






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
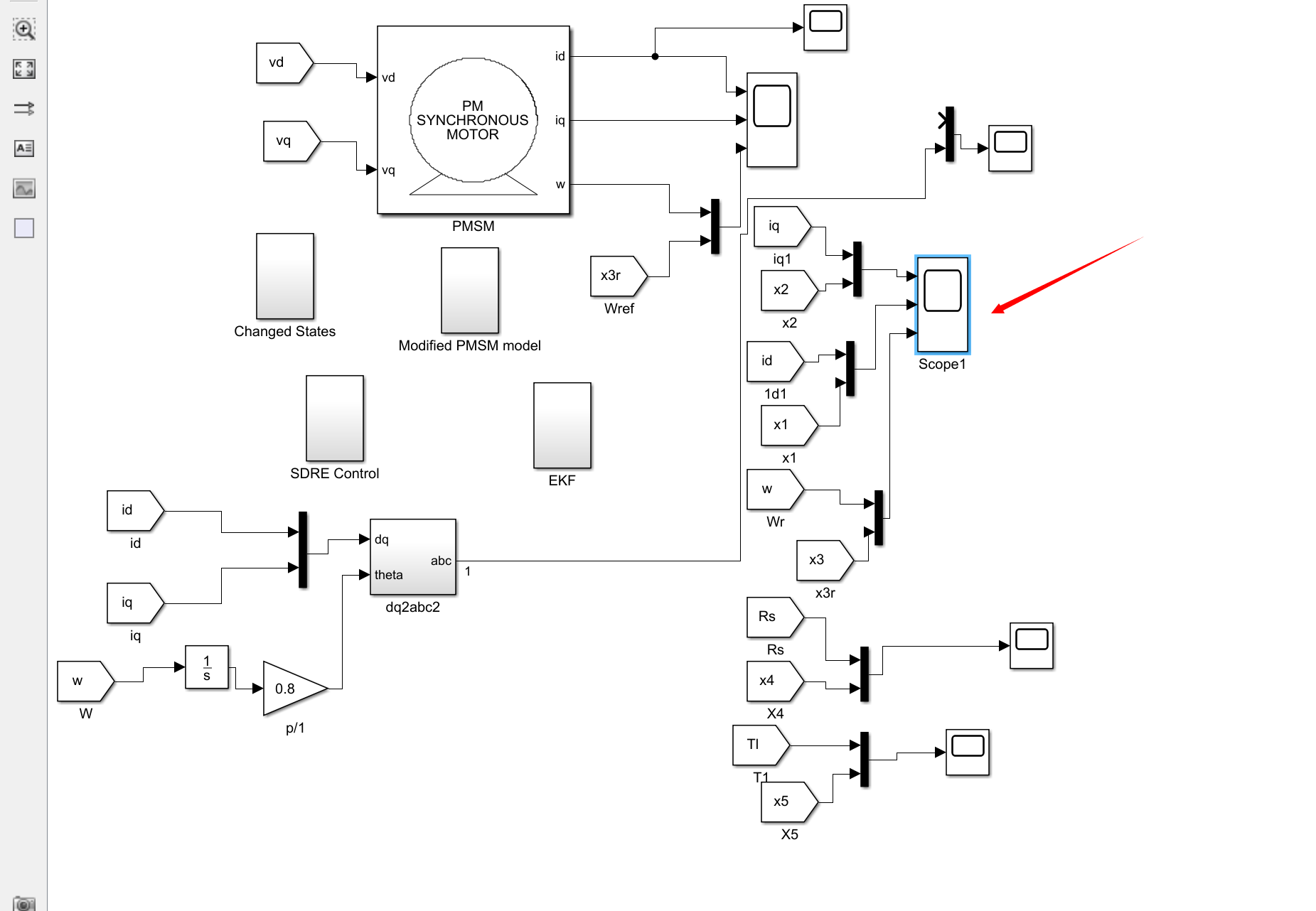
基于自适应SDRE的非线性无传感器速度控制PMSM驱动器的方法是基于状态相关的Riccati方程(SDRE)控制技术的最新进展。该方法通过梯度型神经网络的实时计算方法,实现了在线控制PMSM的目标。这一创新性的方法不仅克服了传统控制方法中对传感器的依赖,还提高了控制系统的鲁棒性和性能。通过实时计算方法,系统可以更加灵活地应对外部环境变化和负载扰动,从而确保PMSM驱动器的稳定性和可靠性。