







昨天做了一个简答的小实验,我感觉挺有意思的跟大家分享一下。
我用了按键控制mg90s数字舵机,前不久一直研究模拟舵机,数字舵机与模拟舵机的控制方式是一样的pwm时序。
数字舵机接线方面:
与模拟舵机一样红线接vcc,棕线接GND,黄线接定义的板子引脚。
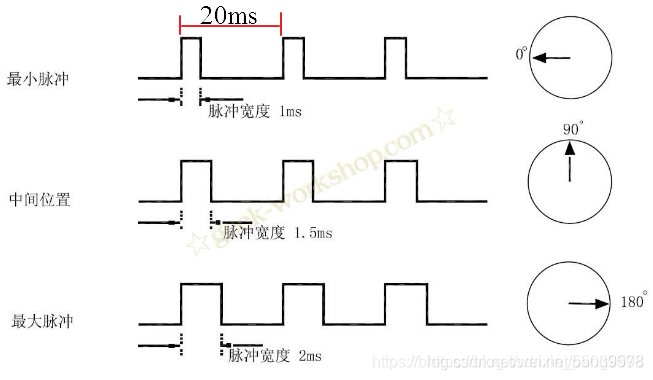
具体的对应角度如图所示:
我的板子引脚规定是
舵机信号线接PB5,key0引脚是PC5,key1引脚是PA15
在这里大家看一下我的程序:
main.c
#include "led.h"
#include "delay.h"
#include "sys.h"
#include "key.h"
#include "timer.h"
#include "usart.h"
int main(void)
{
u8 t=0;
delay_init(); //延时函数初始化
LED_Init(); //初始化与LED连接的硬件接口
KEY_Init(); //初始化与按键连接的硬件接口
LED0=0; //点亮LED
u16 pwm_val=0;
TIM3_PWM_Init(199, 7199);//50hz
while(1)
{
if(KEY1==0)
{
pwm_val=190;//45
TIM_SetCompare2(TIM3,pwm_val);
delay_ms(2000);
pwm_val=195;//0
TIM_SetCompare2(TIM3,pwm_val);
}
else if(KEY0==0)
{
pwm_val=185;//90
TIM_SetCompare2(TIM3,pwm_val);
delay_ms(2000);
pwm_val=195;//0
TIM_SetCompare2(TIM3,pwm_val);
}
else if(WK_UP==0)
{
pwm_val=180;//45
TIM_SetCompare2(TIM3,pwm_val);
delay_ms(2000);
pwm_val=195;//0
TIM_SetCompare2(TIM3,pwm_val);
}
}
}
/**************************************
PB5——PWM信号线(黄线)
+5v——+5v(红线)
GND——GND(棕线)
0度——195
45度——190
90度——185
135度——180
180度——175
**************************************/














 1197
1197











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









