







最近在做一个项目,需要在Windows 系统环境vs c++使用上位机对UR5e机械臂进行二次开发,在这里使用官方推荐的一个控制机械臂的库-UR-Rtde,配置过程中,按照官方给的流程进行配置,出现过各种bug,踩了不少坑 ,并且网上关于这方面的资料也是少之又少,因此,简单记录一下自己配置的过程,分享给大家,希望对大家有帮助。
下载VS2019版本+boost1_75_0+RTDE(3.9~4.5)
一、打开 rtde官网:Examples — ur_rtde 1.5.4 documentation (sdurobotics.gitlab.io)
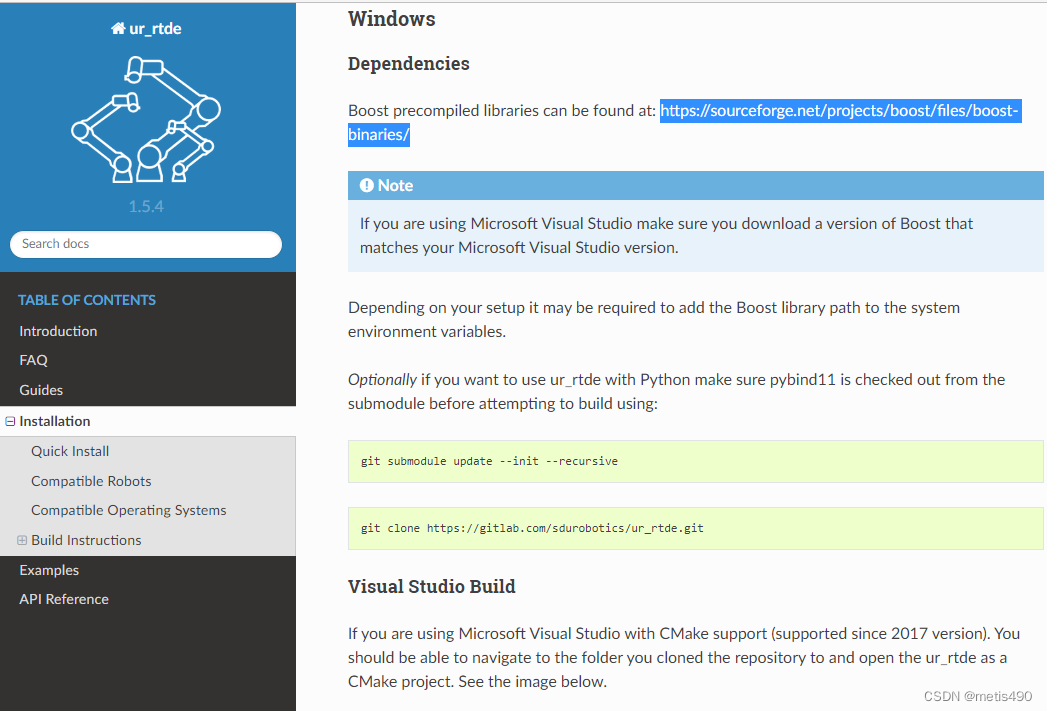
下载boost(1.75.0_msvc_14.2):
boost官网:Boost C++ Libraries - Browse /boost-binaries at SourceForge.net
下载binaries文件(可执行文件),下载完双击即可,然后将boost库配置到环境变量

二、下载RTDE库(千万不要在终端直接使用git下载,官网下载的是最新版本)
下载完成后,将RTDE库和boost库放在同一级根目录下
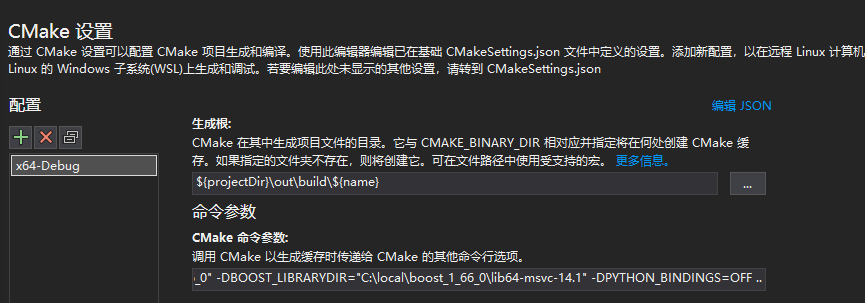
三、打开VS2019,点击文件——打开——Cmake——URrtde目录下CMakelists文件,配置Cmake命令参数
-DBOOST_LIBRARYDIR="C:\local\boost_1_75_0\lib64-msvc-14.2" -PYTHON_BINDINGS=OFF
点击配置文件-生成
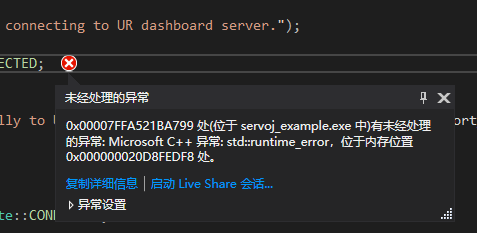
三、点击rtde库中的案例,将ip地址改成UR控制器中设置的ip地址,配置完成后运行程序,出现下面的情况说明配置成功















 486
486











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









