









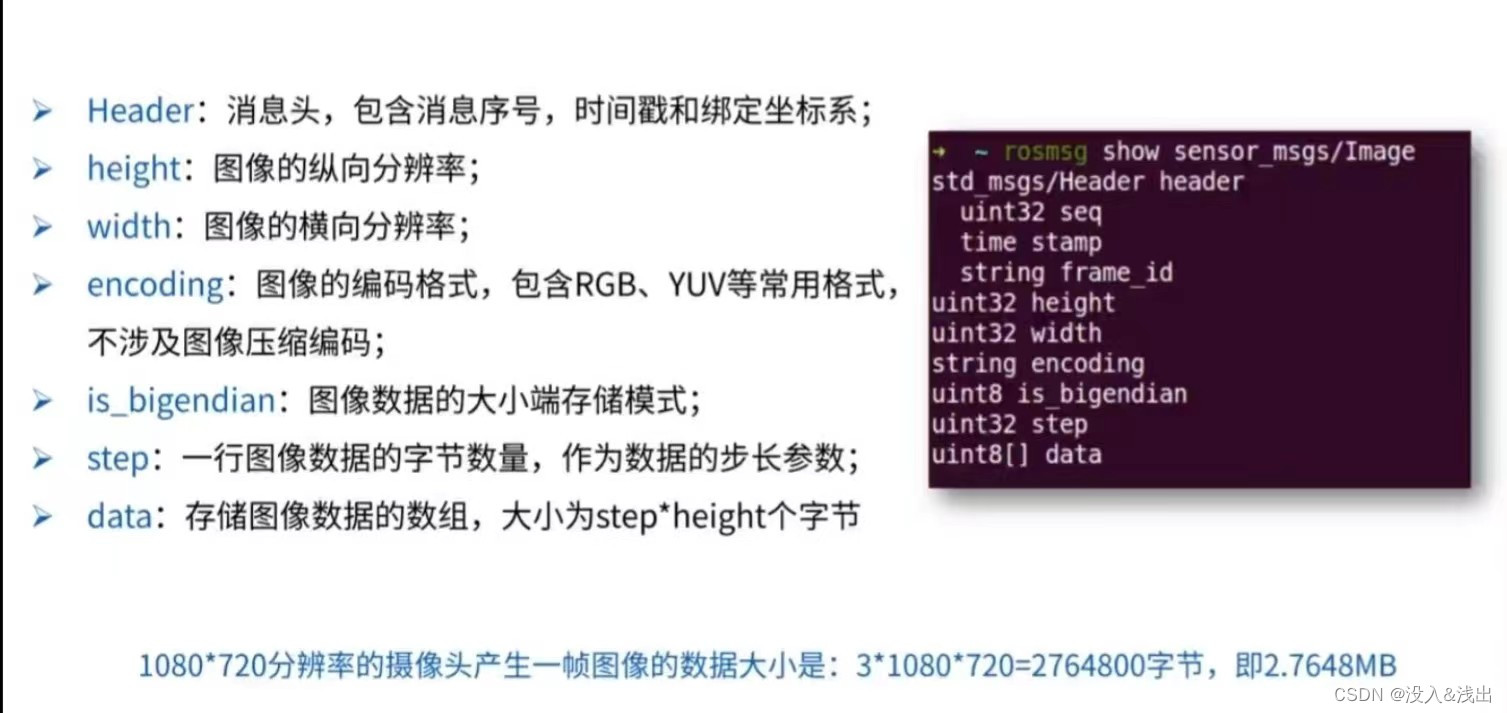
ROS图像接口
安装摄像头驱动:
cd usb_cam/src
git clone https://github.com/bosch-ros-pkg/usb_cam.git
cd ..
ctakin_make
source ./devel/setup.bash
cd usb_cam
mkdir build
cd build
cmake ..
