







前言
Eigen是一个高层次的C ++库,有效支持 得到的线性代数,矩阵和矢量运算,数值分析及其相关的算法。
配置
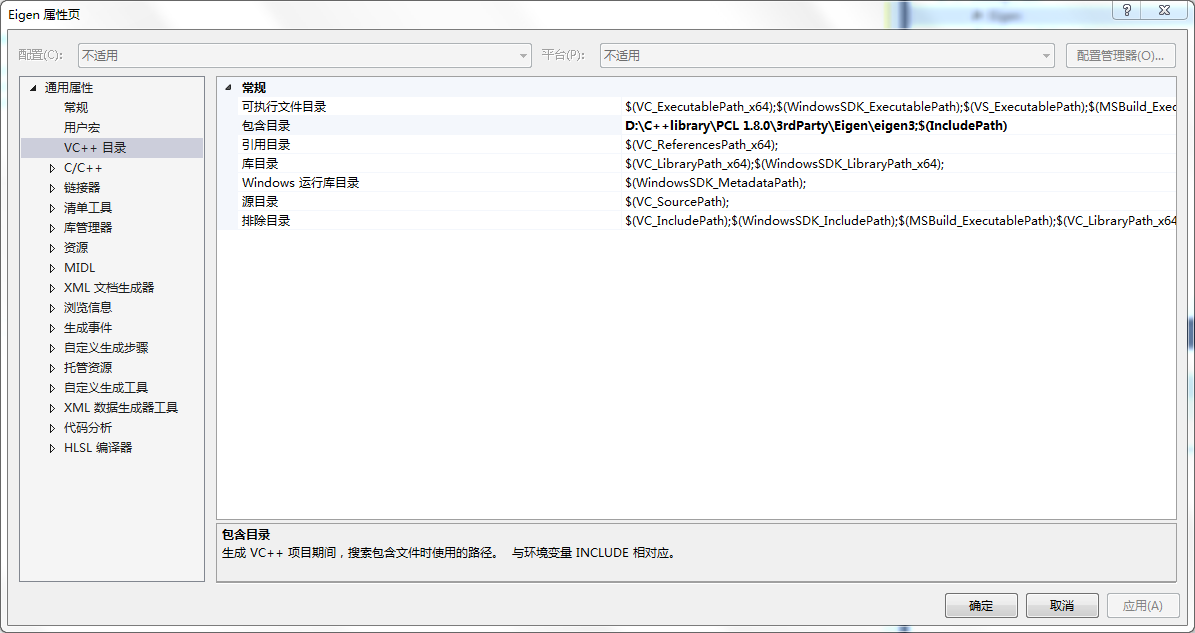
关于Eigen库的配置只需要在属性表包含目录中添加Eigen路径即可。
例子
Example 1:
#include <iostream>
#include <Eigen/Dense>
void main()
{
Eigen::MatrixXd m(2, 2); //声明一个MatrixXd类型的变量,它是2*2的矩阵,未初始化
m(0, 0) = 3; //将矩阵第1个元素初始化3
m(1, 0) = 2.5; //将矩阵第3个元素初始化3
m(0, 1) = -1;
m(1, 1) = m(1, 0) + m(0, 1);
std::cout << m << std::endl;
}Eigen头文件定义了很多类型,但对于简单的应用程序,可能只使用MatrixXd类型。 这表示任意大小的矩阵(MatrixXd中的X),其中每个条目是双精度(MatrixXd中的d)。 Eigen / Dense头文件定义了MatrixXd类型和相关类型的所有成员函数。 在这个头文件中定义的所有类和函数都在特征名称空间中。
Example 2:
#include <iostream>
#include <Eigen/Dense>
using namespace Eigen;
using namespace std;
int main()
{
MatrixXd m = MatrixXd::Random(3,3); //使用Random随机初始化3*3的矩阵
m = (m + MatrixXd::Constant(3,3,1.2)) * 50;
cout << "m =" << endl << m << endl;
VectorXd v(3); //这表示任意大小的(列)向量。
v << 1, 2, 3;
cout << "m * v =" << endl << m * v << endl;
}#include <iostream>
#include <Eigen/Dense>
using namespace Eigen;
using namespace std;
int main()
{
Matrix3d m = Matrix3d::Random(); //使用Random随机初始化固定大小的3*3的矩阵
m = (m + Matrix3d::Constant(1.2)) * 50;
cout << "m =" << endl << m << endl; Vector3d v(1,2,3);
cout << "m * v =" << endl << m * v << endl;
}Matrix&Vector
Example 3:
#include <iostream>
#include <Eigen/Dense>
using namespace Eigen;
int main()
{
MatrixXd m(2,2);
m(0,0) = 3;
m(1,0) = 2.5;
m(0,1) = -1;
m(1,1) = m(1,0) + m(0,1);
std::cout << "Here is the matrix m:\n" << m << std::endl;
VectorXd v(2);
v(0) = 4;
v(1) = v(0) - 1;
std::cout << "Here is the vector v:\n" << v << std::endl;
}逗号初始化
Example 4:
Matrix3f m;
m << 1, 2, 3, 4, 5, 6, 7, 8, 9;
std::cout << m;通过Resize调整矩阵大小
矩阵的当前大小可以通过rows(),cols()和size()检索。 这些方法分别返回行数,列数和系数数。 通过resize()方法调整动态大小矩阵的大小。
Example 5:
#include <iostream>
#include <Eigen/Dense>
using namespace Eigen;
int main()
{
MatrixXd m(2,5); //初始化大小2*5
m.resize(4,3); //重新调整为4*3
std::cout << "The matrix m is of size " << m.rows() << "x" << m.cols() << std::endl;
