







paper:https://arxiv.org/pdf/2412.04431
一、 Introduction
1、背景与挑战:
视觉生成技术近年来取得了快速进展,实现了高质量、高分辨率的图像与视频合成。文本到图像生成是其中最具挑战性的任务之一,因为它需要复杂的语言理解和精确的场景构建。目前,视觉生成主要分为两种方法:扩散模型(Diffusion Models) 和 自回归模型(AutoRegressive Models)。
(1)扩散模型(Diffusion Models)
- 扩散模型通过反转数据向随机噪声的正向路径进行训练,通过连续的去噪过程生成图像。
- 这类模型在生成高质量图像方面表现出色,能够逐步改善图像细节。
(2)自回归模型(AutoRegressive Models)
- 自回归模型借鉴了语言模型的扩展能力和泛化能力,通过视觉标记器(visual tokenizer)将图像转换为离散标记(tokens),并通过下一个标记预测或下一个尺度预测的方式进行图像生成。
- 但是自回归模型具有以下问题:重建质量不足:使用离散标记时,重建图像的质量低于连续标记。缺乏细节:生成的视觉内容细节不如扩散模型丰富。生成效率低:由于采用逐步光栅扫描(raster-scan)进行标记预测,生成延迟较高。
(3)视觉自回归建模(VAR)
- VAR(Visual AutoRegressive)最近重新定义了图像上的自回归学习,将其视为粗到细的“下一个尺度预测”(next-scale prediction)。
- 与扩散模型相比,VAR 在泛化能力和扩展能力上表现出色,且所需的生成步骤更少。VAR 能够利用大型语言模型(LLMs)的扩展能力,并在细化前一步预测时受益于扩散模型的优势。
(4)VAR的挑战
- 量化误差:自回归模型中的索引式离散标记器(index-wise discrete tokenizer)存在严重的量化误差,特别是在高分辨率图像的重建中难以捕捉细节。
