






 本文讨论了控制系统设计中鲁棒性的核心价值,特别是在机器人关节电机控制中,如何应对机械、电气噪声及环境变化带来的输入输出扰动。通过噪声整形函数和高通滤波器,实现对低频和高频噪声的有效管理,以保证机器人的稳定性和性能。
本文讨论了控制系统设计中鲁棒性的核心价值,特别是在机器人关节电机控制中,如何应对机械、电气噪声及环境变化带来的输入输出扰动。通过噪声整形函数和高通滤波器,实现对低频和高频噪声的有效管理,以保证机器人的稳定性和性能。
鲁棒性在控制系统设计中是至关重要的,因为实际的工程系统容易受到外部干扰和测量噪声的影响,而且在设计中使用的数学模型和实际中的实际系统之间总是存在差异。通常需要一个控制工程师设计一个控制器,使闭环系统稳定,并在存在干扰信号、噪声干扰、未建模的工厂动态和工厂参数变化的情况下达到一定的性能水平。
机器人关节电机控制的输入输出扰动/干扰是一个需要重点关注的问题。这些扰动/干扰可能来自多种来源,如机械结构的不完美、电气噪声、外部环境的变化等,它们会对电机的运动轨迹、速度和加速度等产生负面影响,从而影响到机器人的整体性能和稳定性。
根据位置噪声信号的谱密度来确定噪声整形函数Wn。在给定的情况下,将它作为高通滤波器!!!
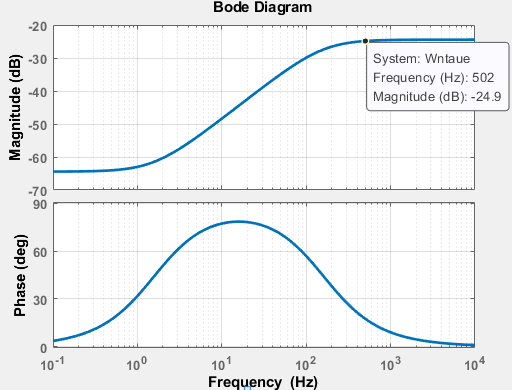
其输出具有在500 Hz以上的显著频谱内容。对于该整形滤波器,位置噪声信号在低频范围仅为0.6 mV,但在高频范围为60 mV,对应于轨道宽度的5%。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









