









在移植别人的项目时,遇到的配置环境的相关问题,便记录下来,期间查找了很多资料,没有一个系统的解决方案,写下这篇博客记录总结一下。在我们移植UR机器人相关的代码时,往往会遇到三个主要的问题:第一,移植过来的项目保留的原来的路径报错;第二,需要安装ur_rtde接口;第三,配置相关环境。自己新手一个,主要是看了很多的博客,想把自己的经验总结一下,踩了很多的坑。
一、路径出错
https://blog.csdn.net/qq_34801642/article/details/103060715
当我们移植别人的项目时,由于相关文件还存在着别人的目录,会出现禁用IntelliSense的错误。参考以上链接,打开.vcxproj文件,将不属于自己电脑的<Improt Project>路径删除,报错即消失,具体可参考上面链接。
二、安装ur_rtde
参考链接:Windows10安装UR_RTDE - Eric_cobot - 博客园(cnblogs.com)
本人就是采用上面的链接安装成功的,使用的是VS2022+BOOST1.74,安装成功。安装ur_rtde库之前就需要安装好boost库,因为ur_rtde中需要用到boost库中的内容,否则会报错。
1.安装BOOST:Boost C++ Libraries - Browse /boost-binaries at SourceForge.net

在安装boost的过程中,我尝试过两种方法,一是直接下载exe文件不用编译,二是下载源代码zip压缩包文件,自己编译。推荐使用方法一,直接下载对应VS版本的boost的exe文件,运行安装即可。在此期间遇到一个问题,当我下载了boost_17_4_0-msvc-14.1-64.exe后报错LNK1104: 无法打开文件“libboost_date_time-vc142-mt-gd-x64-1_72.lib“,解决方法:继续下载了boost_17_4_0-msvc-14.2-64.exe。报错消失了,问题解决。
