






- 坐标
分类:
1维:数组
2维:2D坐标系(X轴,Y轴)
3维:3D坐标系(X轴,Y轴,Z轴){左手坐标系,右手坐标系}
应用:
世界坐标系(全局坐标):是一个特殊的坐标系,它建立了描述其他坐标系所需要的参考框架。从另一方面说,能够用世界坐标系描述其他坐标系的位置,而不能用更大的、外部的坐标系来描述世界坐标系。
物体坐标系(局部坐标):物体坐标系是和特定物体相关联的坐标系,每个物体都有它们独立的坐标系,当物体移动或改变方向时,和该物体相关联的坐标系将随之移动或改变方向。
摄像机坐标系:摄像机坐标系是和观察者密切相关的坐标系。摄像机坐标系和屏幕坐标系相似,差别在于摄像机坐标系处于 3D 空间中而屏幕坐标系在 2D 平面里。摄像机坐标系能被看作是一种特殊的“物体”坐标系,该“物体”坐标系就定义在摄像机的屏幕可视区域,摄像机坐标系中,摄像机在原点,x轴向右,z轴向前(朝向屏幕内或摄像机方向),y轴向上(不是世界的上方而是摄像机本身的上方)。
惯性坐标系:为了简化世界坐标系到物体坐标系的转换,人们引入了一种新的坐标系,称作惯性坐标系,意思是在世界坐标系到物体坐标系的“半途”,惯性坐标系的原点和物体坐标系的原点重合,但惯性坐标系的轴平行于世界坐标系的轴。(从物体坐标系转换到惯性坐标系只需旋转,从惯性坐标系转换到世界坐标系只需要平移。分开考虑着两件事比把它们糅合在一起容易得多)
- 向量
定义:
1、类似于数组
2、可以有任意正数维
3、是终点位置减起点位置得到的
4、可以理解为没有位置,只有方向和大小的有向线段(大小为长度(模),方向为指向)
5、每一个维度都是0的向量被称为“零向量”,表达的是“没有位移”
6、只要大小和方向相等被称为“相等向量”
7、模长为1的向量被称为“单位向量”
8、大小相等,方向相反的向量被称为“相反向量”
运算:
| A+B=B+A | 向量加法交换律 |
| A-B=A+(-B) | 向量减法定义 |
| (A+B)+C=A+(B+C) | 向量加法结合律 |
| A(BC)=(AB)C | 标量乘法结合律 |