- 监督模糊:索引标记在生成阶段容易产生模糊监督,导致图像细节丢失和局部扭曲。
- 训练与测试分布差异:由于自回归模型依赖于教师强制训练(teacher-forcing),在测试时累积误差放大,进一步影响视觉细节质量。
2、主要贡献:
提出了一种称为二进制建模(Bitwise Modeling)的新方法,通过全流程使用二进制标记取代传统的索引式标记。这个二进制建模框架由三个核心模块组成:二进制视觉标记器(Bitwise Visual Tokenizer)、二进制无限词汇表分类器(Bitwise Infinite-Vocabulary Classifier)和二进制自纠错机制(Bitwise Self-Correction)。
(1)比特级建模(Bitwise Modeling):
核心改进在于用比特级标记替代索引级标记。传统方法中,大词汇表的离散标记需要一个整数索引表示,这种方式在词汇表扩展时会带来优化和计算上的挑战。通过将大整数分解为二进制比特,模型可以直接操作比特级标记,从而显著降低复杂度。
(2)分词器词汇表扩展(Vocabulary Expansion):
Infinity 的词汇表大小达到了 ,远超以往的自回归模型。这种超大规模词汇表不仅能够细化视觉表示,还能实现接近连续分词器的性能(如 VAEs)。
(3)比特级自纠正(Bitwise Self-Correction):
模型通过随机翻转部分比特来模拟预测错误,并重新量化残差特征,增强了系统的自我纠正能力。这种机制提高了模型的鲁棒性,使其能更好地适应不确定性。如图所示,本文将传统的令牌预测从一个大整数转换为二进制位,在一个按位无限词汇分类器中,以解决优化和计算挑战,使视觉自回归模型中的大量词汇学习成为可能。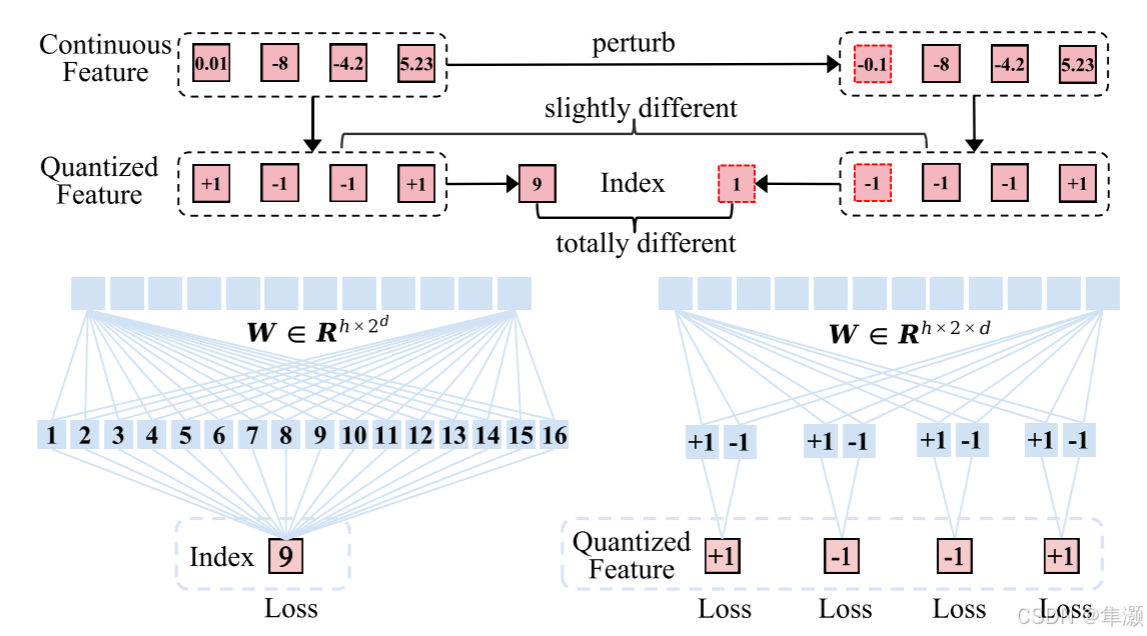
左侧:传统分类器(Conventional Classifier)
- 传统分类器直接预测索引(index labels),其索引的范围为
,即 d 位二进制表示的所有可能组合。
