







前提:假设运载体为固定翼飞机,在飞行过程中攻角和侧滑角始终为零,即飞机仅存在沿机体坐标系( b 系)纵轴向的速度分量(沿横轴向和立轴向的速度均始终为零);飞机的角运动用欧拉角进行描述。
一、飞行轨迹设计
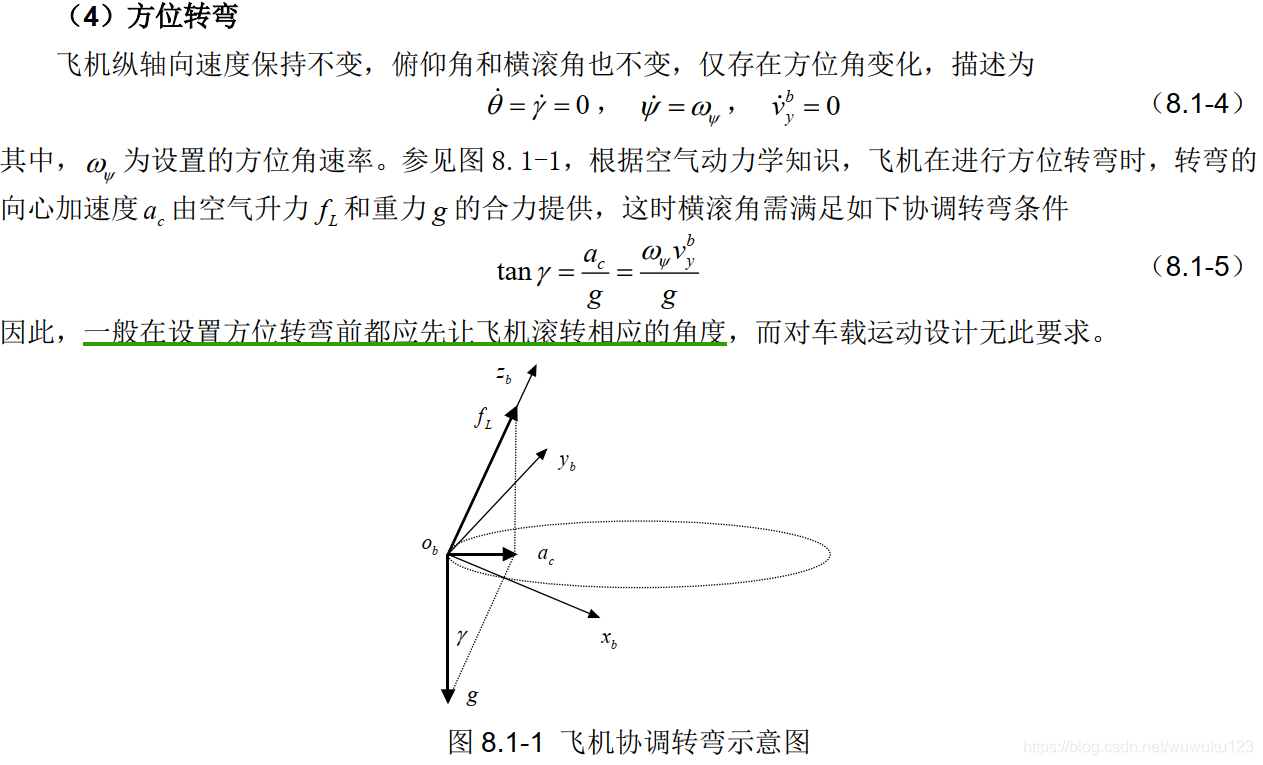
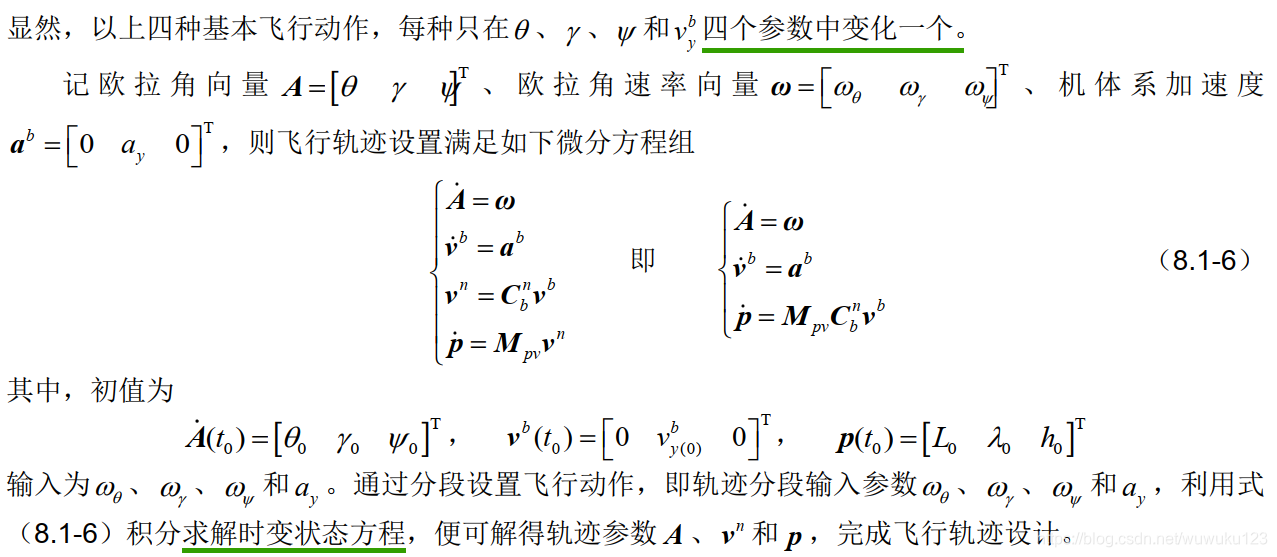
飞机常见的基本飞行动作包括加速、滚转、俯仰和转弯,下面逐一介绍它们的描述特征。主要描述量为:三个欧拉角速率、载体坐标系(b系)下纵轴的速度;


