







系列文章目录
第一章 ROS命令行工具
第二章 创建工作空间与功能包
第三章 发布者Publisher的编程实现
文章目录
话题模型
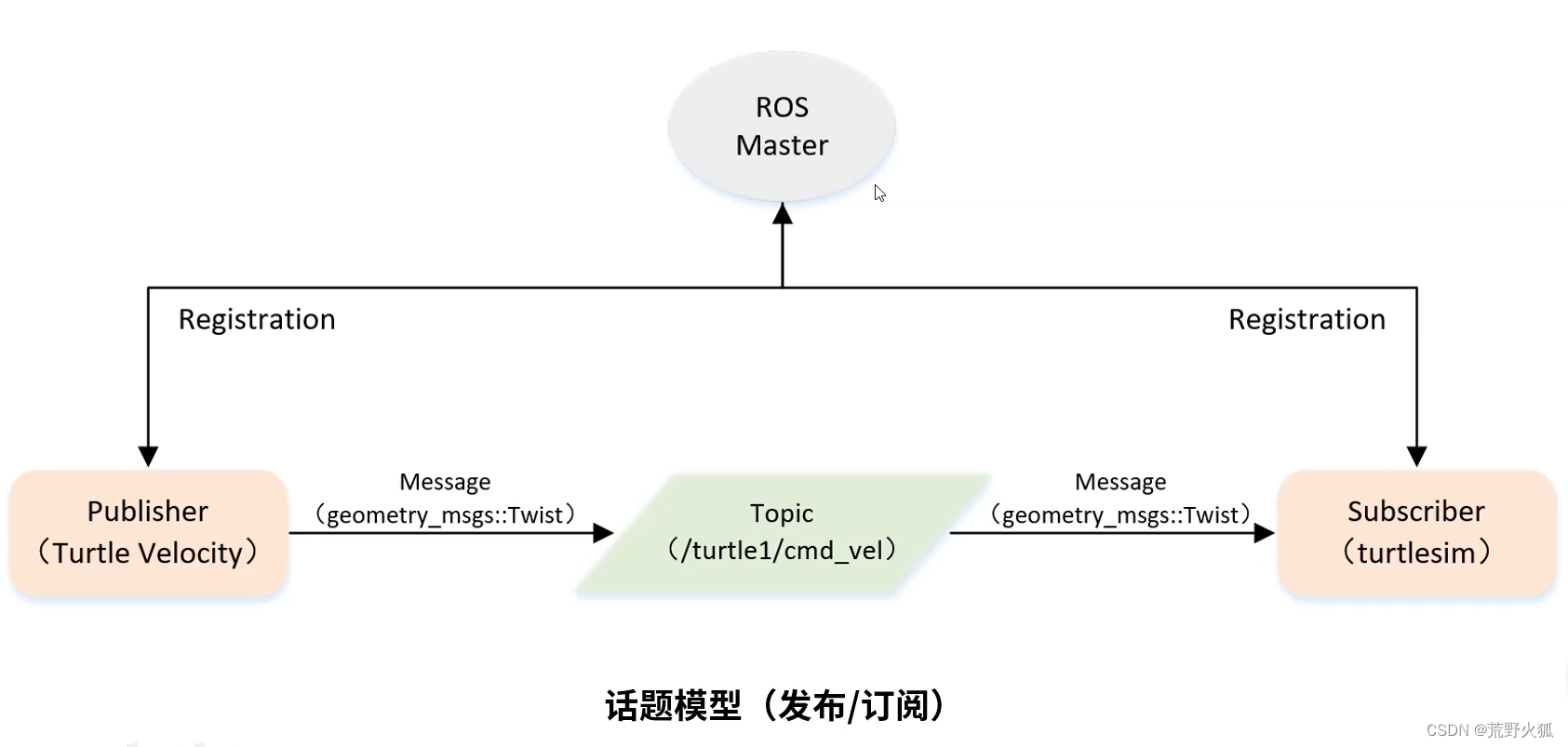
Publisher发布者发布Message海龟速度,通过Topic的传输管道传递给Subscriber
第一步,创建功能包