这一方法的提出将为PMSM驱动器的控制领域带来新的突破,为工业应用和科研领域提供了更加可靠和高效的控制方案。
基于自适应SDRE的非线性无传感器速度控制PMSM驱动器研究是指基于自适应系统动态逆控制(SDRE)的技术,针对永磁同步电机(PMSM)驱动器,研究开发一种无传感器的非线性速度控制方法。
永磁同步电机是一种高性能的电机,通常用于需要高效率和高性能的应用领域,如电动汽车、工业驱动和风力发电等。传统的PMSM速度控制通常需要使用传感器来获取电机的转速信息,但传感器的使用会增加成本和复杂性,因此研究无传感器的速度控制方法对于PMSM驱动器的发展具有重要意义。
自适应系统动态逆控制(SDRE)是一种非线性控制方法,可以适应系统的非线性特性,并且不需要精确的系统模型。基于SDRE的无传感器速度控制方法通过利用电机的非线性特性,结合自适应控制策略,实现对PMSM驱动器的高性能速度控制,同时避免了传感器的使用。
这项研究的目标是开发一种高效、高性能的PMSM速度控制方法,通过实验和仿真验证,证明基于自适应SDRE的非线性无传感器速度控制方法在PMSM驱动器中的可行性和优越性。这样的研究有望为PMSM驱动器的应用提供更加先进和可靠的控制技术。
