







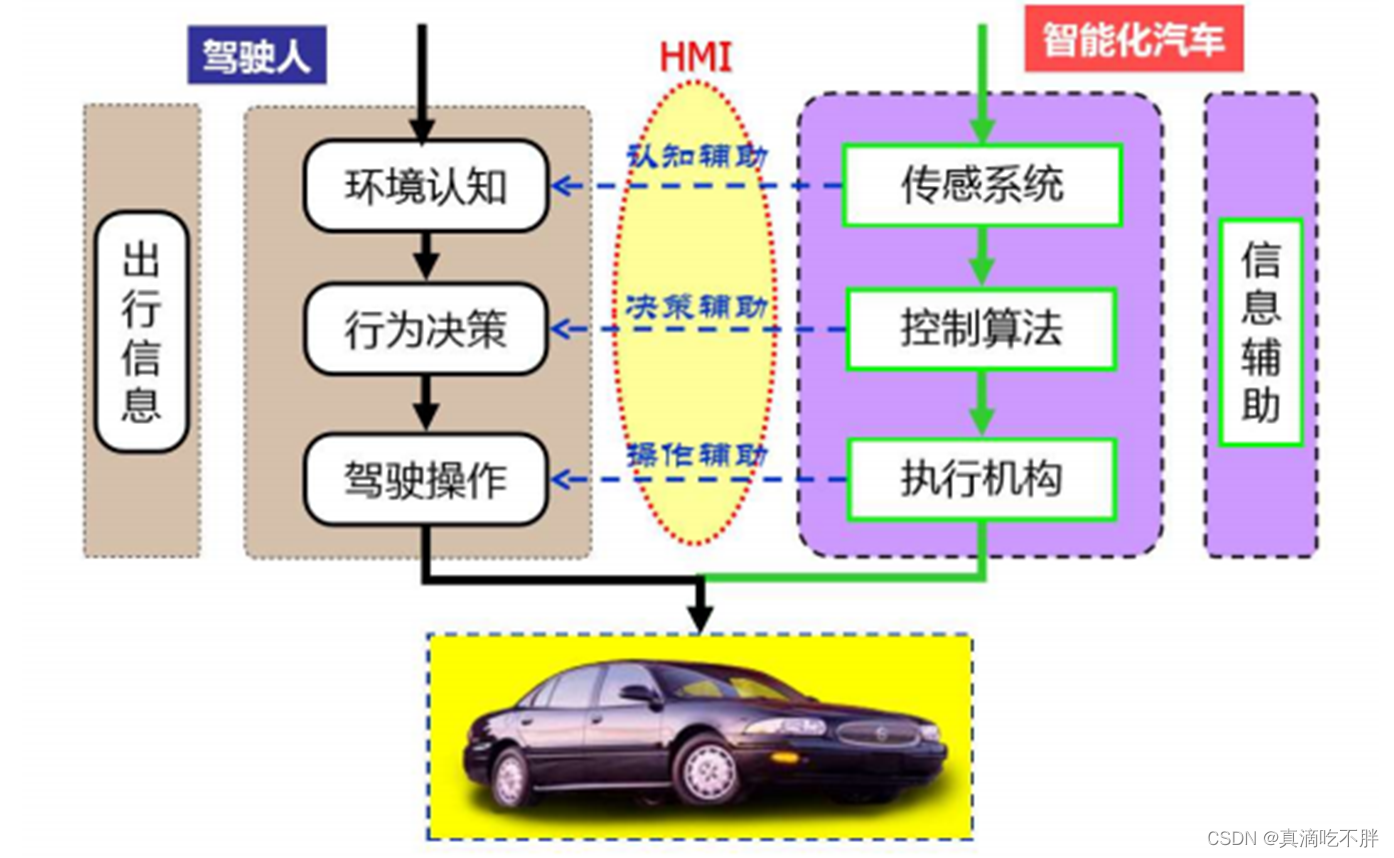
什么是无人驾驶汽车?
