q.x() << " "
<< Q.y() << " "
<< Q.z() << " "
<< Q.w() << endl;
loop_path_file.close();
pose_graph.cpp文件中addKeyFrame()函数
- 修改前
ofstream loop_path_file(VINS_RESULT_PATH, ios::app);
loop_path_file.setf(ios::fixed, ios::floatfield);
loop_path_file.precision(0);
loop_path_file << cur_kf->time_stamp * 1e9 << ",";
loop_path_file.precision(5);
loop_path_file << P.x() << ","
<< P.y() << ","
<< P.z() << ","
<< Q.w() << ","
<< Q.x() << ","
<< Q.y() << ","
<< Q.z() << ","
<< endl;
loop_path_file.close();
- 修改后
ofstream loop_path_file(VINS_RESULT_PATH, ios::app);
loop_path_file.setf(ios::fixed, ios::floatfield);
loop_path_file.precision(9);
loop_path_file << cur_kf->time_stamp << " ";
loop_path_file.precision(5);
loop_path_file << P.x() << " "
<< P.y() << " "
<< P.z() << " "
<< Q.x() << " "
<< Q.y() << " "
<< Q.z() << " "
<< Q.w() << endl;
loop_path_file.close();
pose_graph_node.cpp中的main()函数
- 修改前
VINS_RESULT_PATH = VINS_RESULT_PATH + "/vio_loop.csv";
- 修改后
VINS_RESULT_PATH = VINS_RESULT_PATH + "/vio_loop.txt";
- 重新编译vins fusion(记得把之前编译的build和devel文件删除)
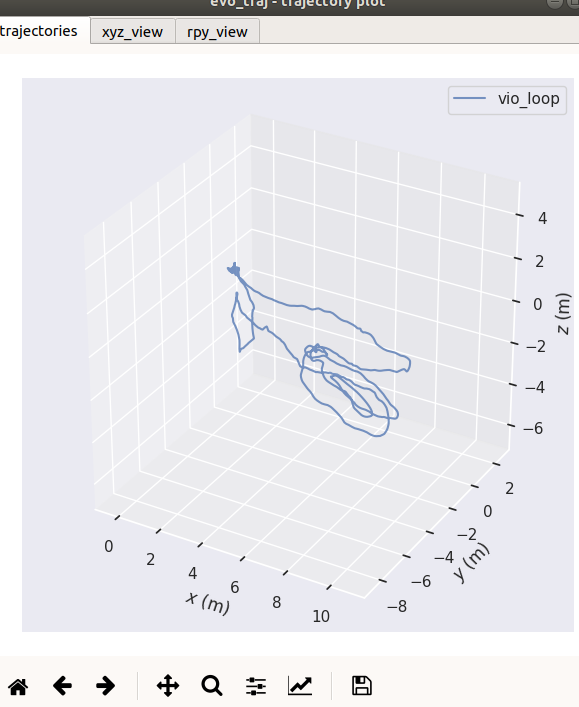
EVO绘制轨迹
- 重新运行vins fusion,运行完成后会看到在自己设置的目录下生成的文件
- 回环检测
evo_traj tum vio_loop.txt -p
- 非回环检测
evo_traj tum vio.csv -p
- 运行上面命令即可看到轨迹
真值的获取
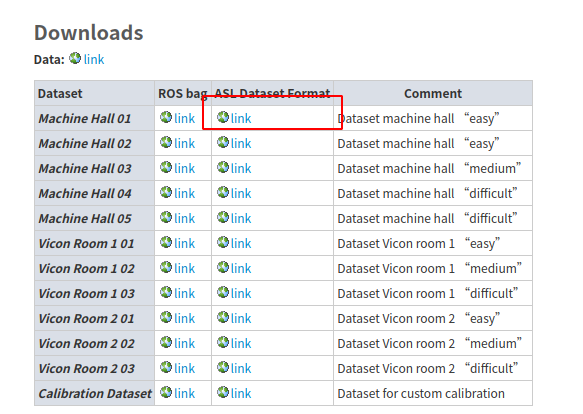
- 下载解压后在mav0/state_groundtruth_estimate0可以看到三个文件,其中data.csv就是真值文件,输入命令保存为tum格式
evo_traj euroc data.csv --save_as_tum
- 可用命令进行对比
evo_ape tum vins.csv data.tum -va -p
- 考虑平移部分得到的ape,单位为m
evo_ape tum data.tum vins_loop.csv -r trans_part -va --plot --plot_mode xyz
- 考虑旋转角得到的ape,单位弧度(rad)
evo_ape tum data.tum vins_loop.csv -r angle_rad -va --plot --plot_mode xyz
- 考虑旋转+平移
evo_ape tum data.tum vins_loop.csv -r full -va --plot --plot_mode xyz
















 9204
9204











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









