







🍒🍒🍒欢迎关注🌈🌈🌈
📝个人主页:我爱Matlab
👍点赞➕评论➕收藏 == 养成习惯(一键三连)🌻🌻🌻🍌希望大家多多支持🍓~一起加油 🤗
💬语录:将来的我一定会感谢现在奋斗的自己!
🍁🥬🕒摘要🕒🥬🍁
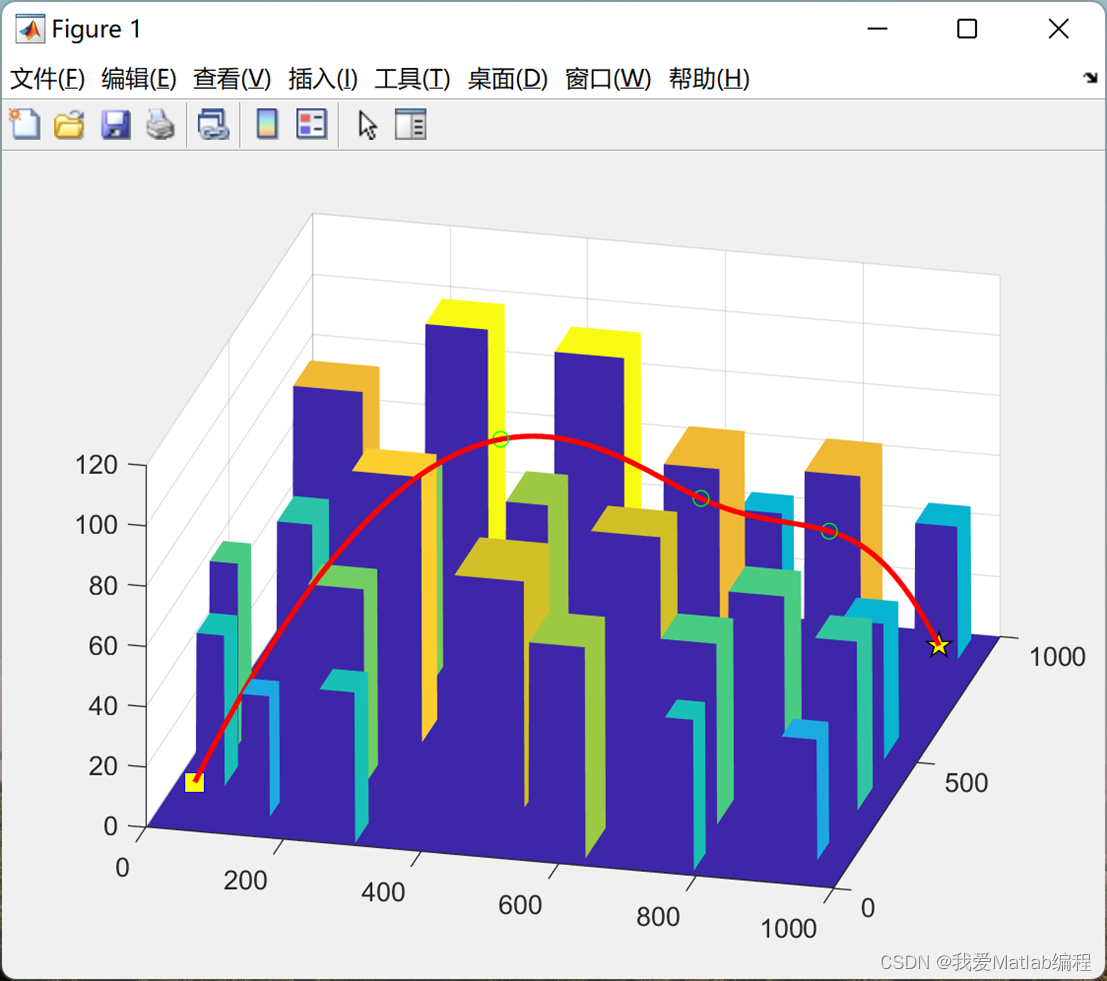
对于UAV三维路径规划这一优化问题而言,需要考虑多方面的因素。首先,UAV要在地图限制的区域内飞行。其次,为了令UAV安全飞行,UAV不能与地面和障碍物发生碰撞,并且与地面保持一定的安全距离。最后,UAV的飞行距离要尽可能短,以节省燃料并尽快到达目的地。
本代码是基于粒子群算法对UAV进行三维路径规划。首先需要构建三维地图。
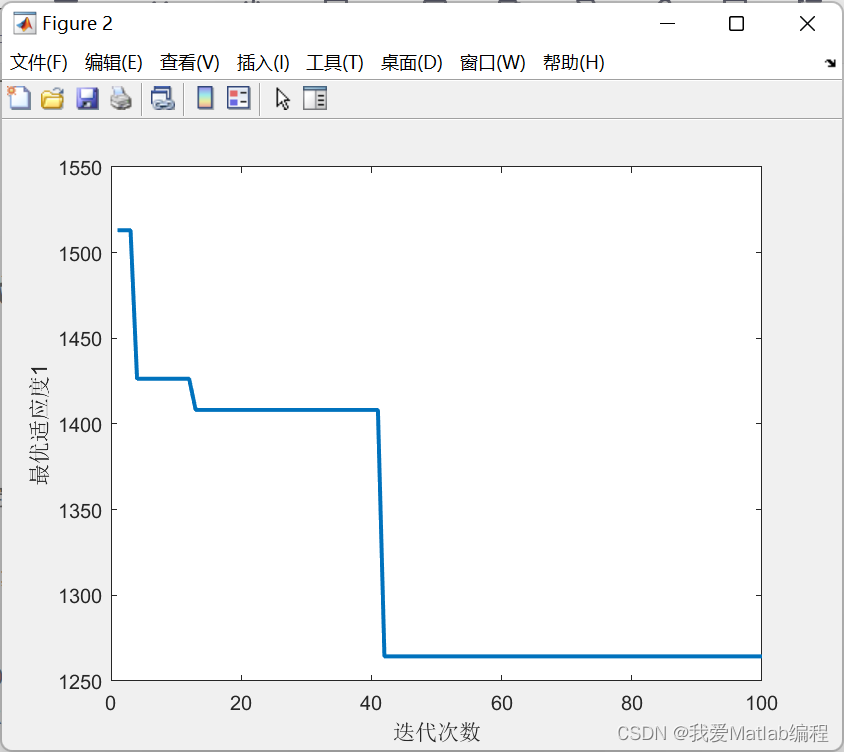
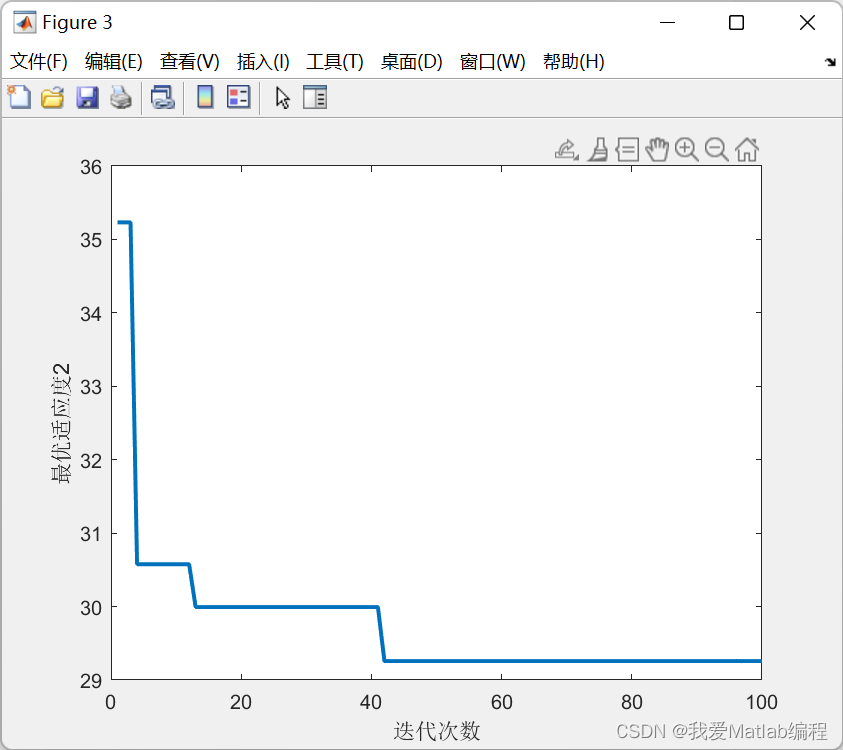
其次,设置粒子群算法的相关参数,迭代次数为100,粒子数为50,惯性权重为1.2,学习因子c1=c2=1.5,路径节点为4个(可自行增加或减少),其中每个节点为三维坐标(x,y,z),为了使UAV轨迹光滑,利用三次样条拟合散点对路径节点进行处理。
最后,需要判断路径是否与障碍相交,若相交,则设置一个比较大的惩罚项,反之保存当前适应度和路径节点,本代码的目标函数包括路径的总长度和路径节点距离地面的高度,均为越小越好,下图为优化的路径结果图。
✨🔎⚡运行结果⚡🔎✨
💂♨️👨🎓Matlab代码👨🎓♨️💂
clc
clear
close all
%% 三维路径规划模型定义
startPos = [40, 129, 5];
goalPos = [951, 833, 10];
% 随机定义山峰地图
mapRange = [1000,1000,120]; % 地图长、宽、高范围
[X,Y,Z] = defMap4(mapRange);
%% 初始参数设置
N = 100; % 迭代次数
M = 50; % 粒子数量
pointNum = 4; % 每一个粒子包含三个位置点
w = 1.2; % 惯性权重
c1 = 1.5; % 社会权重
c2 = 1.5; % 认知权重
% 粒子位置界限
posBound = [[0,0,10]',[1000,1000,60]'];
% 粒子速度界限
alpha = 0.1;