在普通汽车的基础上增加先进的传感器(雷达、摄像头等)、控制器、执行器等装置,通过车载传感系统和信息终端实现车与X(人、车、路、云等)智能信息交换,具备智能的环境感知能力,能够自动地分析汽车行驶的安全及危险状态,按照人的意志到达目的地,最终实现替代人来操作的新一代汽车
前言
智能网联汽车及自动驾驶技术的辐射效益:
-
交通安全
交通事故可降低至目前的1% -
交通效率
车联网技术可提高道路通行效率10% -
节能减排
协同式交通系统可提高自车燃油经济性20%-30% -
创新驱动
搭建公共平台,促进跨行业的协同创新 -
产业带动
拉动机械、电子、通信、互联网等相关产业快速发展 -
国防应用
无人驾驶战斗车辆 -
生活方式
减轻驾驶负担、车辆共享、便捷出行、娱乐
提示:以下是本篇文章正文内容,下面案例可供参考
一、无人驾驶工作原理
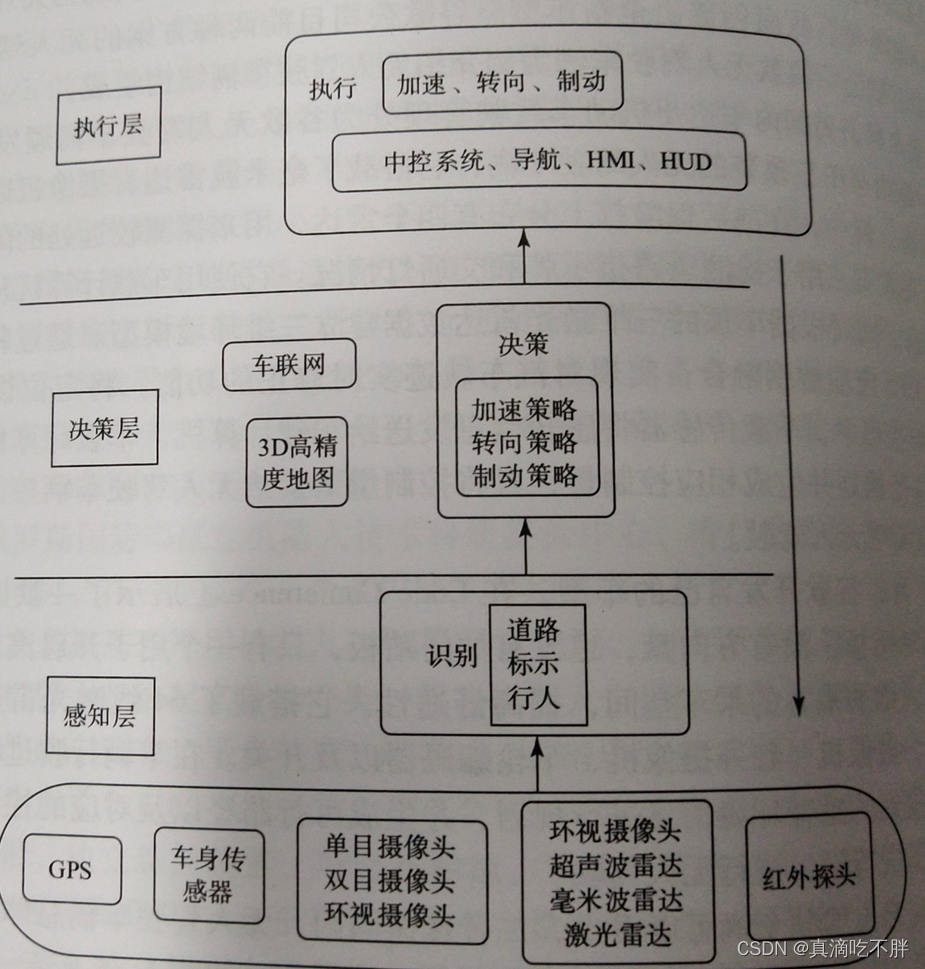
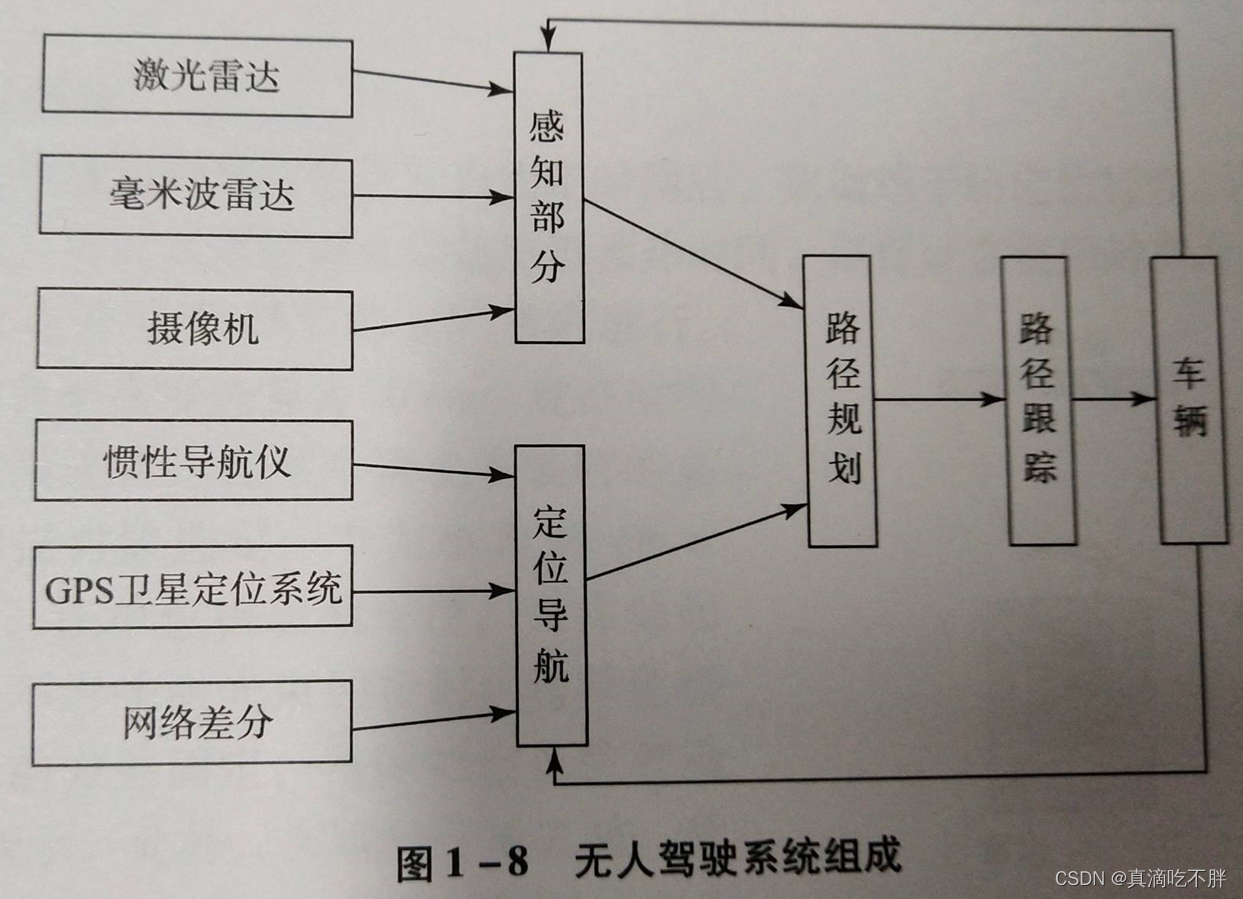
无人驾驶的关键技术包括
感知:激光、雷达、超声波、视觉相机等
高精度地图:周围环境及地形的高精度建模(10cm)
