







之前写了一篇VIO因子图的,感觉写得不好,今天搞个进阶
以DSO作为蓝本来做说明,图源是东北大学龚益群同学的,他对因子图的讲解稍笼统了一些,今天完整地拆解一下DSO因子图。
DSO是一个很有意思的系统,先看看H矩阵的整体构成:

这个H矩阵和我们传统看到的H矩阵是有很大不同的,其中f表示状态量,d表示逆深度,还多了一个相机内参的优化c。这也是DSO比较独特的地方,同时优化位姿/逆深度/光度误差。
Hff: 状态的Hession
Hcc:相机内参的Hession
Hdd:特征点逆深度Hession
Hfc:状态量与相机内参联合Hession
Hcd:逆深度与相机内参的联合Hession
Hfd:状态量与逆深度的联合Hession
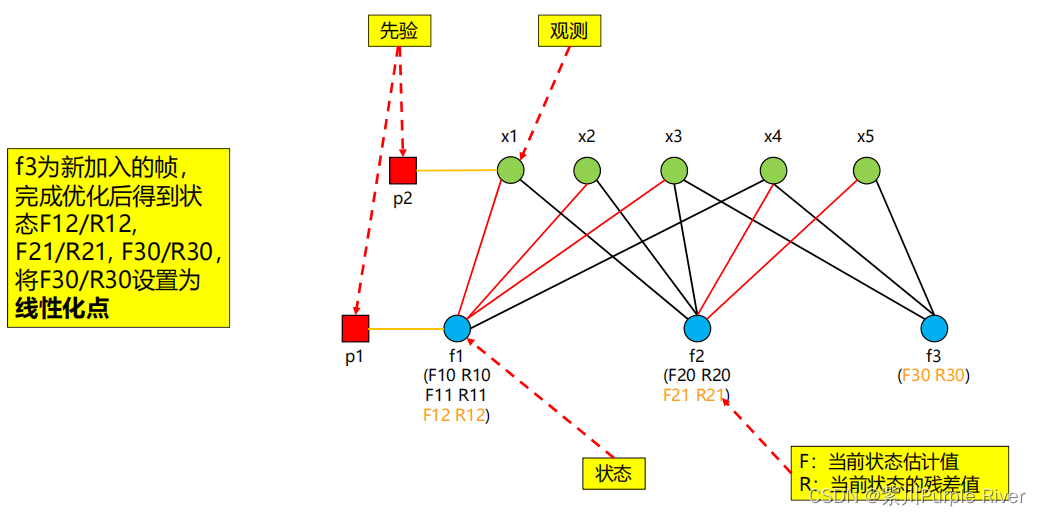
第一张图的理解是整个因子图拆解中最重要的,起始位姿与起始点f1/x1关联着先验p1与p2.F和R分别对应当前状态的估计与残差值。
这里面需要认真理解的是F和R后续的数字,其中第一个1,2,3指的是对应状态或
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1467
1467

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