- 示例:如果 d = 4,则索引范围是
[0, 15],共有= 16个索引值。
- 缺点:
- 当连续特征发生轻微扰动(perturbation)时,比如
[0.01 → 0.1],可能会导致索引发生剧烈变化(例如从9变为1)。- 随着 d 的增加,索引值范围呈指数级增长,对应的分类器参数也会急剧增大。
例如,当 d = 32 和 h = 2048 时,参数量达到 8.8万亿,这超出了当前的计算能力。右侧:无限词汇分类器(Infinite-Vocabulary Classifier,IVC)
- IVC不直接预测索引,而是逐位预测量化特征(bit labels)。
- 例如,对于
[-1, +1, -1, +1],IVC直接预测其量化的位值。- 优点:
- 由于预测的是量化后的特征值,轻微的连续特征扰动仅引起量化特征的细微变化,因此预测更稳健。
- 参数量与 d 呈线性增长(而非指数增长),当 d = 32 和 h = 2048 时,IVC只需 0.13M(13万)参数,远低于传统分类器。
二、Related work
1、自回归模型(AutoRegressive Models)
自回归模型利用上下文信息预测下一个标记(token),并逐步生成目标输出。
在视觉任务中,自回归模型通过离散图像分词器将图像分割成一系列索引级标记(tokens),再通过 Transformer 逐步预测这些标记,最终生成完整图像。
- 离散图像分词器(Discrete Tokenizers):
将图像分割成小块并量化为离散标记(tokens)。- 解码器 Transformer:
通过索引预测逐步生成图像,类似于文本生成任务中的下一个单词预测(next-token prediction)。
基于向量量化(VQ-based)的方法使用向量量化技术将图像块(image patches)转换为索引级标记(index-wise tokens),并使用仅包含解码器的 Transformer(decoder-only transformer)来预测下一个标记的索引。然而,这些方法受到以下限制:
- 缺乏大规模的 Transformer 模型;
- 向量量化自动编码器(VQ-VAE)[64] 固有的量化误差(quantization error)。
VAR 重新定义了图像生成的任务,将传统的“逐步生成像素或标记”方式替换为“逐尺度预测(next-scale prediction)”:
- 逐尺度预测:
不直接预测像素,而是预测不同层次或尺度上的图像特征,捕获全局视觉信息结构。- 改进效果:
显著提升了生成图像的质量和采样速度。
2、扩散模型(Diffusion Models)
扩散模型是一种基于去噪学习的生成方法。它模拟数据分布的逆扩散过程(reverse diffusion process),通过逐步去噪生成高质量的样本。
- 去噪学习机制(Denoising Learning Mechanisms): 扩散模型的核心是通过学习噪声的分布来逐步还原数据分布,这一机制的优化(如[27, 41])显著提升了生成图像的质量。
- 采样效率(Sampling Efficiency): 由于扩散模型生成样本需要多个步骤(迭代),采样效率成为限制其实际应用的关键问题。相关研究(如[53, 52, 38, 39, 4])通过优化采样过程,减少生成时间。
潜在扩散模型引入了在潜在空间(latent space)中建模的概念,相较于直接在像素空间建模,潜在空间的表示更加紧凑且计算效率更高。
DiT 引入了一种更加可扩展的 Transformer 架构用于扩散建模,相比传统的卷积网络方法,Transformer 能更好地捕获全局特征。
3、模型扩展(Scaling Models)
扩展定律指出,模型的性能(如测试集的交叉熵损失)与以下三个变量之间存在幂律关系:
- 模型规模(Model Size): 参数量越大,模型的性能越强(前提是有足够的数据和计算资源支持)。
- 数据集规模(Dataset Size): 数据越多,模型的表现越好。
- 计算资源(Compute): 提供足够计算力可以更充分地训练大模型。