控制规划及决策:对汽车进行智能控制
二、路径规划介绍
1.概念
路径规划(Path Planning) 是指在具有障碍物的环境中,按照一定的评价标准,比如路径长度最短或能量消耗最少原则等,寻找一条从起始状态到目标状态的无碰撞路径。
在评价规划算法时,我们需要考虑完备性、概率完备性、最优性、渐进最优性。
- 完备性:是指如果在起始点和目标点间有路径解存在,那么一定可以得到解,如果得不到解那么一定说明没有解存在;
- 概率完备性:是指如果在起始点和目标点间有路径解存在,只要规划或搜索的时间足够长,就一定能确保找到一条路径解;
- 最优性:是指规划得到的路径在某个评价指标上是最优的(评价指标一般为路径的长度);
- 渐进最优性:是指经过有限次规划迭代后得到的路径是接近最优的次优路径,且每次迭代后都与最优路径更加接近,是一个逐渐收敛的过程。
路径规划需要解决的问题是:
- 始于起始点止于终点
- 避障
- 尽可能优化路径
路径规划目前的研究
- 轨迹优化:样条插值,多项式插值等平滑方法
- 未知环境下的路径规划
- 动态环境下的路径规划
- 三维路径规划
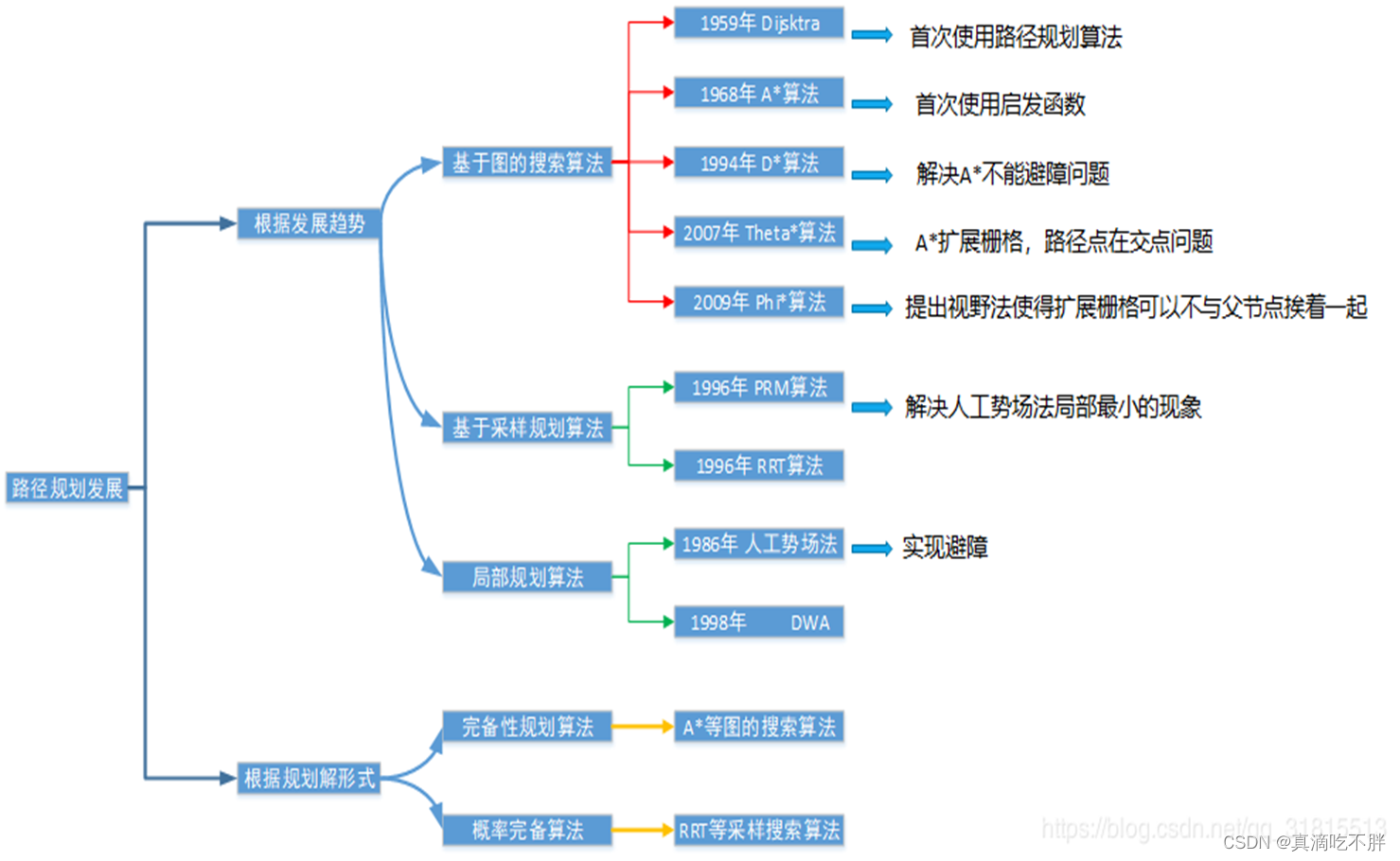