std::cout << "It has " << m.size() << " coefficients" << std::endl;
VectorXd v(2); v.resize(5);
std::cout << "The vector v is of size " << v.size() << std::endl;
std::cout << "As a matrix, v is of size " << v.rows() << "x" << v.cols() << std::endl;
}通过赋值调整矩阵大小
Example 6:
MatrixXf a(2, 2);
std::cout << "a is of size " << a.rows() << "x" << a.cols() << std::endl;
MatrixXf b(3, 3);
a = b;
std::cout << "a is now of size " << a.rows() << "x" << a.cols() << std::endl;Eigen + - * 等运算
Eigen通过通用的C ++算术运算符(例如+, - ,)或通过特殊方法(如dot(),cross()等)的重载提供矩阵/向量算术运算。对于Matrix类(矩阵和向量) 只被重载以支持线性代数运算。 例如,matrix1 matrix2表示矩阵矩阵乘积。
Example 7:
#include <iostream>
#include <Eigen/Dense>
using namespace Eigen;
int main()
{
Matrix2d a; a << 1, 2, 3, 4;
MatrixXd b(2,2);
b << 2, 3, 1, 4;
std::cout << "a + b =\n" << a + b << std::endl;
std::cout << "a - b =\n" << a - b << std::endl;
std::cout << "Doing a += b;" << std::endl;
a += b;
std::cout << "Now a =\n" << a << std::endl;
Vector3d v(1,2,3);
Vector3d w(1,0,0);
std::cout << "-v + w - v =\n" << -v + w - v << std::endl;
}Example 8:
#include <iostream>
#include <Eigen/Dense>
using namespace Eigen;
int main()
{
Matrix2d a;
a << 1, 2, 3, 4;
Vector3d v(1,2,3);
std::cout << "a * 2.5 =\n" << a * 2.5 << std::endl;
std::cout << "0.1 * v =\n" << 0.1 * v << std::endl;
std::cout << "Doing v *= 2;" << std::endl; v *= 2;
std::cout << "Now v =\n" << v << std::endl;
}矩阵转置、共轭和伴随矩阵
MatrixXcf a = MatrixXcf::Random(2,2);
cout << "Here is the matrix a\n" << a << endl;
cout << "Here is the matrix a^T\n" << a.transpose() << endl;
cout << "Here is the conjugate of a\n" << a.conjugate() << endl;
cout << "Here is the matrix a^*\n" << a.adjoint() << endl;禁止如下操作:
a = a.transpose(); // !!! do NOT do this !!!但是可以使用如下函数:
a.transposeInPlace();此时a被其转置替换。
#include <iostream>
#include <Eigen/Dense>
using namespace Eigen;
int main()
{
Matrix2i a;
a << 1, 2, 3, 4;
std::cout << "Here is the matrix a:\n" << a << std::endl;
a = a.transpose(); // !!! do NOT do this !!!