| K(A+B)=KA+KB | 标量乘法对向量加法的分配率 |
| ||KA||=|K| ||A|| | 向量乘以标量相当于以标量的绝对值乘以每一个分量 |
| ||A||>=0 | 向量的大小非负 |
| ||A+B||2=||A||2+||B||2 | 勾股定理在向量加法中的应用 |
| ||A||+||B||>=||A+B|| | 向量加法的三角形法则 |
| A.B=B.A | 点乘交换律 |
| ||A||=根号A.A | 点乘定义向量大小 |
| K(A.B)=(KA).B=A.(KB) | 标量乘法对点乘结合律 |
| A.(B+C)=A.B+A.C | 点乘对向量加减法分配率 |
| AXA=0 | 任何向量与自身的叉乘等于零向量 |
| AXB=-(BXA) | 叉乘逆交换律 |
| AXB=(-A)X(-B) | 叉乘的操作数同时变负,结果相同 |
| K(AXB)=(KA)XB=AX(KB) | 标量乘法对叉乘结合律 |
| AX(B+C)=AXB+AXC | 叉乘对向量加法分配率 |
| A.(AXB)=0 | 向量与另一向量的叉乘再点乘改向量本身等于0 |
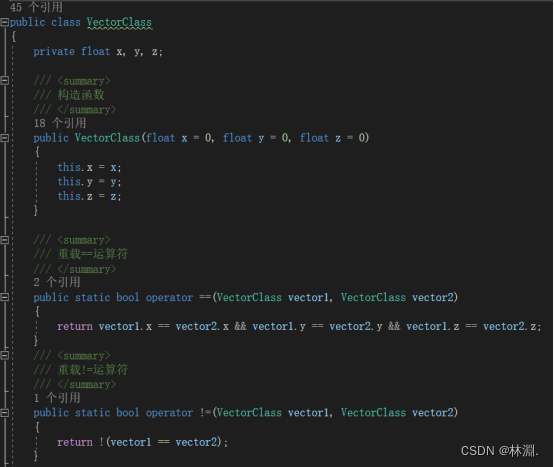
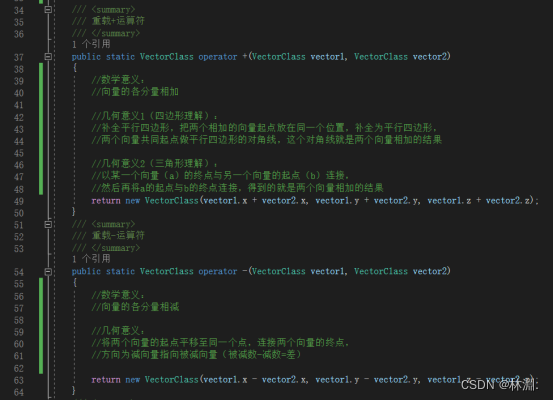
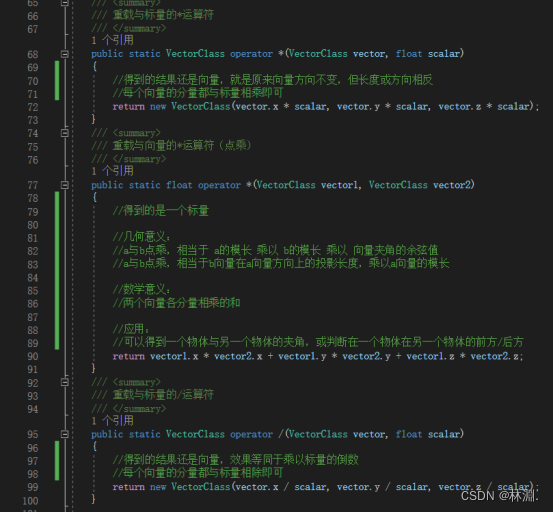
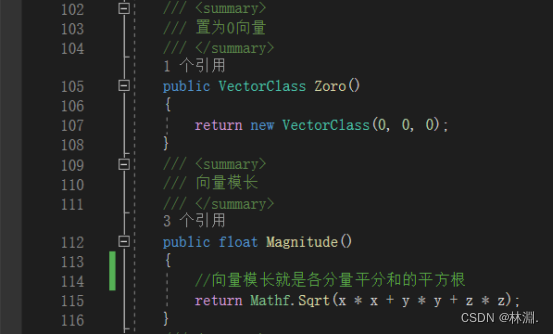
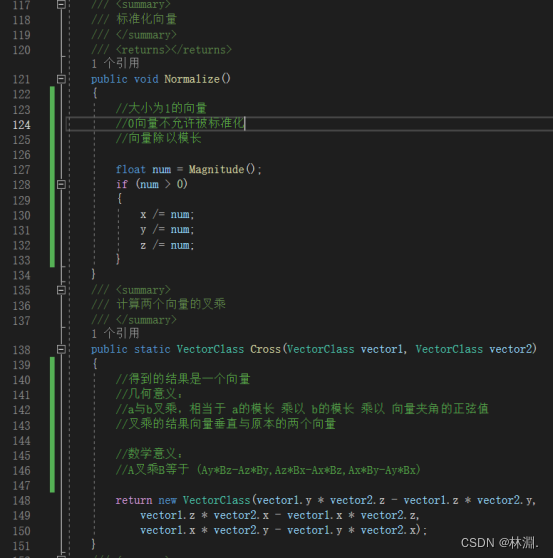
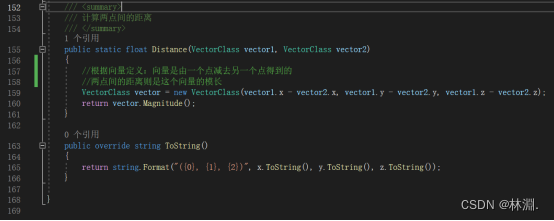
Vector类实现及其运算解释:
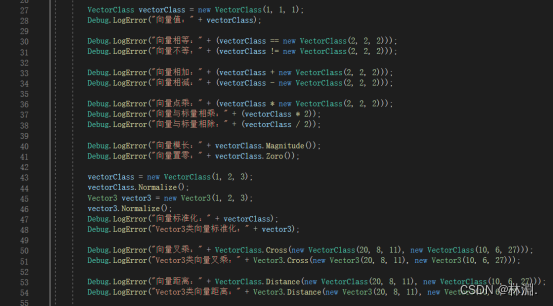
Vector类测试:















 1915
1915











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