2.已有算法一览
按照各种算法发现先后时序及算法基本原理,将路径规划算法大致分为四类:传统算法、图形学的方法、智能仿生学算法、其他算法。
(1)传统算法
包括模拟退火算法、人工势场法、模糊逻辑算法、禁忌搜索算法等。
模拟退火算法是通过赋予搜索过程一种时变且最终趋于零的概率突跳性,从而可有效避免陷入局部极小并最终趋于全局最优的串行结构的优化算法。
为了找到“全局最优解”,就不应该执着于某一个特定的区域。局部搜索的缺点就是太贪婪地对某一个局部区域以及其邻域搜索,导致一叶障目,不见泰山。
禁忌搜索就是对于找到的一部分局部最优解,有意识地避开它(但不是完全隔绝),从而获得更多的搜索区间。打个比方,兔子们找到了泰山,它们之中的一只就会留守在这里,其他的再去别的地方寻找。就这样,一大圈后,把找到的几个山峰一比较,珠穆朗玛峰脱颖而出。
(2)图形学的方法
C空间法、栅格法、自由空间法、voronoi图法等。
传统算法在解决实际问题时往往存在着建模难的问题,图形学的方法则提供了建模的基本方法,但是图形学的方法普遍存在着搜索能力的不足,往往需要结合专门的搜索算法。
(3)智能仿生学算法
包括蚁群算法、神经网络算法、粒子群算法、遗传算法等。