make
摄像头驱动功能包介绍:http://wiki.ros.org/usb_cam
启动摄像头驱动功能包:
1、首先启动的roscore
2、roslaunch usb_cam usb_cam-test.launch

摄像头的标定:
安装摄像头的标定工具:
sudo apt-get install ros-noetic-camera-calibration摄像头标定:由于摄像头内部外部的一些原因,生成的物体图像会发生畸变,为了避免造成误差,需要对摄像头的参数进行标定。
1、启动摄像头 usb_cam
2、启动标定包:
rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.024 image:=/usb_cam/image_raw camera:=/usb_cam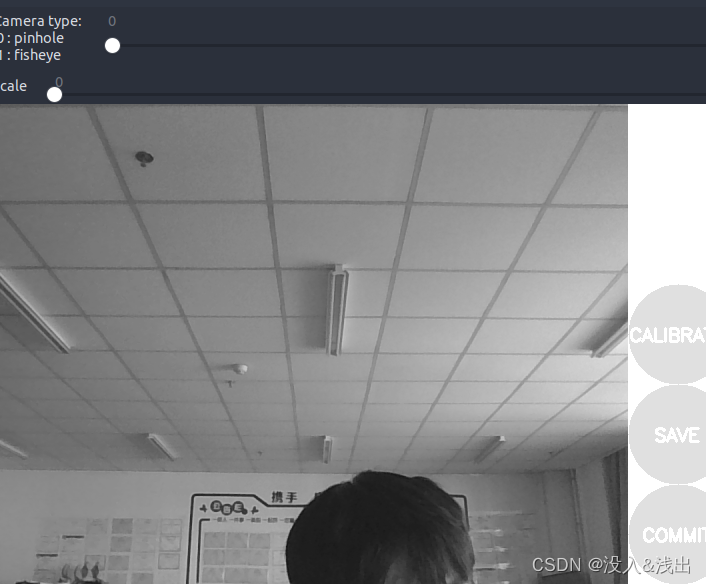
其中
size:标定棋盘格的内部角点个数;
square:这个参数对应的每个棋盘格的边长,单位是米;
image和camera:是设置摄像头发布的图像话题。
摄像头内参标定
ROS+Opencv物体识别
安装Opencv:
sudo apt-get update
sudo apt-get upgrade
sudo apt install cmake
sudo apt-get install build-essential libgtk2.0-dev libavcodec-dev libavformat-dev libjpeg-dev libswscale-dev libtiff5-dev
sudo apt-get install libgtk2.0-dev
sudo apt-get install pkg-config
mkdir build
cd build
cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local ..
sudo make -j4
sudo make install
sudo gedit /etc/ld.so.conf 中添加:include /usr/local/lib
sudo gedit /etc/bash.bashrc 中添加:PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig
export PKG_CONFIG_PATH
pkg-config opencv --modversion
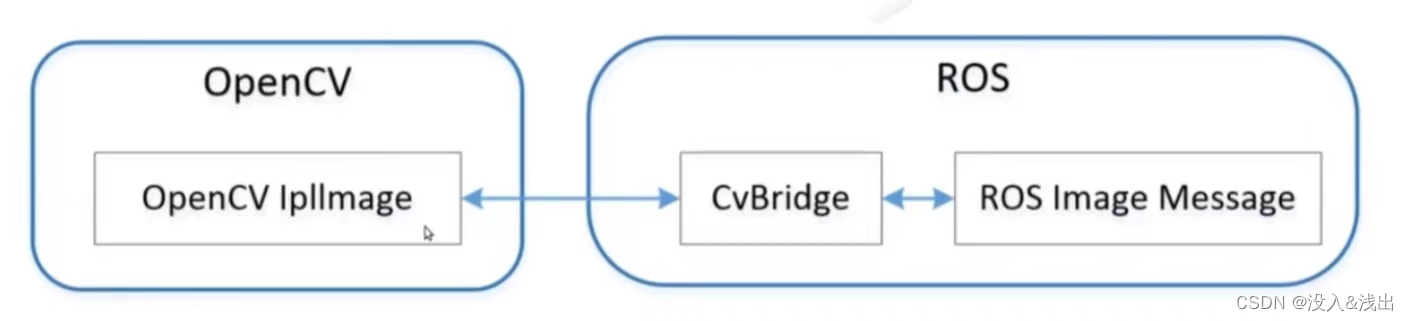
OpenCV与ROS的集成框架:
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