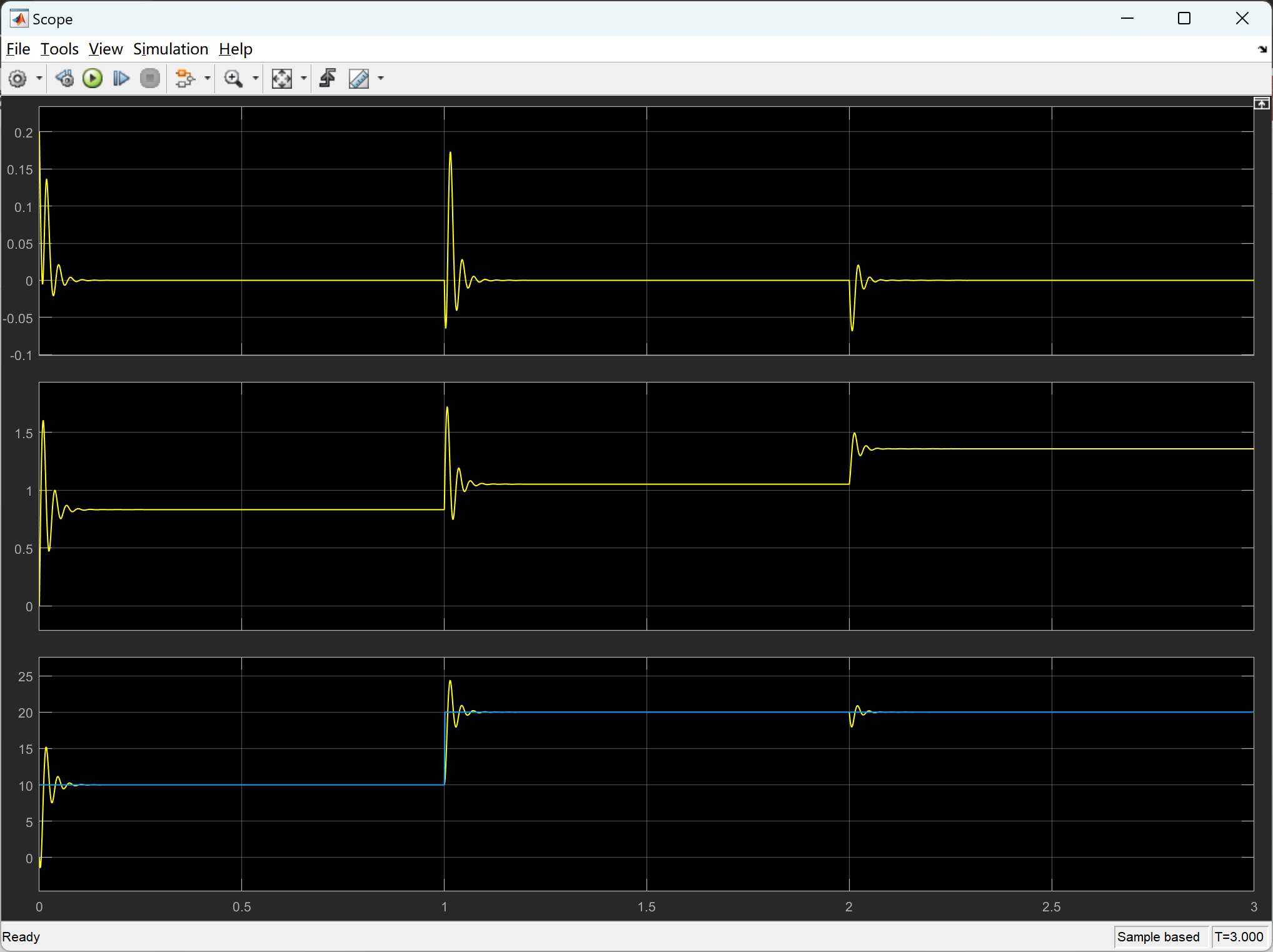
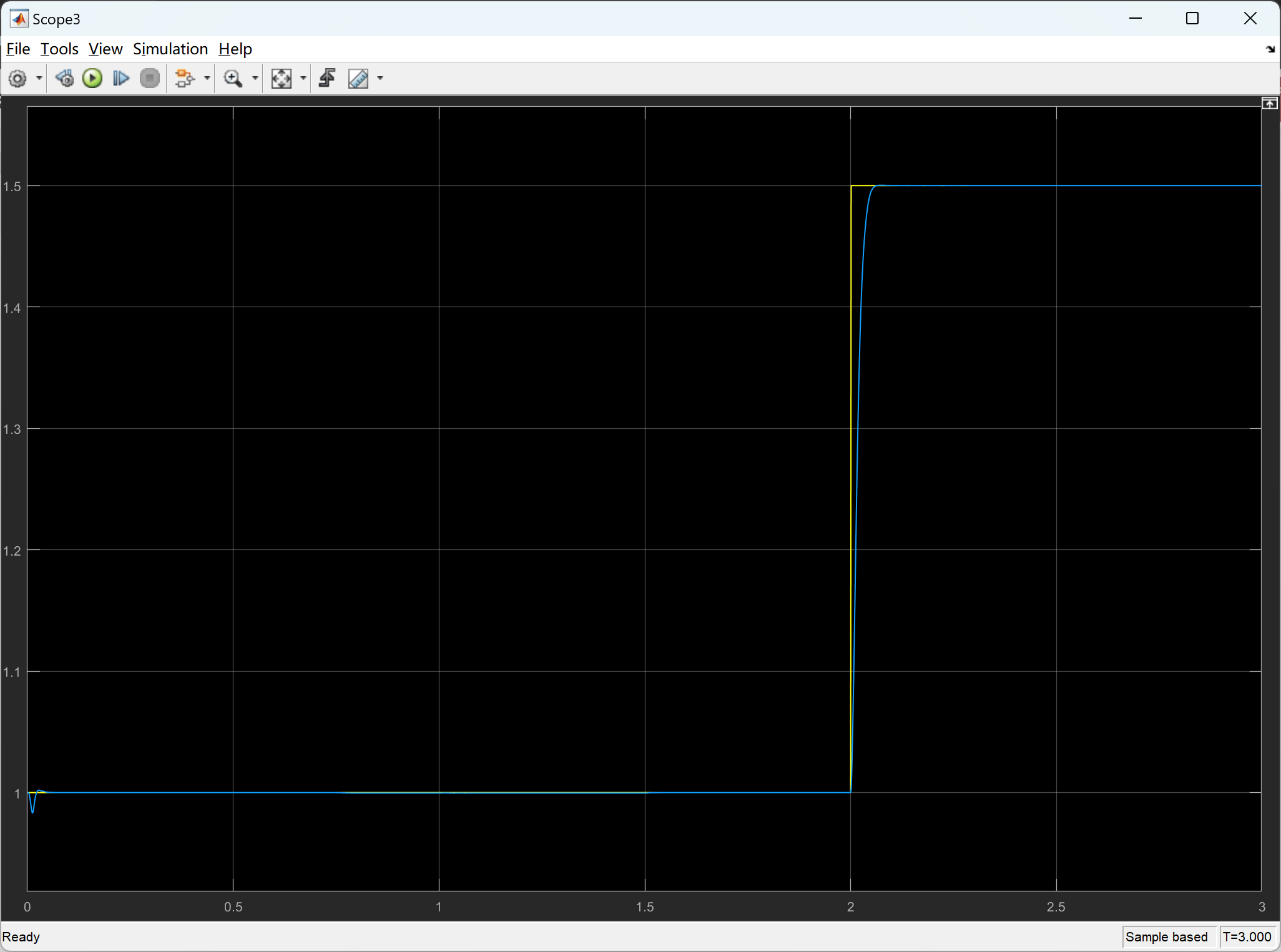
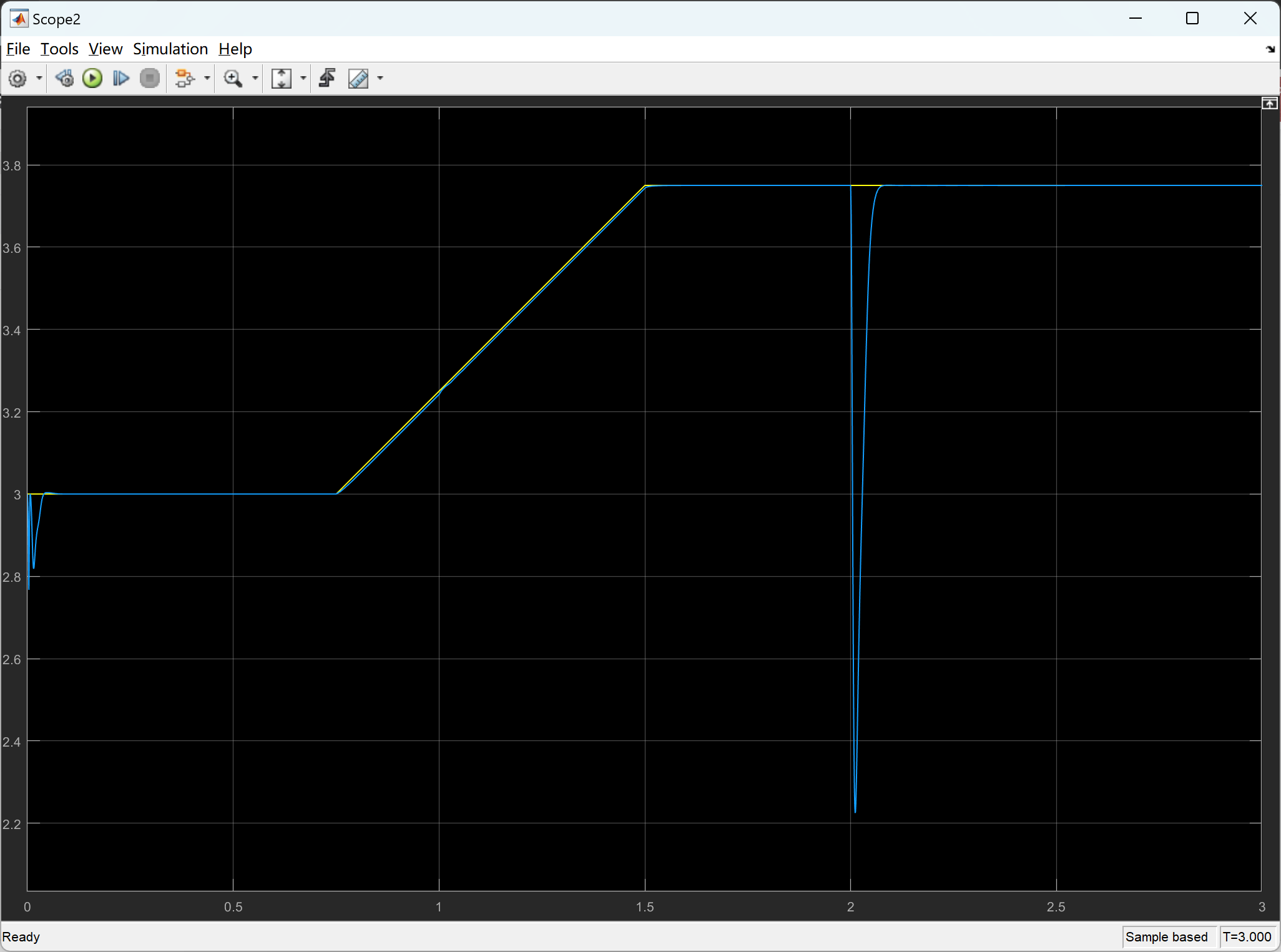
📚2 运行结果
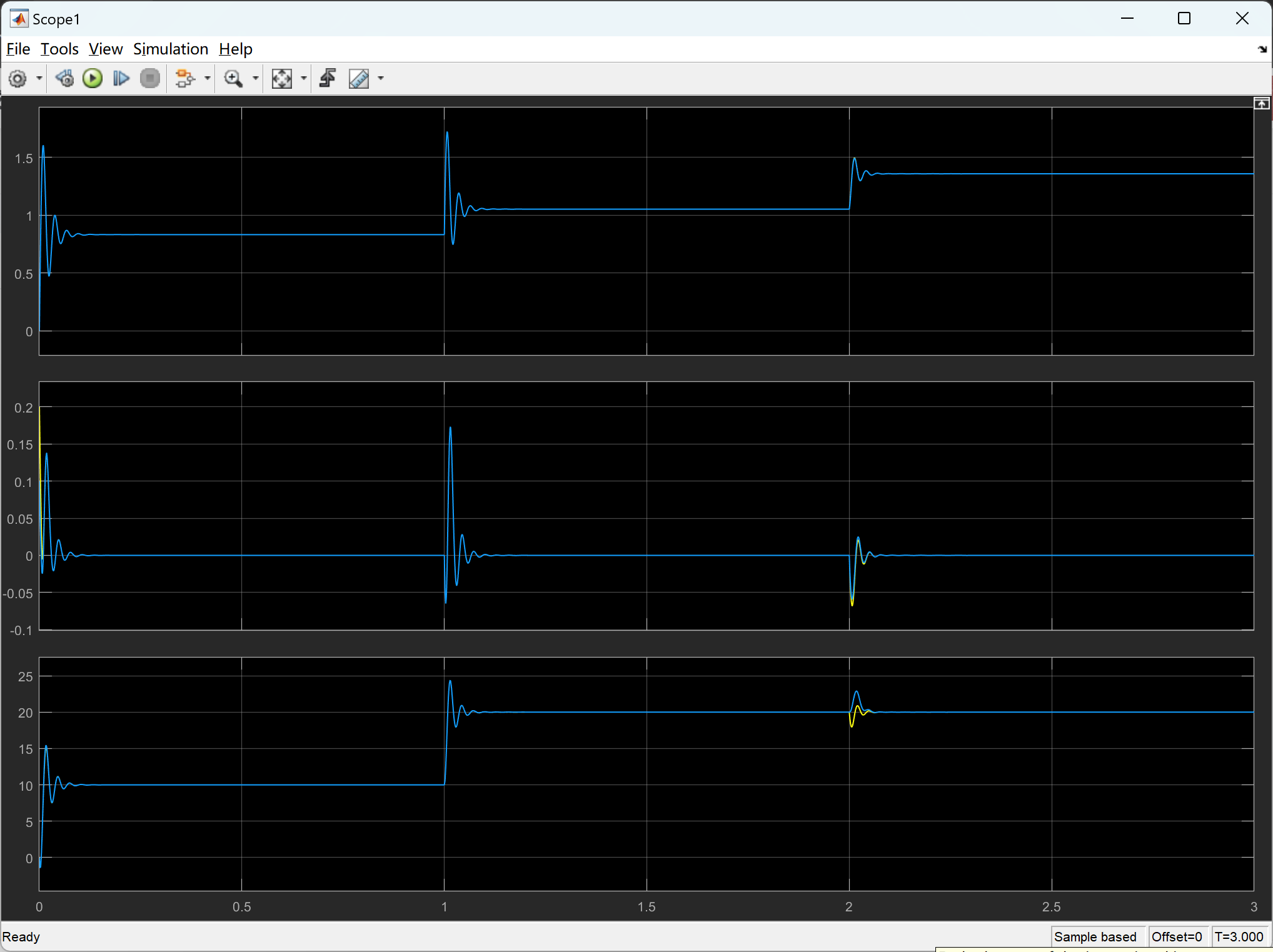
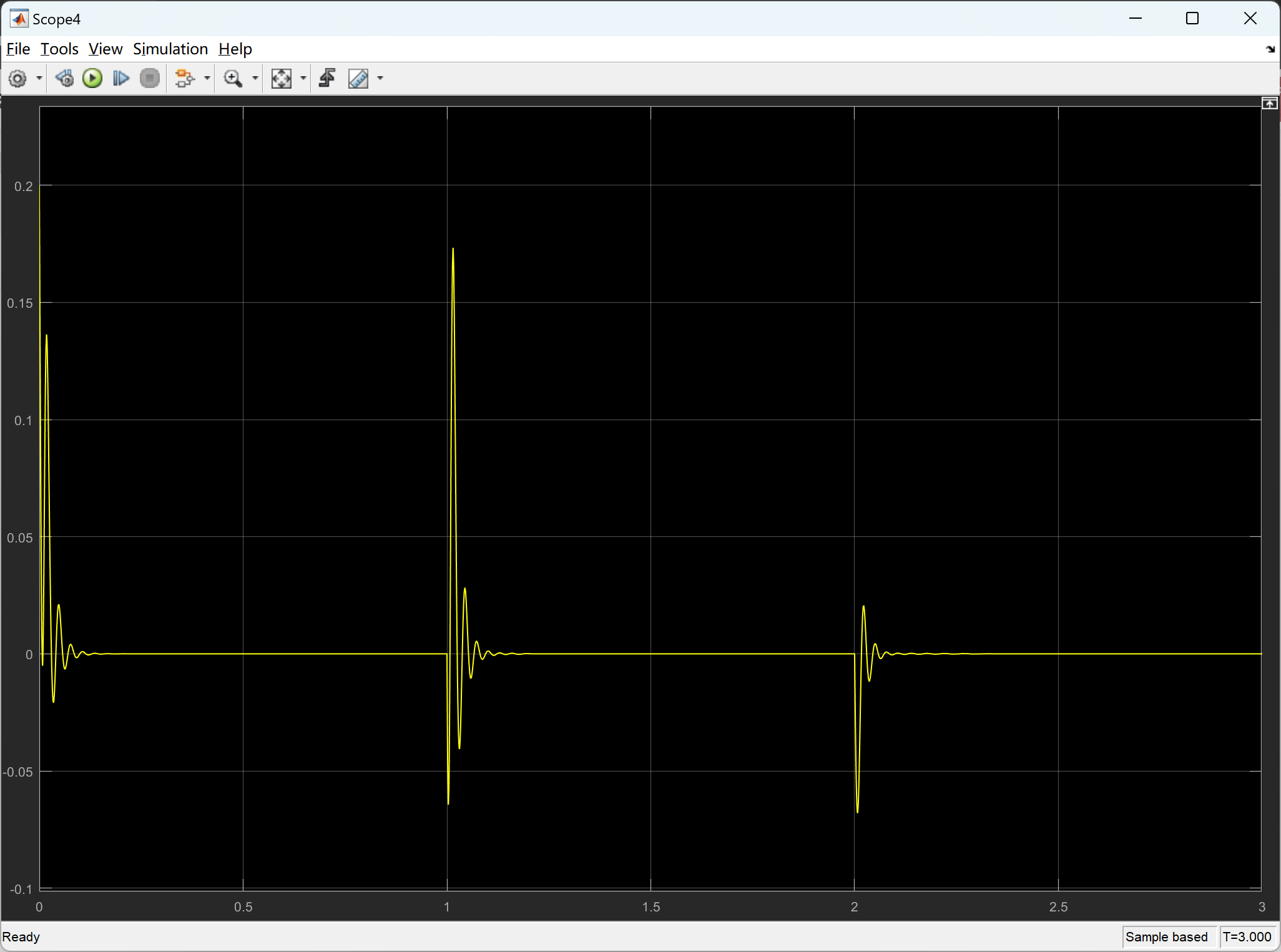



Matlab代码:
clc
clear all
Rs=0.625
Ld=0.036
Lq=0.051
phi=0.545
J=7.5e-4