粒子群优化算法(Particle Swarm optimization,PSO)又翻译为粒子群算法、微粒群算法、或微粒群优化算法。是通过模拟鸟群觅食行为而发展起来的一种基于群体协作的随机搜索算法。
遗传算法(Genetic Algorithm)是模拟达尔文生物进化论的自然选择和遗传学机理的生物进化过程的计算模型,是一种通过模拟自然进化过程搜索最优解的方法。
(4)其他算法
不做描述。
3.其他分类
根据对环境信息的把握程度分
- 基于先验完全信息的全局路径规划
- 基于传感器信息的局部路径规划
从获取障碍物信息是静态或是动态的角度分
- 全局路径规划属于静态规划(又称离线规划)
- 局部路径规划属于动态规划(又称在线规划)
根据所研究环境的信息特点分
- 离散域范围内的路径规划问题
- 连续域范围内的路径规划问题
4.流程
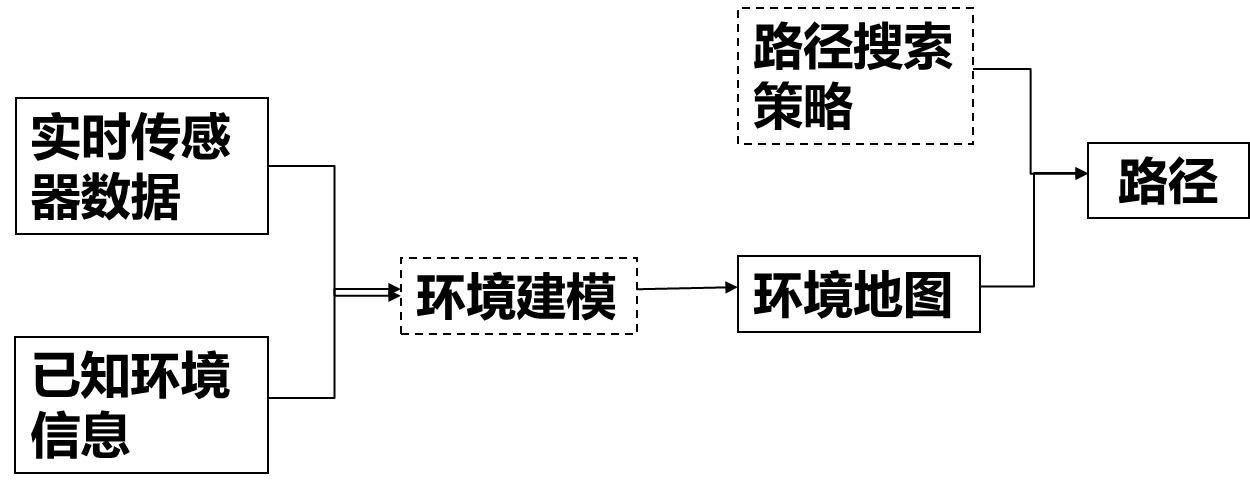
- 环境建模:建立一个便于计算机进行路径规划所使用的环境模型,即将实际的物理空间抽象成算法能够处理的抽象空间,实现相互间的映射。
- 路径搜索:路径搜索阶段是在环境模型的基础上应用相应算法寻找一条行走路径,使预定的性能函数获得最优值。
