







-
https://www.ichaus.de/
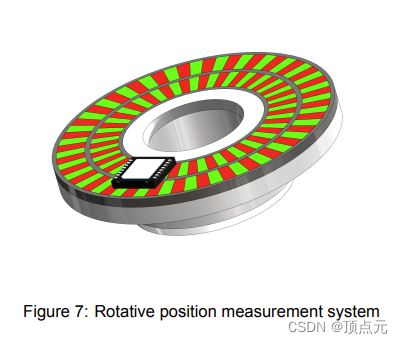
集成霍尔传感器,用于双轨道扫描
ic-MU150型号的编码器芯片:https://www.ichaus.de/upload/pdf/MU150_datasheet_D2en.pdf
-
https://www.magntek.com.cn/page/117.htm

-
https://ams.com/zh/ams-start
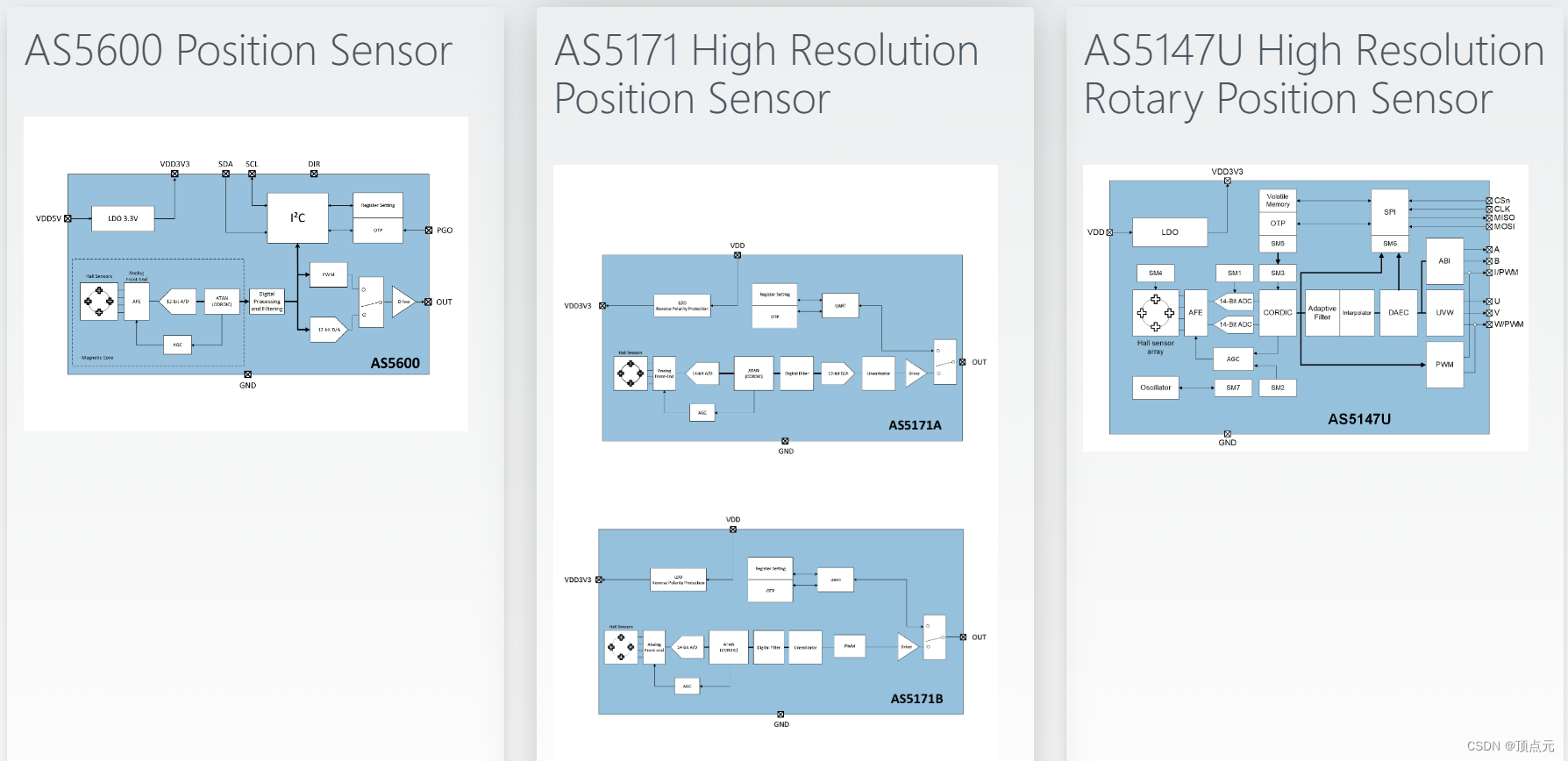
as5600 as5047 as5048系列编码器芯片:https://ams.com/zh/angle-position-on-axis