可参考链接:
2.安装ur_rtde
安装ur_rtde有两种方法,一是进入github网站下载,这里建议把ur_rtde跟boost的代码放在同一个路径下,避免出错和后面配置的方便。SDU Robotics / ur_rtde · GitLabA C++ interface for controlling and receiving data from an UR robot using the Real-Time Data Exchange (RTDE) interface of the robot. The interface can also be used...![]() https://gitlab.com/sdurobotics/ur_rtde.git
https://gitlab.com/sdurobotics/ur_rtde.git
二是推荐使用git安装ur_rtde,在Windows10下不能直接采用git命令安装,需要安装git工具
安装完成后,直接执行以下命令下载即可,git会默认安装在C盘,如果想安装在其他盘,打开你想安装的路径,右键选择"open git bash here"。若没安装cmake,需要安装cmake。
git clone https://gitlab.com/sdurobotics/ur_rtde.git #下载ur_rtde源码
cd ur_rtde #进入所在目录(需要根据自己clone到的代码路径进行修改)
mkdir build #该目录下创建build
cd build #进入build
cmake .. -DBOOST_ROOT="<Path:\to\boost_<version>>" -DBOOST_LIBRARYDIR="<Path:\to\boost_<VERSION>\<COMPILER>>" -DPYTHON_BINDINGS=OFF
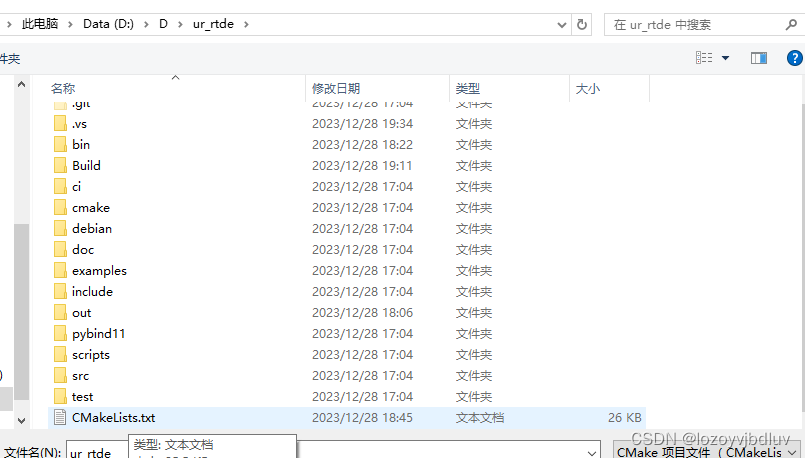
若cmake这步成功,即说明ur_rtde与boost库链接成功,打开ur_rtde\build\,找到ur_rtde.sln文件
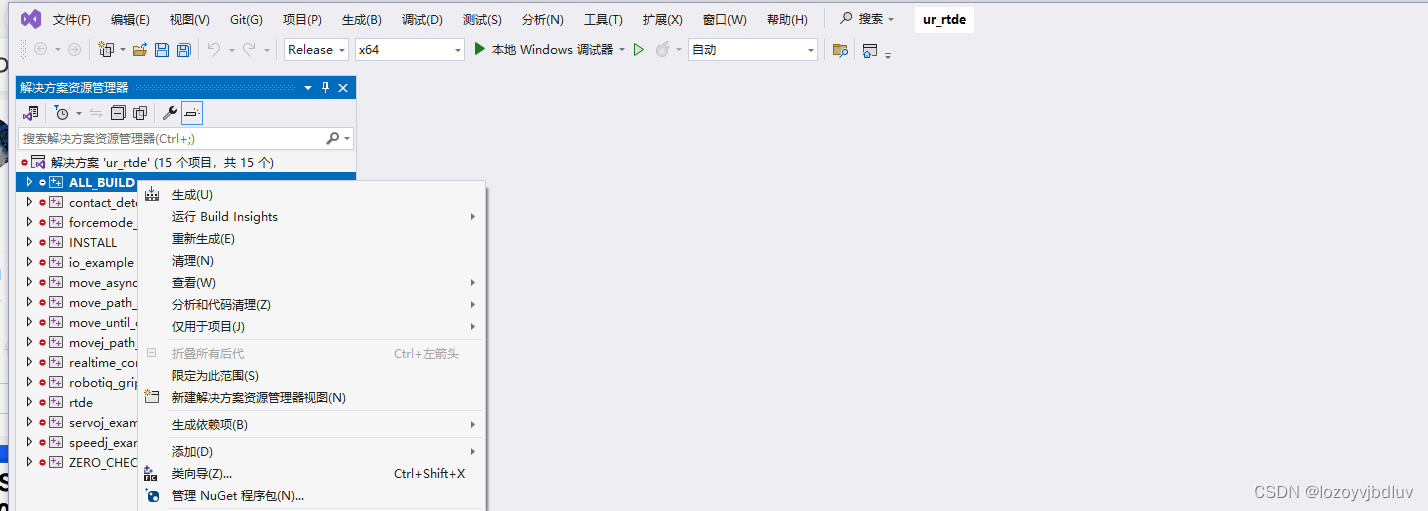
右键点击生成,没报错即可,随后就会在你选择的调试方式,Debug/Release调试方式中的文件中找到相关的rtde.dll文件,rtde.dll文件就是我们需要的文件。
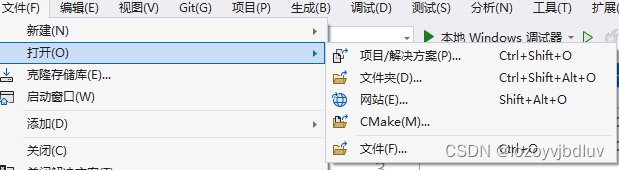
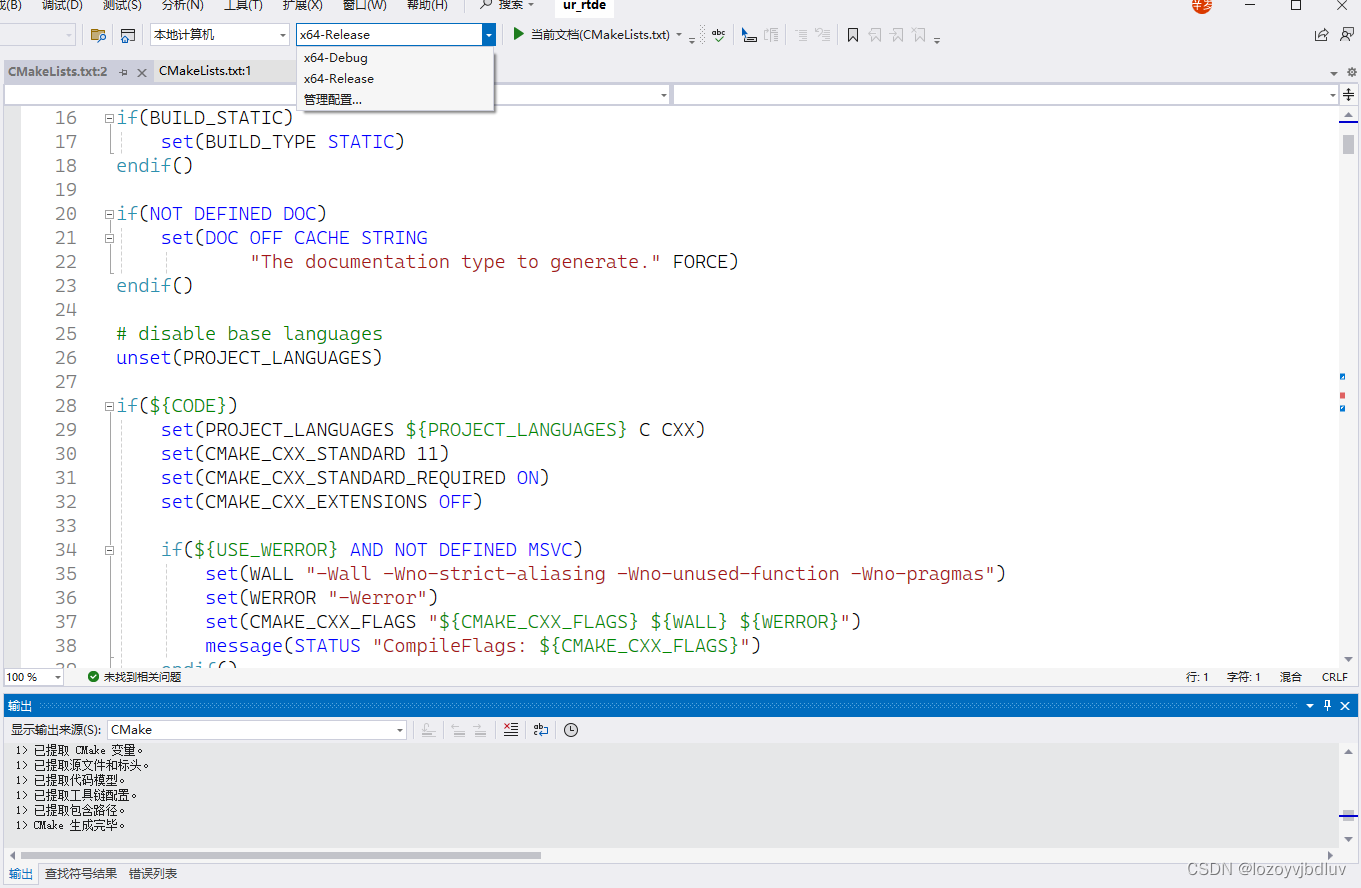
关于选择不同的调试方式,可以在vs中进行操作,若以上述命令cmake生成的是Debug模式,可以从vs中,上方文件选择打开CMake,选择ur_rtde中的CmakeLists.txt。相当于cmake生成有两种方式,一种是直接采用git命令生成,默认生成debug模式,生成的内容可以在ur_rtde\build\Debug找到;但若需要调整cmake的生成方式,建议选择vs执行cmake文件,按照下图操作即可。
如图,可以选择不同的cmake生成模式,点击管理配置
 左侧点击+号 可以添加不同的cmake生成方式,我移植过来的项目是选择的是x64-Release,之前默认使用的是x64-Debug,,运行会出现报错,之后修改过后,成功运行。
左侧点击+号 可以添加不同的cmake生成方式,我移植过来的项目是选择的是x64-Release,之前默认使用的是x64-Debug,,运行会出现报错,之后修改过后,成功运行。