velBound(:,2) = alpha*(posBound(:,2) - posBound(:,1));
velBound(:,1) = -velBound(:,2);
% velBound(3,1)=-4;
% velBound(3,2)=4;
%% 种群初始化
% 初始化一个空的粒子结构体
particles.pos= [];
particles.v = [];
particles.fitness = [];
particles.path = [];
particles.Best.pos = [];
particles.Best.fitness = [];
particles.Best.path = [];
% 定义M个粒子的结构体
particles = repmat(particles,M,1);
% 初始化每一代的最优粒子
GlobalBest.fitness = [inf,inf];
% 第一代的个体粒子初始化
for i = 1:M
% 粒子按照正态分布随机生成
particles(i).pos.x = unifrnd(posBound(1,1),posBound(1,2),1,pointNum);
particles(i).pos.x=sort(particles(i).pos.x);
particles(i).pos.y = unifrnd(posBound(2,1),posBound(2,2),1,pointNum);
particles(i).pos.y=sort(particles(i).pos.y);
particles(i).pos.z = unifrnd(posBound(3,1),posBound(3,2),1,pointNum);
%particles(i).pos.z=sort(particles(i).pos.z);
% 初始化速度
% particles(i).v.x = zeros(1, pointNum);
% particles(i).v.y = zeros(1, pointNum);
% particles(i).v.z = zeros(1, pointNum);
particles(i).v.x=unifrnd(velBound(1,1),velBound(1,2),1,pointNum);