三、Infinity Architecture
1、Infinity 框架
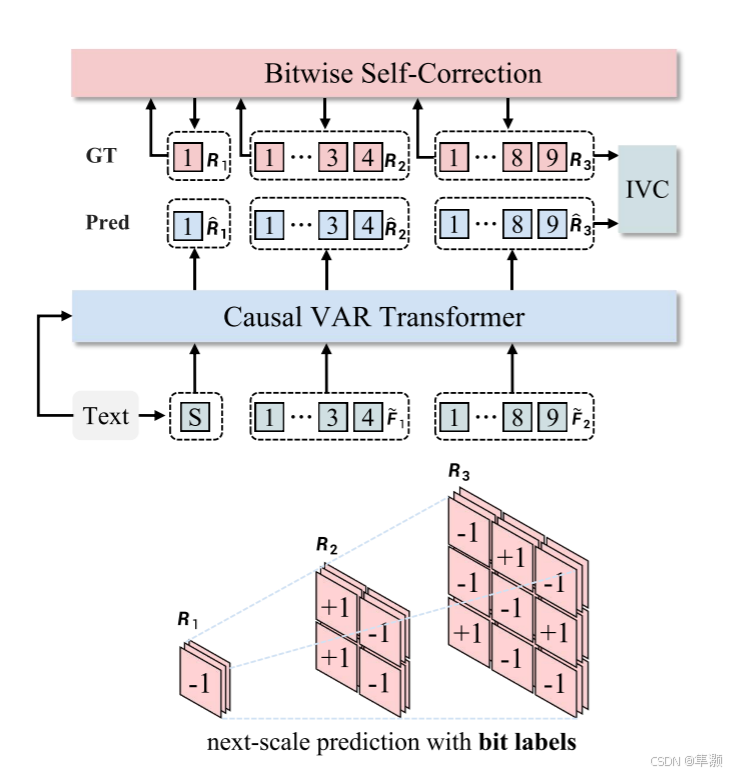
Infinity 模型的核心框架如下图所示,展示了其主要组成部分以及运行过程,包含 比特级自纠正(Bitwise Self-Correction)、因果视觉自回归 Transformer(Causal VAR Transformer) 和 多尺度视觉分词器(Multi-Scale Visual Tokenizer)。
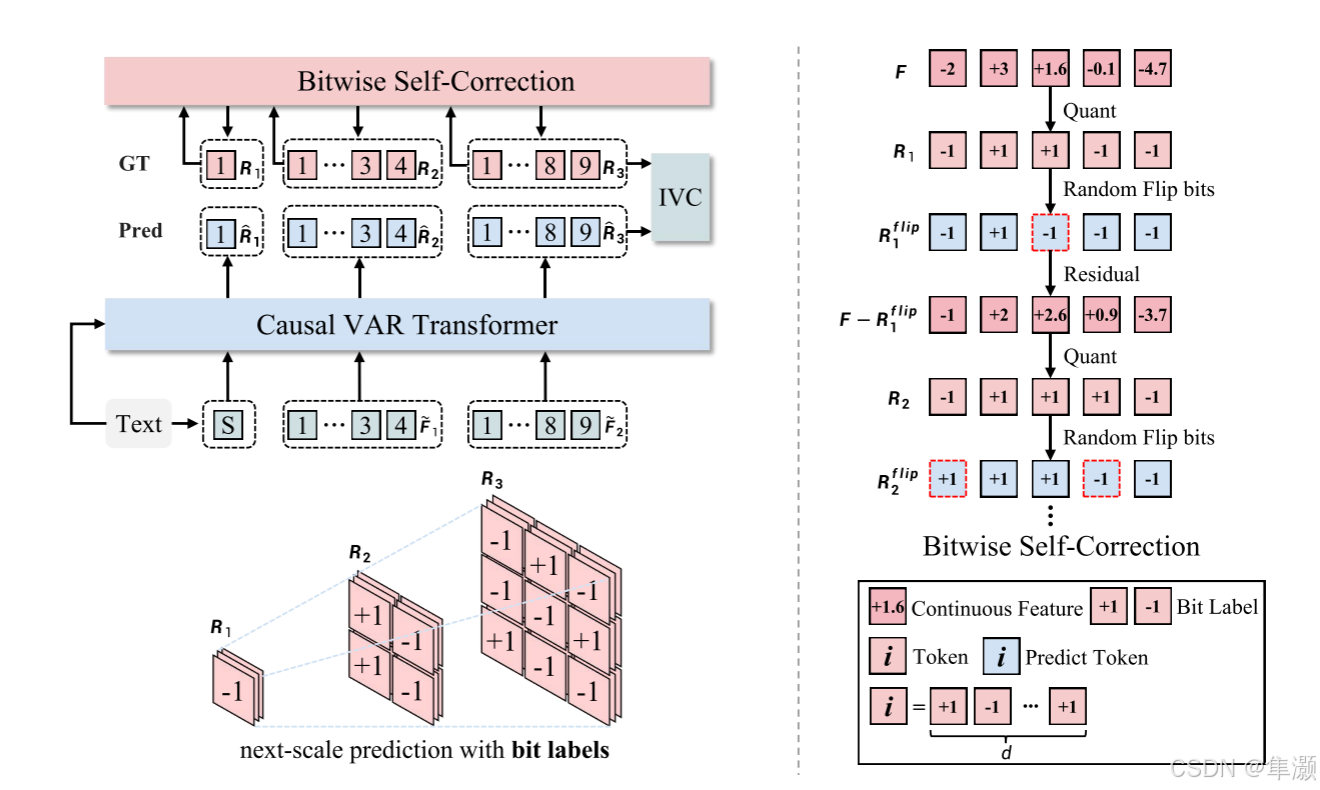
输入包括 文本提示(Text Input) 和 目标图像(Ground Truth, GT)。文本提示通过交叉注意力机制进行指导预测。
视觉分词器首先将图像 编码为特征图
(步长为
),然后将特征图
量化为
个多尺度的残差图
。第
级的残差图的分辨率为
,其分辨率从
到
逐渐增大。基于这一系列的残差图,我们可以通过如下公式逐步逼近连续特征
:
其中,表示双线性上采样(bilinear upsampling),
是累积上采样的
。
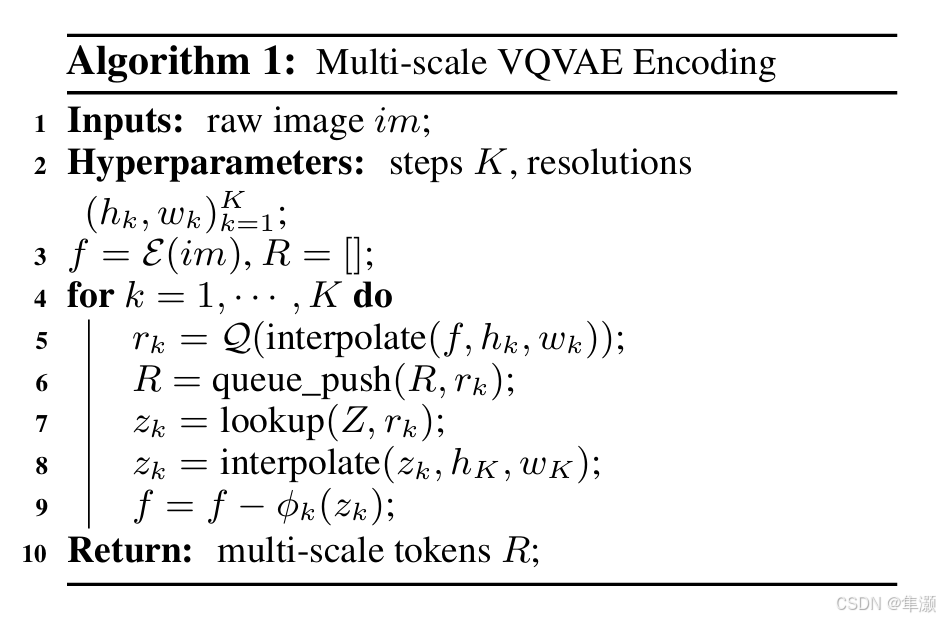
这部分的过程实际上就是上一篇论文VAR的特征量化过程。
伪代码如下:
随后,Transformer 以自回归方式学习在前一尺度的预测结果和文本输入的条件下,预测下一尺度的残差 。自回归的概率可以形式化表示为:
其中, 是提取的文本嵌入。
是预测
时的前缀上下文。此外,文本嵌入
通过交叉注意力机制进一步引导预测过程。
具体来说,如上图所示,文本嵌入 被投影为一个
作为第一尺度的输入,其中
是 Transformer 的隐藏维度。在第一尺度,Transformer 基于
预测
。在第
尺度,为了匹配输入特征和输出标签
的空间大小,我们将前一尺度
的下采样特征
作为输入来预测
,公式如下:
其中,表示双线性下采样,
和
的空间大小均为
