





1-2 开篇,运动学方程
3-8 横向控制 LQR
9-11 纵向控制 双PID
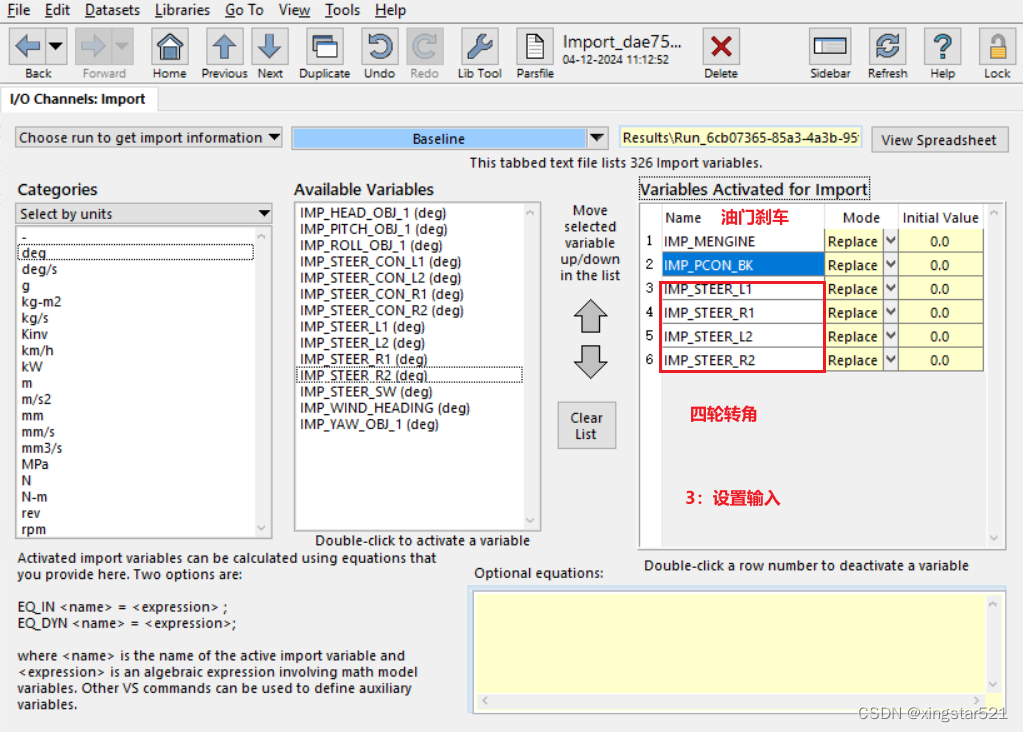
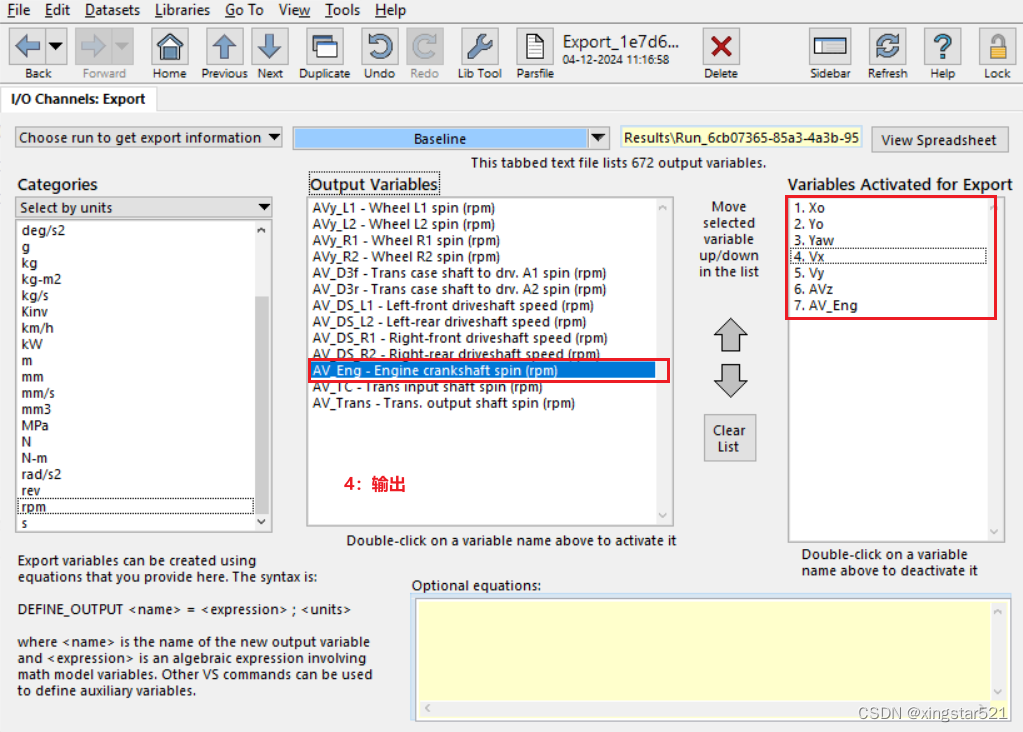
