






目录
下面是关于利用时间API的C++代码,执行之前请记得创建功能包,在src文件夹下创建C++文件
1.时刻
获取时刻&设置指定时刻
//获取时刻
ros::init(argc,argv,"hello_time");
ros::NodeHandle nh;//必须创建句柄,否则时间没有初始化,导致后续API调用失败
ros::Time right_now = ros::Time::now();//将当前时刻封装成对象
ROS_INFO("当前时刻:%.2f",right_now.toSec());//获取距离 1970年01月01日 00:00:00 的秒数
ROS_INFO("当前时刻:%d",right_now.sec);//获取距离 1970年01月01日 00:00:00 的秒数
//设置指定时间
ros::Time someTime(100,100000000);// 参数1:秒数 参数2:纳秒
ROS_INFO("时刻:%.2f",someTime.toSec()); //100.10
ros::Time someTime2(100.3);//直接传入 double 类型的秒数
ROS_INFO("时刻:%.2f",someTime2.toSec()); //100.30
运行效果:

2.持续时间
设置一个时间区间(间隔):
ROS_INFO("当前时刻:%.2f",ros::Time::now().toSec());
ros::Duration du(10);//持续10秒钟,参数是double类型的,以秒为单位
du.sleep();//按照指定的持续时间休眠
ROS_INFO("持续时间:%.2f",du.toSec());//将持续时间换算成秒
ROS_INFO("当前时刻:%.2f",ros::Time::now().toSec());
效果展示:

3.持续时间与时刻运算
为了方便使用,ROS中提供了时间与时刻的运算:
ROS_INFO("时间运算");
ros::Time now = ros::Time::now();
ros::Duration du1(10);
ros::Duration du2(20);
ROS_INFO("当前时刻:%.2f",now.toSec());
//1.time 与 duration 运算
ros::Time after_now = now + du1;
ros::Time before_now = now - du1;
ROS_INFO("当前时刻之后:%.2f",after_now.toSec());
ROS_INFO("当前时刻之前:%.2f",before_now.toSec());
//2.duration 之间相互运算
ros::Duration du3 = du1 + du2;
ros::Duration du4 = du1 - du2;
ROS_INFO("du3 = %.2f",du3.toSec());
ROS_INFO("du4 = %.2f",du4.toSec());
//PS: time 与 time 不可以运算
// ros::Time nn = now + before_now;//异常效果展示:

ps:时刻与时刻之间可以相减,但不能相加
4.设置运行频率
ros::Rate rate(1);//指定频率
while (true)
{
ROS_INFO("-----------code----------");
rate.sleep();//休眠,休眠时间 = 1 / 频率。
}效果展示:

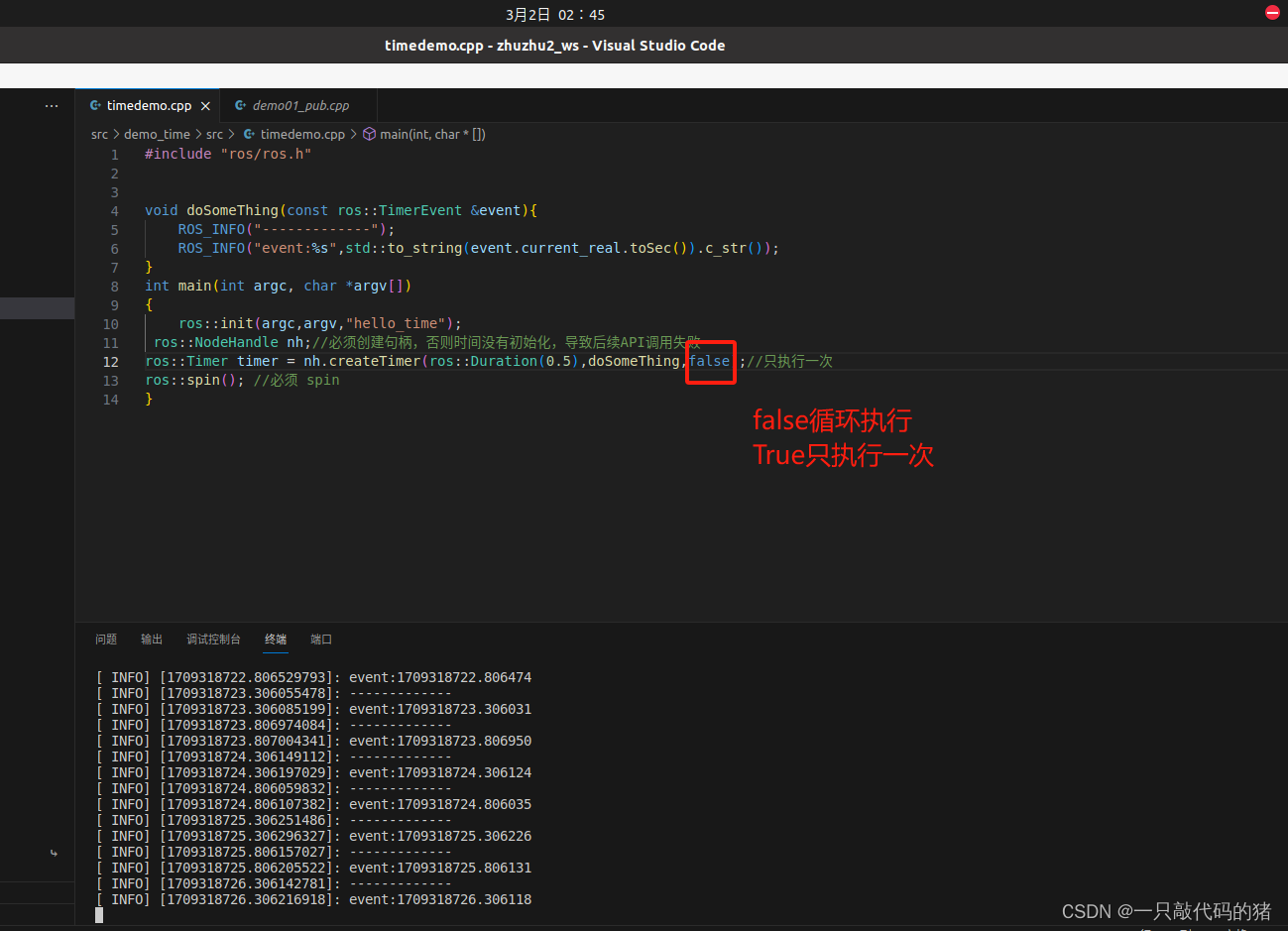
5.定时器
ROS 中内置了专门的定时器,可以实现与 ros::Rate 类似的效果:
ROS定时器实现逻辑:
1)创建一个定时器,按照指定频率调用回调函数
2)参数设置
/Timer createTimer(Duration period, const TimerCallback& callback, bool oneshot = false,
// bool autostart = true) const;* \param period 时间间隔
* \param callback 回调函数
* \param oneshot 如果设置为 true,只执行一次回调函数,设置为 false,就循环执行。
* \param autostart 如果为true,返回已经启动的定时器,设置为 false,需要手动启动。代码如下:
ros::NodeHandle nh;//必须创建句柄,否则时间没有初始化,导致后续API调用失败
ros::Timer timer = nh.createTimer(ros::Duration(0.5),doSomeThing,true);//只执行一次
ros::spin(); //必须 spin定时器的回调函数:
void doSomeThing(const ros::TimerEvent &event){
ROS_INFO("-------------");
ROS_INFO("event:%s",std::to_string(event.current_real.toSec()).c_str());
}效果展示(只执行一次):

效果展示(循环执行):
 注意:
注意:
1.文件运行时候配置环境
2.别忘记启动roscore(这是rosmaster)















 2729
2729











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