。下面伪代码展示了获取二值量化结果和 Transformer 输入的详细过程。
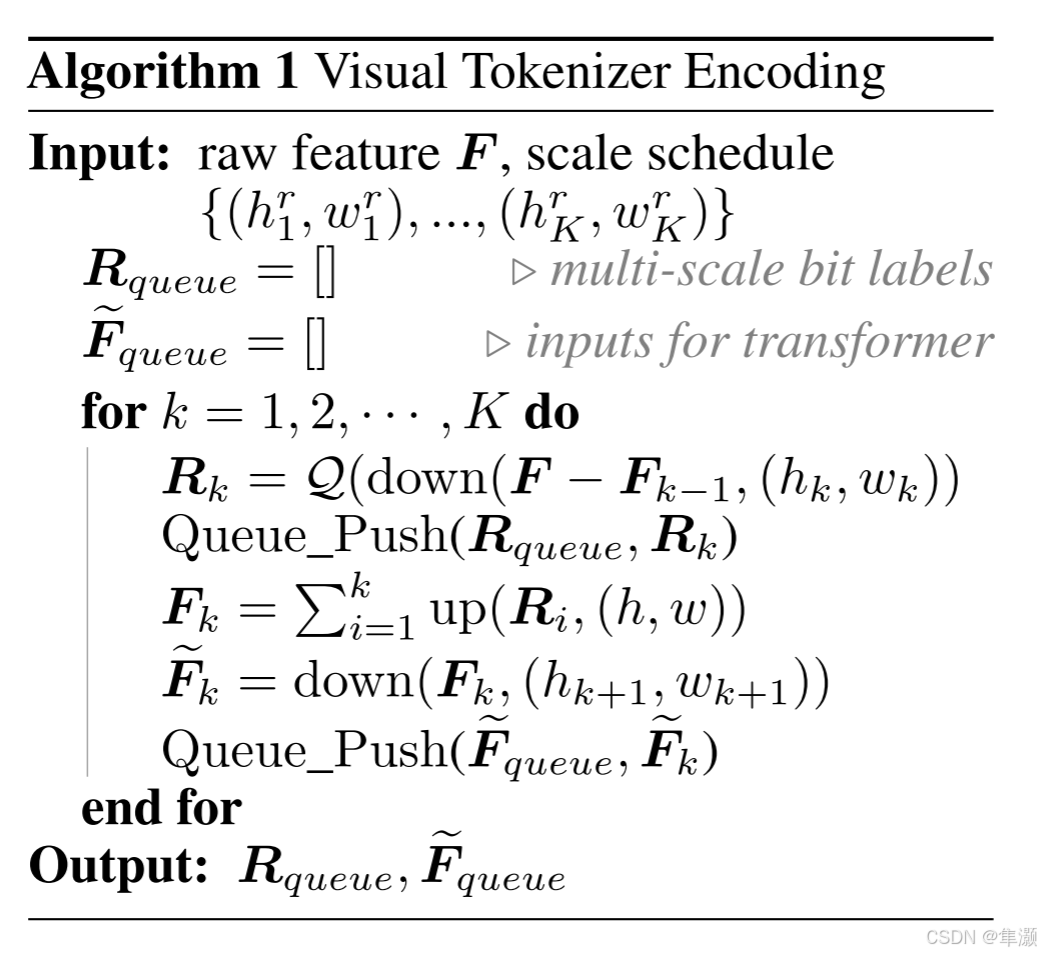
输入的原始特征图。
定义了多尺度残差图的分辨率
,用于逐步生成多尺度残差
和下采样特征
。
初始化一个队列,用于存储多尺度的残差比特标签(bit labels)。
初始化一个队列,用于存储输入给 Transformer 的特征。
从
到
,依次处理每个尺度。
:
表示当前特征
减去前一尺度的累积特征
,得到当前尺度的残差。
down表示对残差进行双线性下采样,使其符合当前尺度
:将
中。
:
表示对残差
进行双线性上采样到原始分辨率
。累积和: 当前尺度的累积特征
是所有尺度残差
到
:累积特征
的分辨率。
:将
添加到特征队列
中。
。
:Transformer 输入特征队列,存储所有尺度的下采样特征
,作为 Transformer 的输入。
在先前基于索引(index-wise)的表示方法中,预测的形状为,其中
是视觉分词器的词汇大小。当使用二值量化(binary quantization) 且代码嵌入维度为
时,
。当
较大时,所需的计算资源变得难以承受。
为了更好的理解,这里放一张 VAR 的 transformer 训练图,与infinity 进行对比。
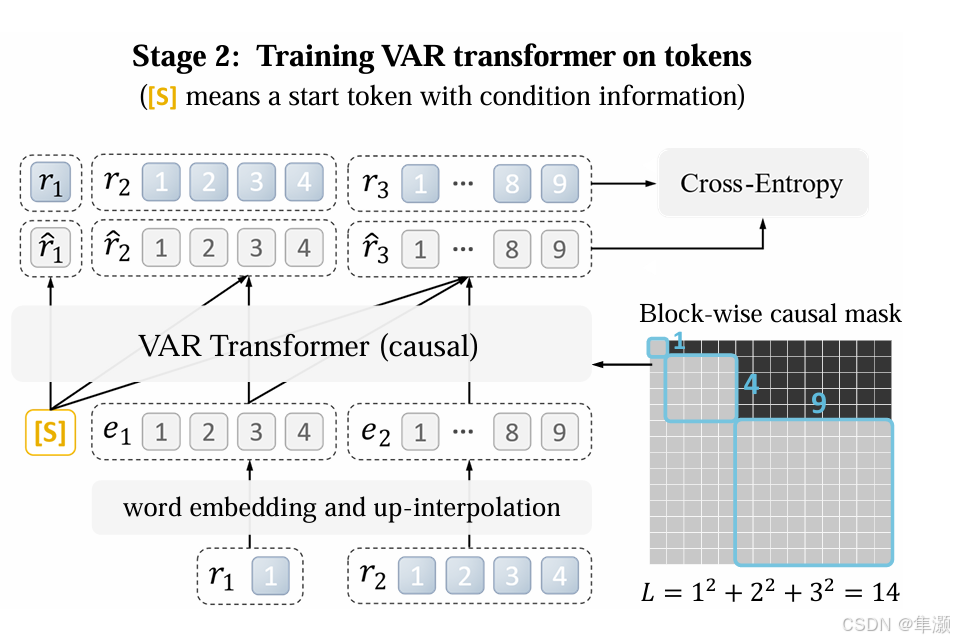
文生图的VAR 和 传统VAR 看架构区别,似乎就是不同,传统VAR 的
是文章设置的,文生图的VAR 是由text 转换的。
2、Visual Tokenizer
扩展词汇表的规模可以显著提高图像重建和生成的质量。但是直接扩大现有分词器的词汇表会大幅增加内存消耗和计算负担,导致实际不可行。本文提出了 比特级多尺度残差量化器(Bitwise Multi-Scale Residual Quantizer),通过降低内存需求支持超大规模词汇表(例如 ),从而充分发挥离散分词器的潜力。
(1)核心思想:
用 比特级量化器(Bitwise Quantizer) 替代传统的向量量化器(Vector Quantizer)。
优点:
- 与输入维度无关(Dimension-Independent)。
- 大幅减少计算复杂度和内存需求。
(2)量化公式
在多尺度量化器的第 层,将连续残差向量
量化为二值输出
,公式如下:
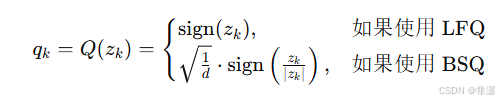
LFQ(Logistic Function Quantizer):直接对向量取符号(正为
,负为
)。
BSQ(Binary Spherical Quantizer):将向量 归一化为单位向量(单位化),sign (二值化),并加上一个常数
(缩放因子)。
LFQ 是一种 简单直接的比特级量化方法,其核心思想是直接对输入特征向量
的每个元素应用符号函数(sign function)进行二值化。
BSQ 是一种 改进型的比特级量化方法,通过加入 单位化(normalization) 和 缩放因子,解决了 LFQ 的计算复杂度和内存需求问题,同时提升了量化的稳定性。
| 量化器 | 优点 | 缺点 |
| LFQ | 简单直接,通过符号函数量化 | 计算复杂度 |
| BSQ | 输入输出均为单位向量,计算复杂度仅为 | 相比 LFQ,多了归一化操作,计算稍复杂。 |
我们可以发现,BSQ 的复杂度为 ,显著低于 LFQ 的
。即使代码簿大小达到
,BSQ 的内存需求也没有明显增加。
(3)熵惩罚(Entropy Penalty)
为了均匀利用代码簿中的所有值,引入熵惩罚项:
其中,:对输入
进行量化后的离散输出分布(比如比特级表示)。
:熵函数,用于衡量一个分布的不确定性或多样性。
:期望值运算符,表示对分布的平均值。
第一项: 计算分布
的熵在所有样本上的期望。
第二项 : 计算量化分布的均值的熵。
熵惩罚的目的是让模型尽可能使用更多的比特组合,避免代码簿利用率过低。
3、无限词汇分类器
