







在gazebo存在完美里程计(无论对机器人进行绑架还是机器人原地打滑,/odom都会精确给出机器人所在位置),我们拥有了激光雷达数据/scan和里程计数据,并且保证传感器laser和base_footprint存在tf关系就能进行2d建图。

<gazebo>
<plugin name="differential_drive_controller" filename="libgazebo_ros_diff_drive.so">
<commandTopic>cmd_vel</commandTopic>
<odometryTopic>odom</odometryTopic>
<odometryFrame>odom</odometryFrame>
<odometrySource>world</odometrySource>
<publishOdomTF>true</publishOdomTF>
<robotBaseFrame>base_footprint</robotBaseFrame>
<publishWheelTF>true</publishWheelTF>
<publishTf>true</publishTf>
<publishWheelJointState>false</publishWheelJointState>
<legacyMode>false</legacyMode>
<updateRate>30</updateRate>
<leftJoint>wheel_left_joint</leftJoint>
<rightJoint>wheel_right_joint</rightJoint>
<wheelSeparation>${wheelSeparation}</wheelSeparation>
<wheelDiameter>${wheelDiameter}</wheelDiameter>
<wheelAcceleration>100</wheelAcceleration>
<wheelTorque>100</wheelTorque>
<rosDebugLevel>na</rosDebugLevel>
</plugin>
</gazebo>

然而,现实中没有gazebo中的完美里程计,我们需要获取机器人的线速度(通常通过电机的编码器推算获得)、角速度(通常通过获取IMU数据推算获得)、激光雷达数据、深度相机的数据、GPS以及其他传感器数据,并进行融合获得里程计。
上面对urdf的修改只能控制机器人的驱动轮,不能获取机器人驱动轮的角度、角速度、加速度(可以读取/joint_states,但读出来的全是无效数据如下图所示)
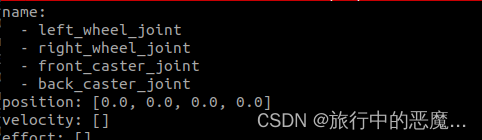
因此需要用到ros_controller
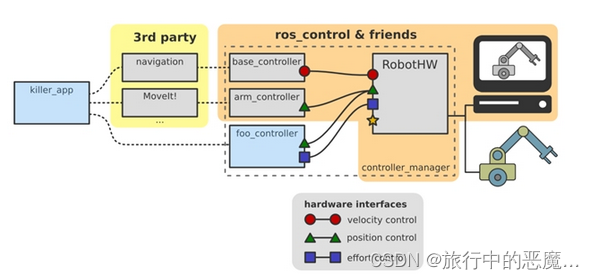
例如这份仿真用的机器人用到了两轮差分运动的运动学模型,为了在gazebo中能够读取驱动轮的角速度和加速度等信息,还需要使用controller_manager中的joint_state_controller,以及velocity_controllers
config_yaml:
joint_state_controller:
type: joint_state_controller/JointStateController
publish_rate: 50
left_rear_wheel_velocity_controller:
type: velocity_controllers/JointVelocityController
joint: wheel_left_joint
pid: {p: 100, i: 0.01, d: 10.0, i_clamp: 0.0}
right_rear_wheel_velocity_controller:
type: velocity_controllers/JointVelocityController
joint: wheel_right_joint
pid: {p: 100, i: 0.01, d: 10.0, i_clamp: 0.0}1在对应的关节中加入transsmion:
<transmission name="simple_trans_left">
<type>transmission_interface/SimpleTransmission</type>
<joint name="wheel_left_joint">
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
</joint>
<actuator name="foo_motor_left">
<mechanicalReduction>50</mechanicalReduction>
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
</actuator>
</transmission>
<transmission name="simple_trans_right">
<type>transmission_interface/SimpleTransmission</type>
<joint name="wheel_right_joint">
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
</joint>
<actuator name="foo_motor_right">
<mechanicalReduction>50</mechanicalReduction>
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
</actuator>
</transmission>2在urdf的最后加上gazebo_ros_control使其在仿真中生效:
<gazebo>
<plugin name="gazebo_ros_control" filename="libgazebo_ros_control.so">
</plugin>
</gazebo>
3在launch中加载controller
<rosparam file="$(find clean_ct06a)/config/complex.yaml" command="load"/>
<node name="controller_spawner" pkg="controller_manager"
type="spawner" respawn="false" output="screen"
args="joint_state_controller left_rear_wheel_velocity_controller right_rear_wheel_velocity_controller"/>
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" respawn="false" output="screen">
</node>
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" /> 最终能够成功获取驱动轮的角速度:















 2885
2885











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