-
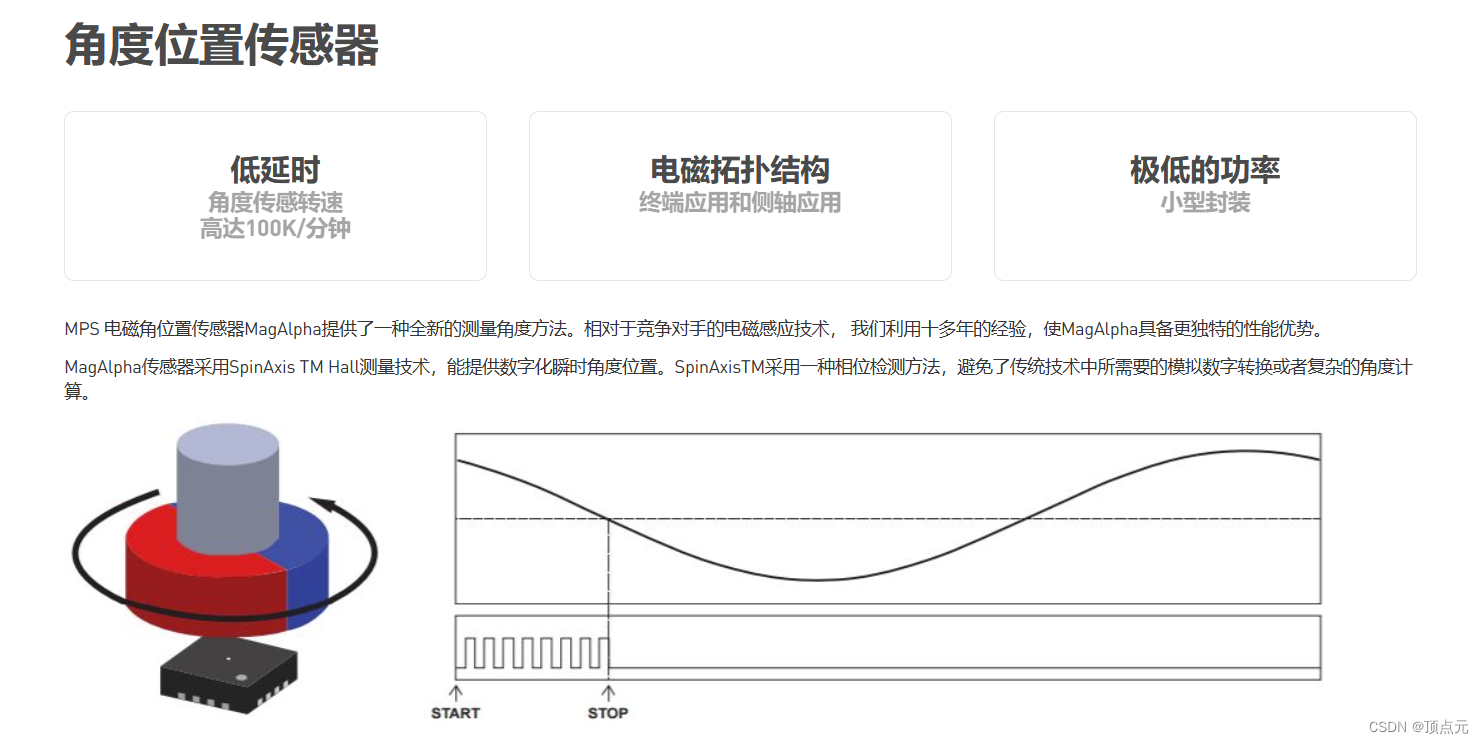
https://www.monolithicpower.cn/cn/products/sensors/angular-position-sensors.html














01-13
 3325
3325
08-10
08-02
“相关推荐”对你有帮助么?
-

 非常没帮助
非常没帮助 -

 没帮助
没帮助 -

 一般
一般 -

 有帮助
有帮助 -

 非常有帮助
非常有帮助
提交

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









