







|作者版权所有,未经许可谢绝转载,转载请联系adsimtest@163.com。
“ 本系列尝试对ASAM OpenX系列标准进行介绍。这是第一篇:介绍OpenDRIVE地图数据格式所能描述的内容和思路。”
01 概述
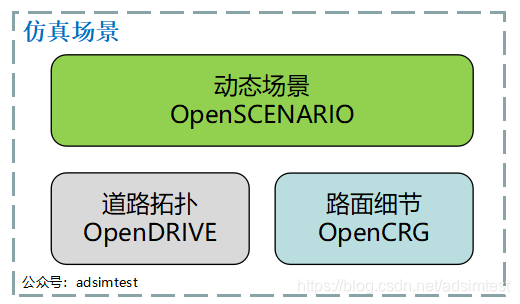
作为一个完整的仿真测试场景描述方案,OpenX系列标准包括:OpenDRIVE、OpenSCENARIO和OpenCRG。仿真测试场景的静态部分(如道路拓扑结构、交通标志标线等)由OpenDRIVE文件描述,道路的表面细节(如坑洼、卵石路等)由OpenCRG文件描述,仿真测试场景的动态部分(如交通车的行为)由OpenSCENARIO文件描述。如下图所示:
OpenDRIVE是一种高精地图格式,2006年由德国VIRES公司发布,并反复迭代,期间德国戴姆勒驾驶模拟器部门和德国宇航中心DLR也发挥了很大作用。OpenDRIVE 1.5版本于2019年发布。2018年9月,OpenDRIVE的开发团队将维护工作转交给德国ASAM标准化组织,1.6及之后的版本由ASAM负责。1.6版本已由ASAM在2020年3月发布,本文使用该版本进行介绍。
OpenDRIVE开发起因是VIRES公司在提供驾驶模拟器方案时,发现不同工具的道路数据格式中需要包含逻辑内容是基
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 6319
6319











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