std::cout << "and the result of the aliasing effect:\n" << a << std::endl;
}矩阵* 矩阵和矩阵* 向量操作
#include <iostream>
#include <Eigen/Dense>
using namespace Eigen;
int main()
{
Matrix2d mat; mat << 1, 2, 3, 4;
Vector2d u(-1,1), v(2,0);
std::cout << "Here is mat*mat:\n" << mat*mat << std::endl;
std::cout << "Here is mat*u:\n" << mat*u << std::endl;
std::cout << "Here is u^T*mat:\n" << u.transpose()*mat << std::endl;
std::cout << "Here is u^T*v:\n" << u.transpose()*v << std::endl;
std::cout << "Here is u*v^T:\n" << u*v.transpose() << std::endl;
std::cout << "Let's multiply mat by itself" << std::endl;
mat = mat*mat; std::cout << "Now mat is mat:\n" << mat << std::endl;
}点乘和叉乘
对于点积和叉乘积,需要使用dot()和cross()方法。
#include <iostream>
#include <Eigen/Dense>
using namespace Eigen;
using namespace std;
int main()
{
Vector3d v(1,2,3);
Vector3d w(0,1,2);
cout << "Dot product: " << v.dot(w) << endl;
double dp = v.adjoint()*w; // automatic conversion of the inner product to a scalar
cout << "Dot product via a matrix product: " << dp << endl;
cout << "Cross product:\n" << v.cross(w) << endl;
}#include <iostream>
#include <Eigen/Dense>
using namespace std;
int main()
{
Eigen::Matrix2d mat;
mat << 1, 2, 3, 4;
cout << "Here is mat.sum(): " << mat.sum() << endl;
cout << "Here is mat.prod(): " << mat.prod() << endl;
cout << "Here is mat.mean(): " << mat.mean() << endl;
cout << "Here is mat.minCoeff(): " << mat.minCoeff() << endl;
cout << "Here is mat.maxCoeff(): " << mat.maxCoeff() << endl;
cout << "Here is mat.trace(): " << mat.trace() << endl;
}数组的运算(未完待续)
Eigen最小二乘估计
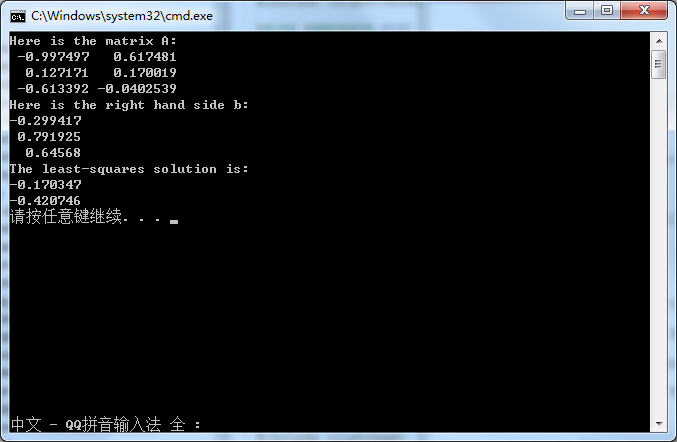
最小平方求解的最好方法是使用SVD分解。 Eigen提供一个作为JacobiSVD类,它的solve()是做最小二乘解。式子为Ax=b
经过和Matlab对比。
#include <iostream>
#include <Eigen/Dense>
using namespace std;
using namespace Eigen;
int main()
{
MatrixXf A = MatrixXf::Random(3, 2);
cout << "Here is the matrix A:\n" << A << endl;
VectorXf b = VectorXf::Random(3);
cout << "Here is the right hand side b:\n" << b << endl;
cout << "The least-squares solution is:\n" << A.jacobiSvd(ComputeThinU | ComputeThinV).solve(b) << endl;
}

















 2114
2114

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