cd ~/catkin_ws/src
catkin_create_pkg learing_topic roscpp rospy std_msgs geometry_msgs turtlesim
包括turtle 的消息所依赖的包geometry_msgs 还有小海龟仿真器turtlesim
如何实现一个发布者
包含库
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
初始化ROS节点
ros::init
ros是名称空间, NodeHandle、Publisher是ros中的类,argc argv是带参数的cpp main函数写法 编译时可以传入参数argc是参数数量 argv是参数指针 一般可以是string
// ROS节点初始化
ros::init(argc, argv, "velocity_publisher");
前两个属性默认不用配置,其中第三个参数为节点名
向ROS Master 注册节点信息,包括发布的话题名和话题中的消息类型
ros::NodeHandle
句柄
句柄主要管理rosAPI的资源的,后面发布者创建一系列api调用,都是用节点句柄来调用的。这相当于创建一个节点对象,然后对这个节点对象进行初始化设置。
1
ros::init(argc, argv, "node_name"); // node name
ros::NodeHandle n; //n 命名空间为/node_namespace
这使得使用该句柄的任何相对名字都是相对<node_namespace>
ros::Publisher map_publisher_ = n.advertise<nav_msgs::OccupancyGrid>("map", 1, true);
上例子会发布节点<node_name>的话题/map,nav_msgs::OccupancyGrid为消息类型,
注:这里的<node_name>就相当于<node_namespace> + nodename
2
ros::init(argc, argv, "node_name"); // node name
ros::NodeHandle n("~"); //n 命名空间为/node_namespace/node_name
ros::Publisher map_publisher_ = n.advertise<nav_msgs::OccupancyGrid>("map", 1, true);
上例子会发布节点<node_name>的话题/node_name/map
注:这里的<node_name>就相当于<node_namespace> + nodename
// 创建节点句柄
ros::NodeHandle n;
// 创建一个Publisher,发布名为/turtle1/cmd_vel的topic,消息类型为geometry_msgs::Twist,队列长度10
ros::Publisher turtle_vel_pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 10);
turtle1/cmd_vel是小乌龟功能包的订阅话题,所以要发布到这个话题里,advertise(打广告,公布)。
这个话题是控制海龟运动用的话题,这是系统有一个订阅者会订阅这个消息控制海龟。
// 设置循环的频率
ros::Rate loop_rate(10);
创建消息数据
创建geometry_msgs::Twist类的对象vel_msg
vel_msg.linear.x 线速度
vel_msg.angular.z角速度
// 初始化geometry_msgs::Twist类型的消息
geometry_msgs::Twist vel_msg;
vel_msg.linear.x = 0.5;
vel_msg.angular.z = 0.2;
// 发布消息
turtle_vel_pub.publish(vel_msg);
ROS_INFO("Publsh turtle velocity command[%0.2f m/s, %0.2f rad/s]",
