







 ASAM OpenDRIVE是一个用于自动驾驶仿真应用的静态道路交通网络标准,描述道路几何形状及相关特征,包括车道、交叉路口等。OpenDRIVE使用XML格式,允许数据扩展并确保不同应用间互通性。它与OpenCRG和OpenSCENARIO协同工作,分别处理静态内容、路面细节和动态场景。版本1.6保持向后兼容性。
ASAM OpenDRIVE是一个用于自动驾驶仿真应用的静态道路交通网络标准,描述道路几何形状及相关特征,包括车道、交叉路口等。OpenDRIVE使用XML格式,允许数据扩展并确保不同应用间互通性。它与OpenCRG和OpenSCENARIO协同工作,分别处理静态内容、路面细节和动态场景。版本1.6保持向后兼容性。
1、概要
ASAM OpenDRIVE描述了自动驾驶仿真应用所需的静态道路交通网络,并提供了标准交换格式说明文档。该标准的主要任务是对道路及道路上的物体进行描述。OpenDRIVE说明文档涵盖对如道路、车道、交叉路口等内容进行建模的描述,但其中并不包含动态内容。
OpenDRIVE格式使用文件拓展名为xodr的可扩展标记语言(XML)作为描述路网的基础。存储在OpenDRIVE文件中的数据描述了道路的几何形状以及可影响路网逻辑的相关特征(features),例如车道和标志。OpenDRIVE中描述的路网可以是人工生成或来自于真实世界的。OpenDRIVE的主要目的是提供可用于仿真的路网描述,并使这些路网描述之间可以进行交换。
该格式将通过节点(nodes)而被构建,用户可通过自定义的数据扩展节点。这使得各类应用(通常为仿真)具有高度的针对性,同时还保证不同应用之间在交换数据时所需的互通性。
2、惯例
用户可以直接定义某些数据的数量单位。如果数量单位没有被明确定义或无法被解析,则将默认采用SI单位。以下单位可(may)用于直接定义数据:

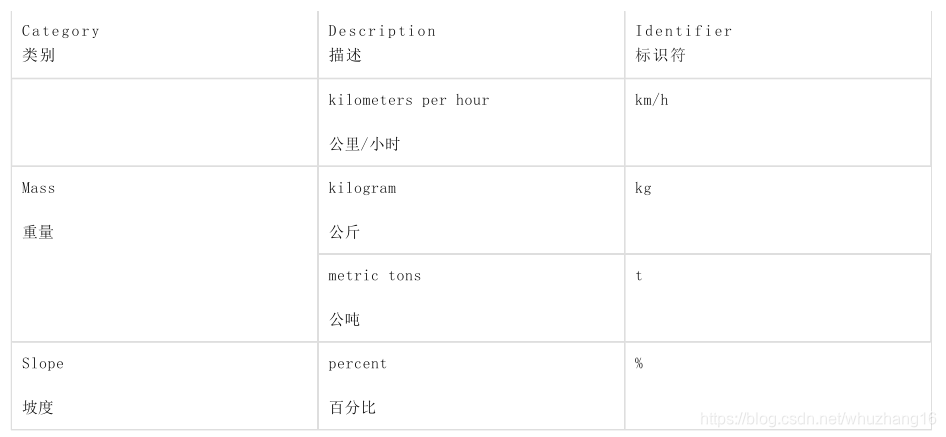
地理位置用空间坐标系定义的单位来说明,可遵循例如WGS 84 – EPSG 4326 坐标系。
这些可选的单位只能作为指示牌以及速度标明使用。而不能作为通用单位使用,比如不能用来定
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1951
1951

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