F=0.036
P=2
% a1=R/Ld
a2=P*Lq/Ld
a3=P*Ld/Lq
% a4=R/Lq
a5=P*phi/Lq
a6=3/2*P*phi/J
a7=F/J
B=[1 0;0 1;0 0]
Qc=[1 0 0;0 1 0;0 0 1]
R=[1 0;0 10]
x2dot=0
x3dot=0
gama=0.1
% syms a1 a2 a3 a4 a5 a6 a7 x1 x2 x3 R
% f=[-a1*R*x1+a2*x2*x3; -a3*x1*x3-a4*R*x2-a5*x3; a6*x2-a7*x3-1/J*Tl;0]
% jacobian(f,[x1 x2 x3 R ])
% E=4300170000*[1e-6 0 0 0 ;0 1e-6 0 0 ;0 0 1e-6 0 ;0 0 0 1e-6 ]
Rk=0.09*[1 0;0 1]
E=4300180000*[1e-6 0 0 0 0 ;0 1e-6 0 0 0 ;0 0 1e-6 0 0 ;0 0 0 1e-2 0; 0 0 0 0 1e-5]
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]朱玉.基于滑模自适应的PMSM无速度传感器矢量控制研究[D].辽宁工程技术大学[2024-01-22].
[2]刘芳璇,崔晶,李益民,等.基于自适应模糊滑模的PMSM无速度传感控制研究[J].电子设计工程, 2014, 22(14):4.DOI:10.3969/j.issn.1674-6236.2014.14.022.
[3]黄靖宇,高欣.基于模糊控制的PMSM无传感器控制参数整定研究[J]. 2016.
















 172
172











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