vel_msg.linear.x, vel_msg.angular.z);
按照一定频率循环发送消息
相当于终端里 -r 10 设置10hz 频率
// 设置循环的频率
ros::Rate loop_rate(10);
延时 1/10s 相当于100ms的时间
// 按照循环频率延时
loop_rate.sleep();
::
::是解引用,表示指定特定命名空间或者类中(统称为作用域)的特定内容,其中::前面的是作用域,后面的是作用域的特定内容,可以是函数也可以是变量
源码
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************/
/**
* 该例程将发布turtle1/cmd_vel话题,消息类型geometry_msgs::Twist
*/
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
int main(int argc, char **argv)
{
// ROS节点初始化
ros::init(argc, argv, "velocity_publisher");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个Publisher,发布名为/turtle1/cmd_vel的topic,消息类型为geometry_msgs::Twist,队列长度10
ros::Publisher turtle_vel_pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 10);
// 设置循环的频率
ros::Rate loop_rate(10);
int count = 0;
while (ros::ok())
{
// 初始化geometry_msgs::Twist类型的消息
geometry_msgs::Twist vel_msg;
vel_msg.linear.x = 0.5;
vel_msg.angular.z = 0.2;
// 发布消息
turtle_vel_pub.publish(vel_msg);
ROS_INFO("Publsh turtle velocity command[%0.2f m/s, %0.2f rad/s]",
vel_msg.linear.x, vel_msg.angular.z);
// 按照循环频率延时
loop_rate.sleep();
}
return 0;
}
在功能包的src下写cpp文件
配置发布者代码编译规则
如何配置CMakeLists.txt的编译规则
- 设置需要编译的代码和生成的可执行文件;
- 设置链接库
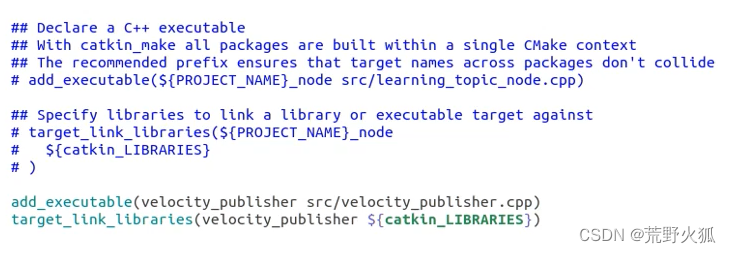
把src/velocity_publisher.cpp这里的cpp转成可执行文件velocity_publisher,
把velocity_publisher的可执行文件和ros里的库座链接的
add_executable(velocity_publisher src/velocity_publisher.cpp)
target_link_libraries(velocity_publisher ${catkin_LIBRARIES})
编译并运行
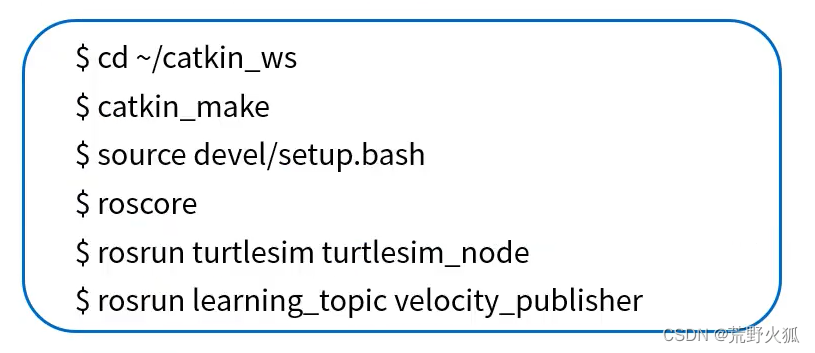
避免每次运行souce devel/setup.bash打开主文件,ctrl+H显示隐藏文件,再打开.bashrc
在最后一行写上自己路径下的setup.bash
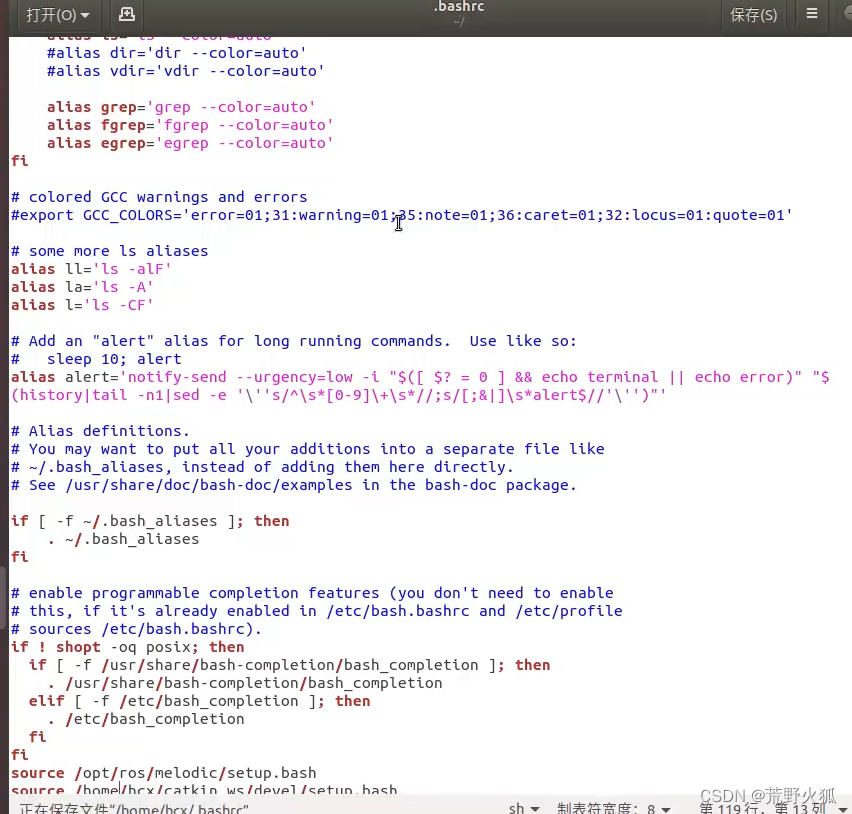
最后重启一下终端就可以不用每次运行了
结果

编译的可执行文件(velocity_publisher)在catkin_ws/devel/lib/learning_topic 里















 564
564











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









