






相机参数标定是通过像平面特征点和已知世界坐标系对应点的坐标来估计相机的内外参数的过程。
1、相机标定的线性方法
相机标定的过程可以分为两个步骤:1) 计算出相机的透视投影矩阵2)根据透视投影矩阵估计相机的内外参数
透视投影矩阵估计
假设相机是无扭曲的理想相机,即像平面的横纵坐标夹角等于90度,根据之前的理论,我们知道透视投影矩阵M是非奇异矩阵。
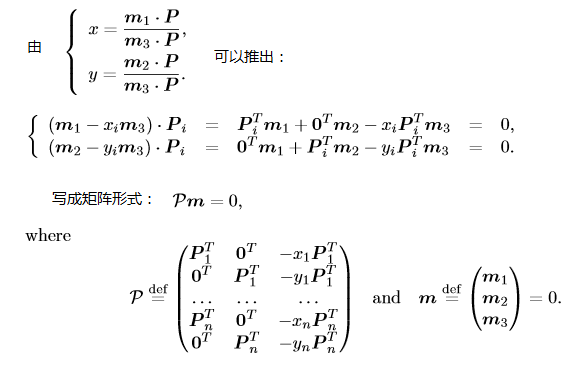
根据线性最小二乘法就可以计算出M矩阵。
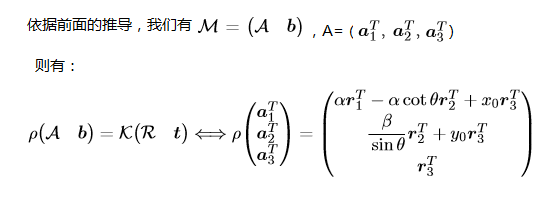
估计相机的内外参数
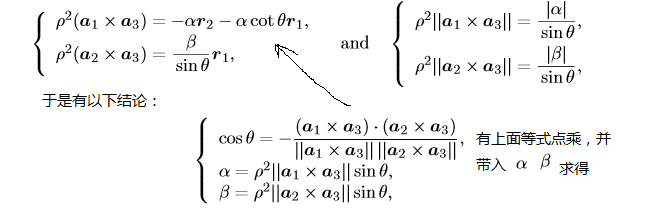
行向量之间相互点乘,可以得到以下结果:

向量之间相互叉乘,可以得到以下结果:
于是我们可以计算出r1、r2
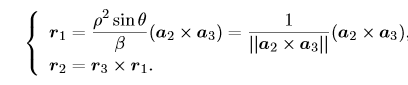
最后得到平移矩阵:

退化点
标注点的选择必须依照一定的规则,否则会引起标定过程失败,导致标定过程失败的点称之为退化点。
选择标注点的时候,选择的样本点不要位于同一个平面上。















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