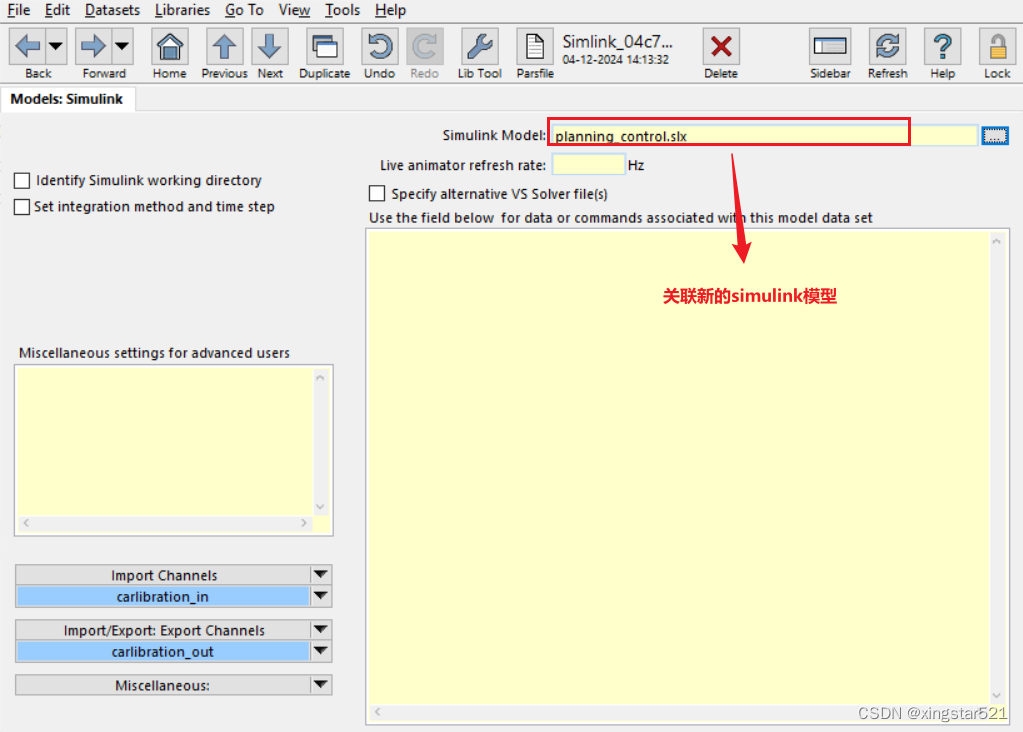
12 横纵向控制,规划接口
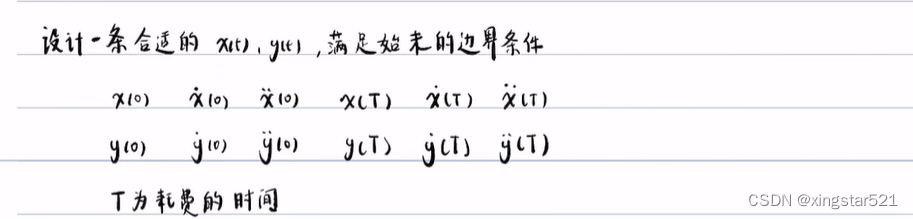
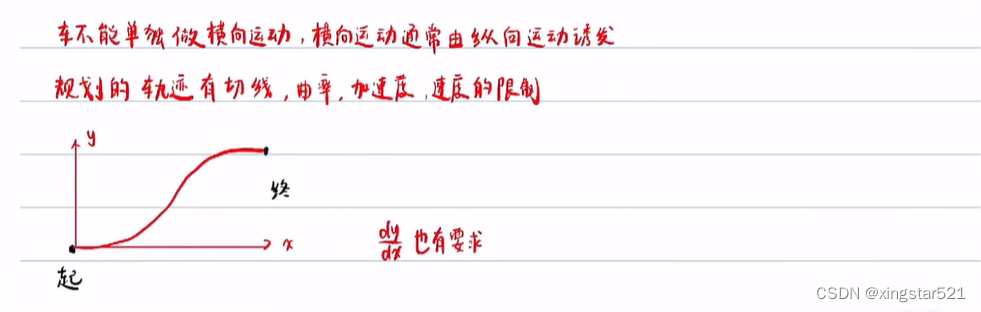
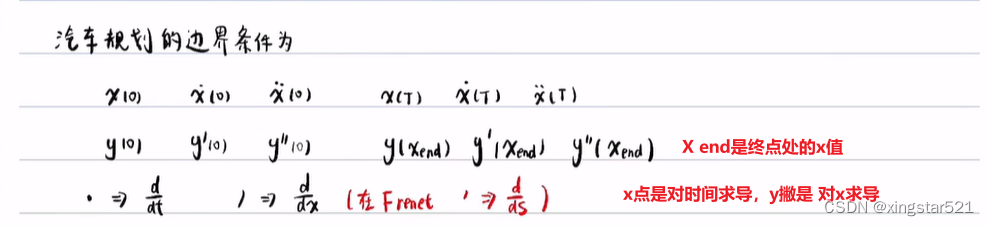