IVC(Infinite-Vocabulary Classifier) 用 个二值分类器替代传统的
类分类器,将指数级计算复杂度降低到线性级别。每位比特的预测相互独立,不受其他位的影响。即使某些维度特征接近 0,其他维度仍然可以提供清晰的监督信号。
传统方法通过索引 (由多位比特组合而成)作为目标,直接用分类器预测:
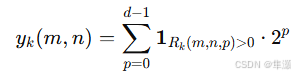
IVC 将索引预测拆解为多个二值预测任务,每个分类器独立预测一位比特值 的符号:
4、按位自校正(Bitwise Self-Correction)
视觉自回归生成(VAR)任务的目标是逐步预测每个尺度的残差 ,但直到所有尺度的残差
全部生成完毕后,才能解码出完整的图像。
教师强制训练只让 Transformer 在每个尺度上细化特征,而不是学习如何识别和纠正错误。
如果早期的尺度 预测有误,错误会被逐步传递并放大到后续尺度,最终导致生成的图像出现严重问题(如下图所示)。
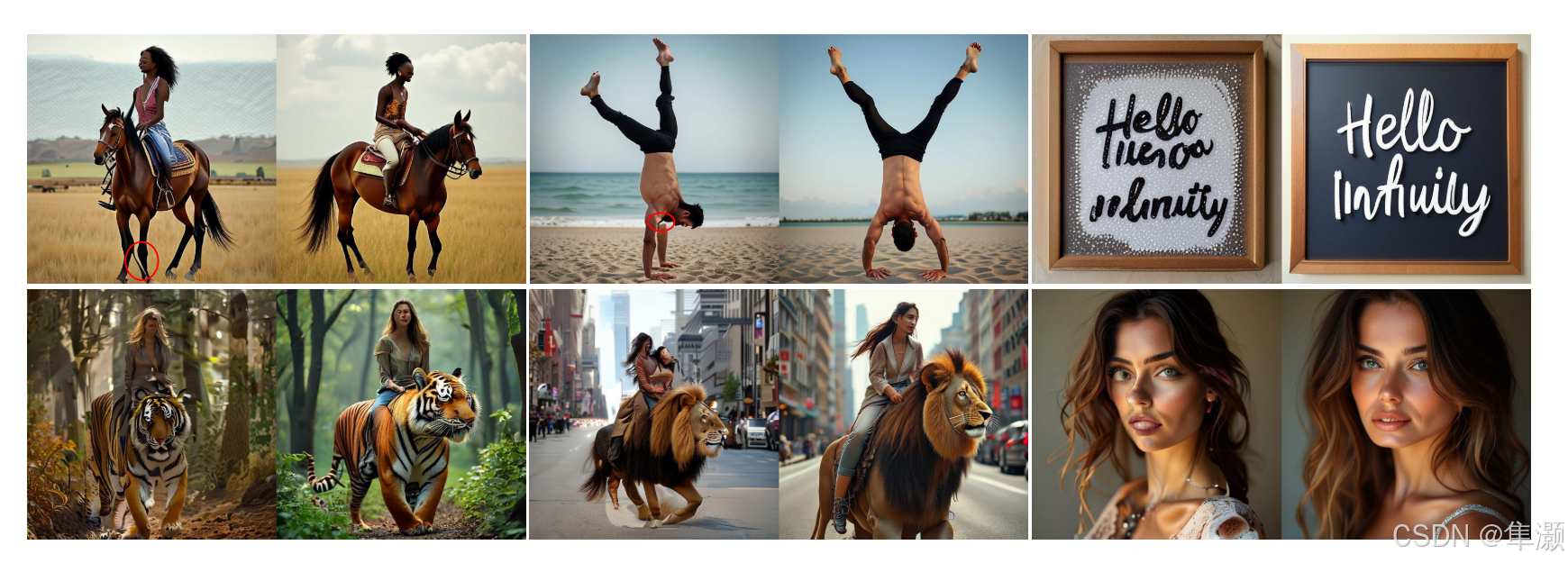
BSC 模拟并纠正模型预测中的错误,让 Transformer 在训练阶段也能处理错误输入,从而提升测试阶段的鲁棒性。
- 在训练时,随机翻转(random flipping)残差特征
的比特值,以模拟预测错误的影响。
- 使用带有错误的特征
重新计算 Transformer 的输入和目标标签,让模型学习在错误输入条件下的自我纠正能力。
具体实现如下所示:
(1)对残差特征 的比特值按概率随机翻转,生成带有错误的
:
其中 是从区间
中均匀采样的概率,表示错误的强度。
(2)用 替换
,重新计算当前尺度
的 Transformer 输入
。
(3)对输入特征进行重新量化,生成新的目标残差 作为下一尺度的预测目标。
伪代码如下:


















 861
861

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