二、捷联惯导反演算法
由姿态、速度、位置导航参数求解角增量和速度增量的过程为捷联惯导反演算法。
涉及姿态的运算都采用四元数;其中双子样算法为:”单字样+前一周期“
1、角增量计算:
其中姿态更新算法为:


生成角增量函数:

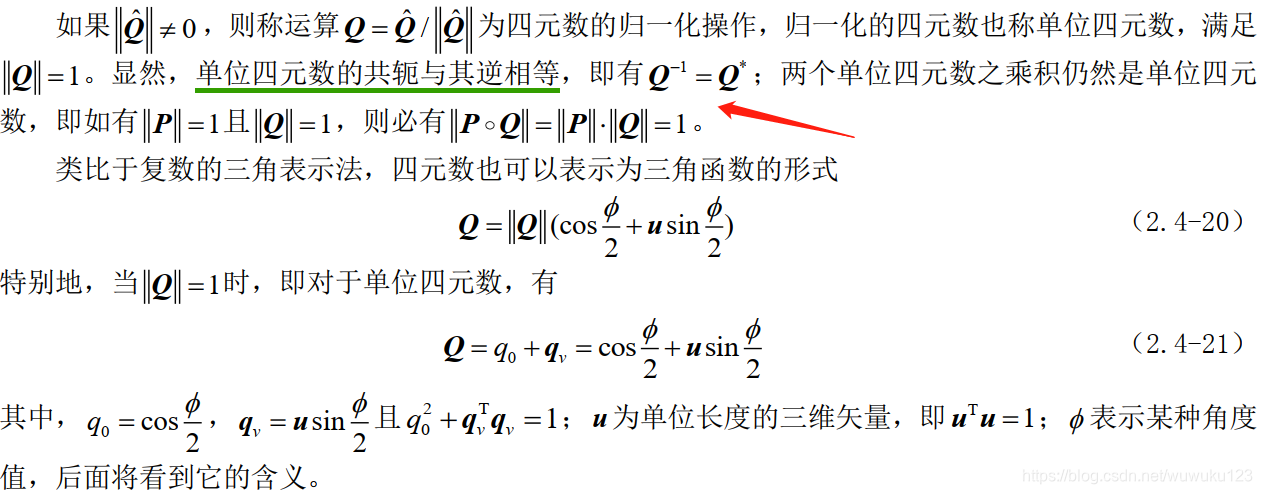
注意:单位四元数的共轭和逆相等,即:

2、速度增量计算:
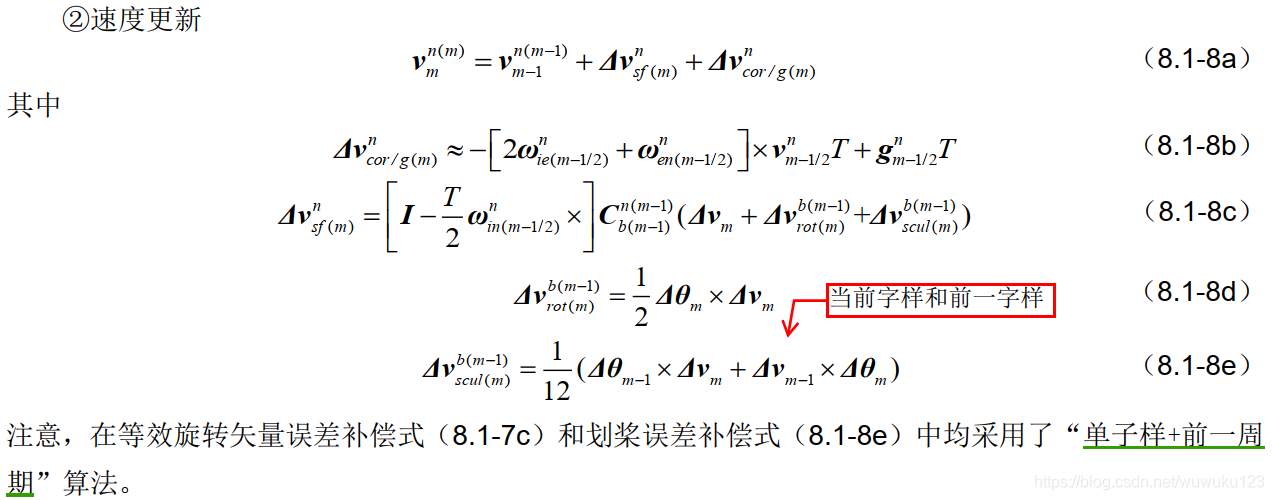
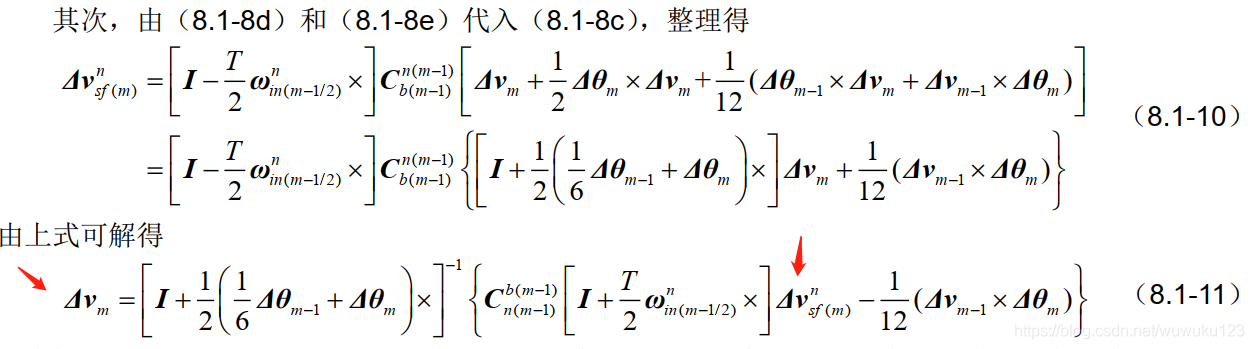
生成速度增量函数为:


















 3998
3998

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