- 路径平滑:通过相应算法搜索出的路径并不一定是一条运动体可以行走的可行路径,需要作进一步处理与平滑才能使其成为一条实际可行的路径。
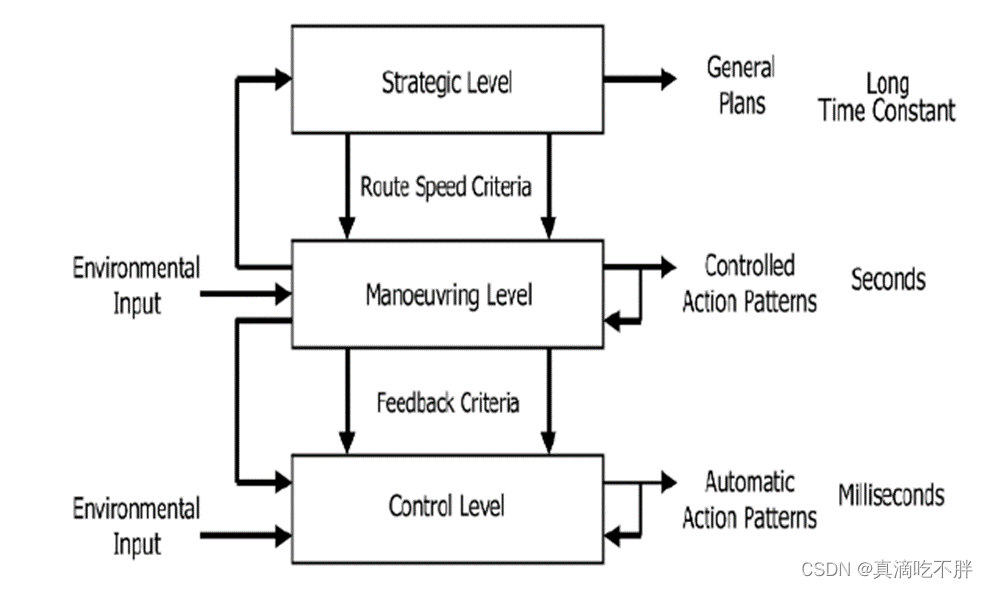
三、行为决策
对于驾驶员在驾驶车辆的过程中的功能分解,可以分为战略层、战术层和操作层。
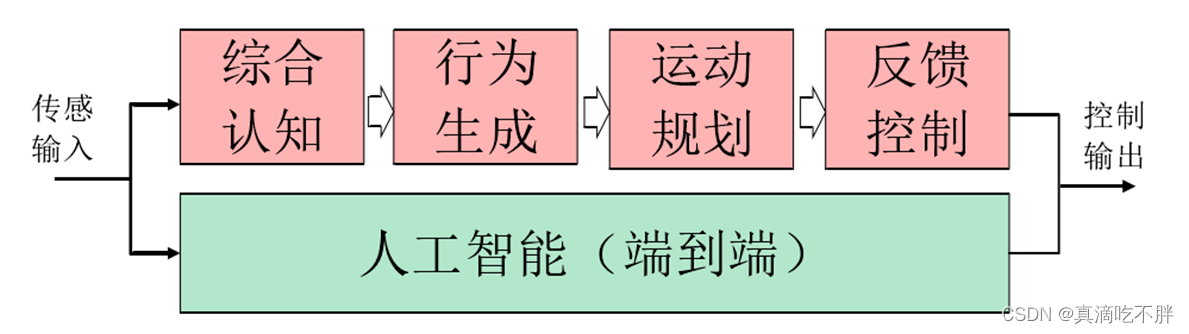
智能汽车当前采用的决策系统通常包含两种方法,分别为基于机理的决策控制系统和基于人工智能(端到端)的决策控制系统。
- 基于机理的决策控制模型将智能汽车的决策过程分为几个不同的部分,并对每个部分根据机理建模,实现智能汽车的决策和控制。
- 基于人工智能的算法,特别是端到端的方法,采用一个多层神经网络进行决策控制,实现从传感输入到通过神经网络直接控制输出。
声明
本人所有文章仅为个人学习记录,若有侵权,联系立删。














 2589
2589











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