particles(i).v.y=unifrnd(velBound(2,1),velBound(2,2),1,pointNum);
particles(i).v.z=unifrnd(velBound(3,1),velBound(3,2),1,pointNum);
% 适应度
[flag,fitness,path] = calFitness(startPos, goalPos,X,Y,Z, particles(i).pos);
% 碰撞检测判断
if flag == 1
% 若flag=1,表明此路径将与障碍物相交,则增大适应度值
particles(i).fitness = 1000*fitness;
particles(i).path = path;
else
% 否则,表明可以选择此路径
particles(i).fitness = fitness;
particles(i).path = path;
end
% 更新个体粒子的最优
particles(i).Best.pos = particles(i).pos;
particles(i).Best.fitness = particles(i).fitness;
particles(i).Best.path = particles(i).path;
% 更新全局最优
if (particles(i).Best.fitness(1) < GlobalBest.fitness(1))&(particles(i).Best.fitness(2) < GlobalBest.fitness(2))
GlobalBest = particles(i).Best;
end
end
% 初始化每一代的最优适应度,用于画适应度迭代图
fitness_beat_iters = zeros(N,2);
📜📢🌈参考文献🌈📢📜
[1]孙雪莹,易军凯.无人机三维路径规划的粒子群混合算法[J/OL].电讯技术:1-12[2022-11-15].http://kns.cnki.net/kcms/detail/51.1267.TN.20220307.1837.004.html















 265
265











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