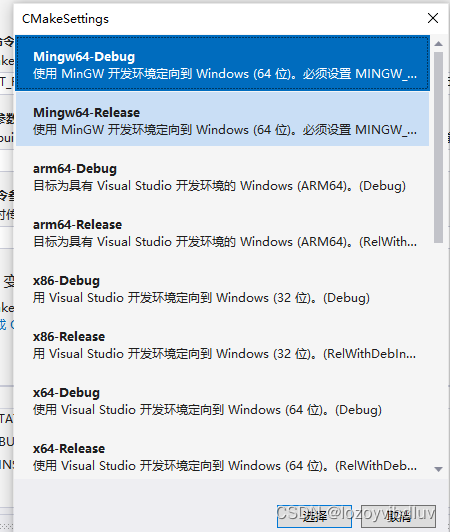
再进行cmake设置,还需要添加命令参数,命令参数的形式就是,绿色部分按照自己的路径跟版本号修改即可。
-DBOOST_ROOT="C:\local\boost_1_66_0"
-DBOOST_LIBRARYDIR="C:\local\boost_1_66_0\lib64-msvc-14.1" -DPYTHON_BINDINGS=OFF.. 我的内容作为补充,主要是参考该链接,最终的目的是得到rtde.dll文件。主要的顺序就是,先安装ur_rtde->建立build文件夹->cmake命令进行编译->vs选取调试方式并添加命令参数->打开ur_rtde.sln文件进行build生成,从而得到rtde.dll文件。后续进行配置即可。参考链接:Windows10安装UR_RTDE - Eric_cobot - 博客园(cnblogs.com)
三、配置环境
配置环境我是完全参照 Windows10安装UR_RTDE总结_ur_rtde urcl-CSDN博客
期间出现一个问题,在添加rtde.dll文件时,按照该链接的方式,还是会报错找不到rtde.dll文件,解决方法:
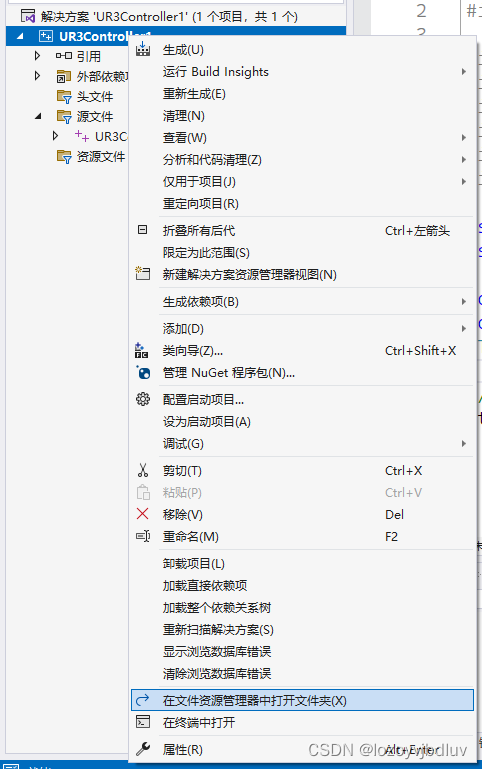

直接将rtde.dll文件添加在从文件资源管理器中打开文件夹的那个路径 ,成功运行。如若需要配置机器人ip也可以参照该链接。
以上就是我移植UR机器人项目到自己电脑上所遇到的问题和总结,如果还有其他问题,大家可以在评论区交流。















 933
933











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









