






在Ubuntu 18.04和ROS melodic环境下运行hdl-graph-slam算法框架遇到的问题和解决方法
参考hdl-graph-slam作者在readme文件下运行步骤,运行官方数据集不会出现问题,但建立3d点云地图后在运行提供的建图命令会出现下列报错
运行保存地图命令

报错代码

Unable to load type [hdl_graph_slam/SaveMap].原因是为设置环境路径系统无法定位该构架下的一些文件或操作在设置source devel/setup.bash之后又出现下列问题
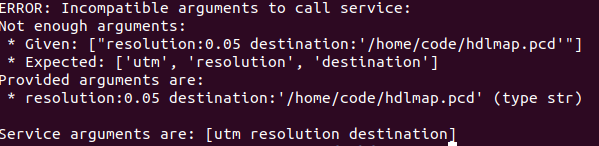
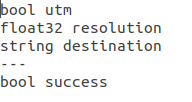
正如上面描述是因为命令没有提供完备的参数缺少utm参数,定位到框架后发现utm是一个bool型变量,utm变量类型在src/hdl_graph_slam/srv/SaveMap.srv里面
可以修改上述保存命令为
 至此解决了关于hdl_graph_slam建图无法保存的问题
至此解决了关于hdl_graph_slam建图无法保存的问题
但在运行自己录制的雷达数据包时如果只是修改了话题名发现不能建图成功出现下图报错
 这是因为在运行自己的数据包时需要将拥有的坐标系进行初始标定修改launch代码
这是因为在运行自己的数据包时需要将拥有的坐标系进行初始标定修改launch代码
 将坐标系初始定位标定在一起“state2base_publisher"是自己命名的订阅名,再次roslaunch挂起 将第一行的代码注释(不注释)也可以运行至此实现了hdl_graph_slam系统框架实现自己数据包的建图。
将坐标系初始定位标定在一起“state2base_publisher"是自己命名的订阅名,再次roslaunch挂起 将第一行的代码注释(不注释)也可以运行至此实现了hdl_graph_slam系统框架实现自己数据包的建图。
















 1251
1251











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









