







 超级会员免费看
超级会员免费看
车载激光雷达,又称车载三维激光扫描仪,是一种用于汽车环境感知的关键传感器。汽车激光雷达技术以其高精 度、高分辨率和快速反应能力,成 为自动驾驶领域的核心传感器之一。
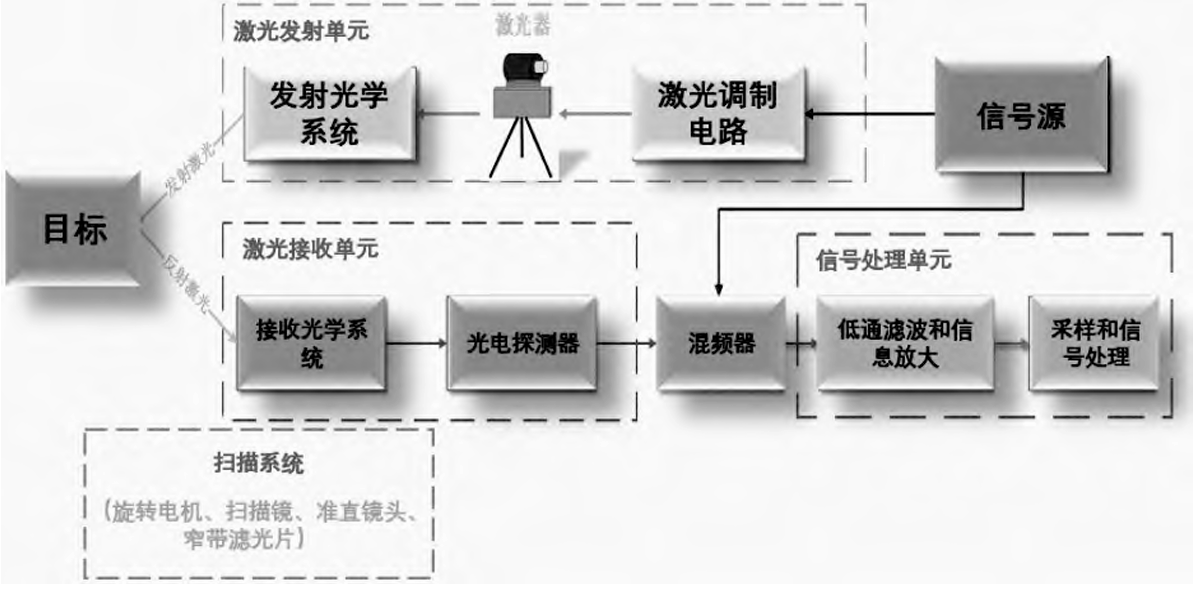
激光雷达通过发射激光脉冲并接收反射信号,从而精确测量周 围环境的距离和形状,生成周围环境高质量的三维点云数据并提供 给自动驾驶等系统,作为决策的依据之一。
一、激光雷达的工作原理
汽车激光雷达(LiDAR,Light Detection and Ranging是一种基于 激光测距技术的传感器,其主要工作原理是基于飞行时间(Time-of-Flight, ToF),通过测量从激光发射到返回的时间来计算物体的距离, 实现距离测量和环境感知。公式为:距离 = 光速 × 时间差 / 2。同时,通过扫描(机械旋转或固态扫描)获取周围环境的密集点云数据,进而形成高精度 3D 地图。
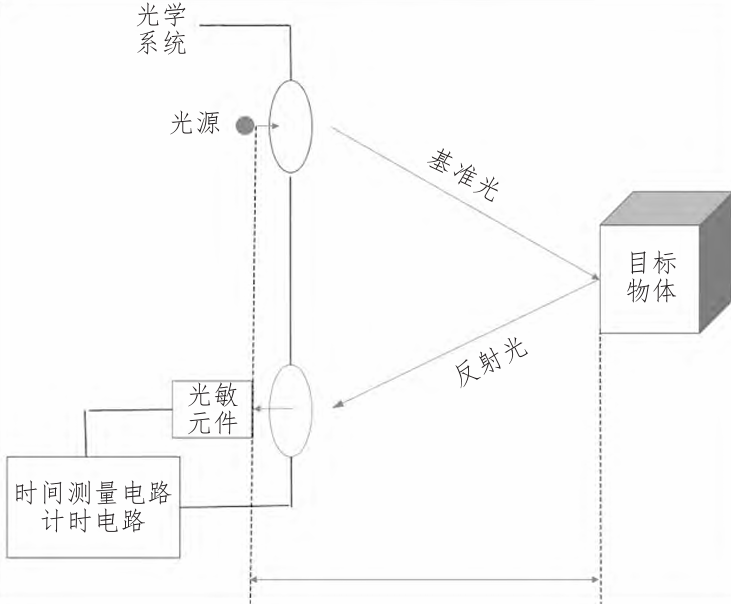
激光雷达的核心价值在于激光的高精 度测量能力,能够在短时间内收集 大量的空间数据,这一特性对自动驾驶技术的实现至关重要

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 1056
1056

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