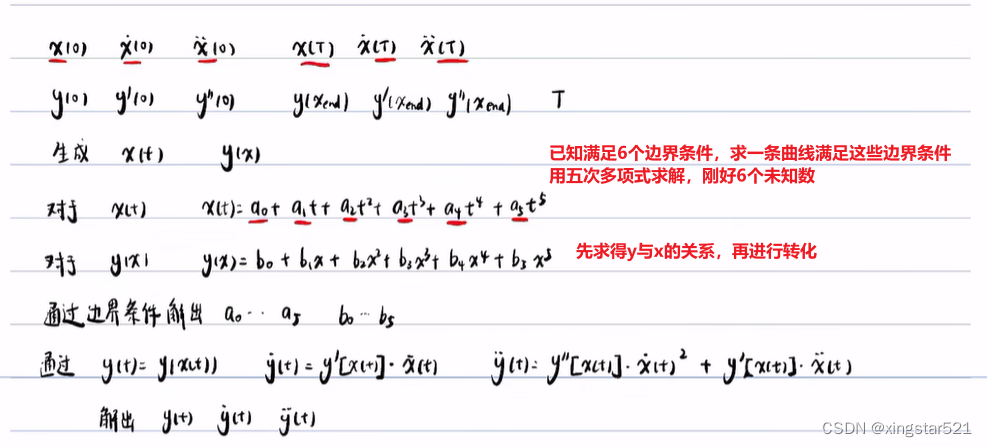
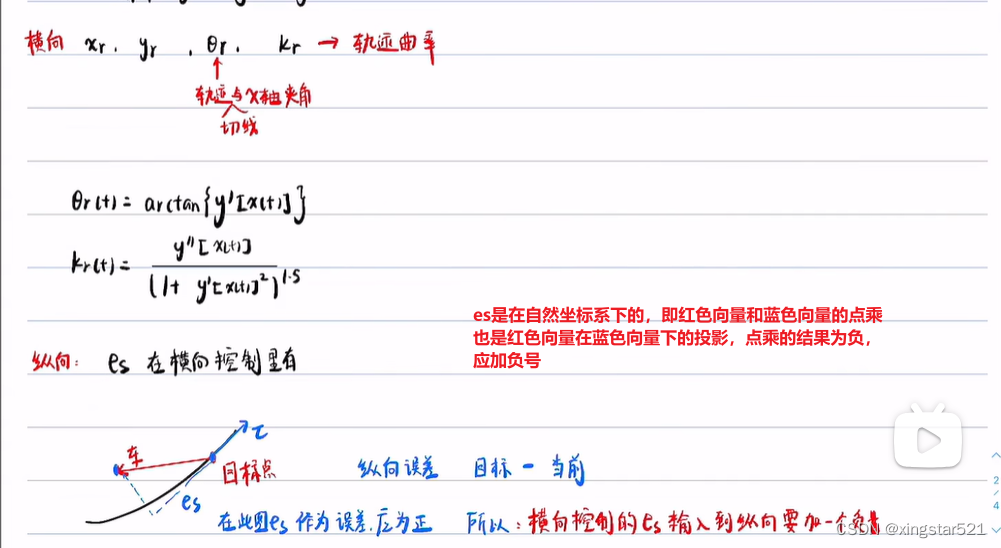
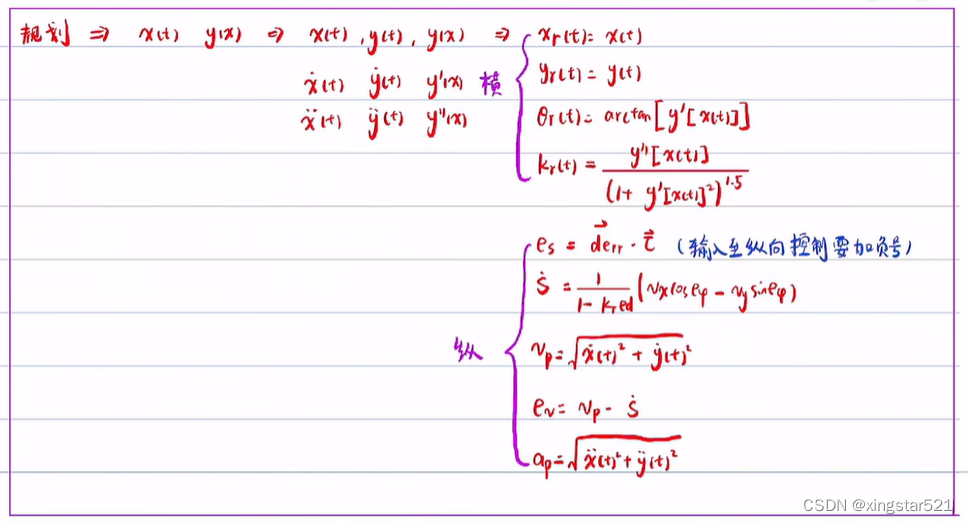
1、轨迹规划(理论部分

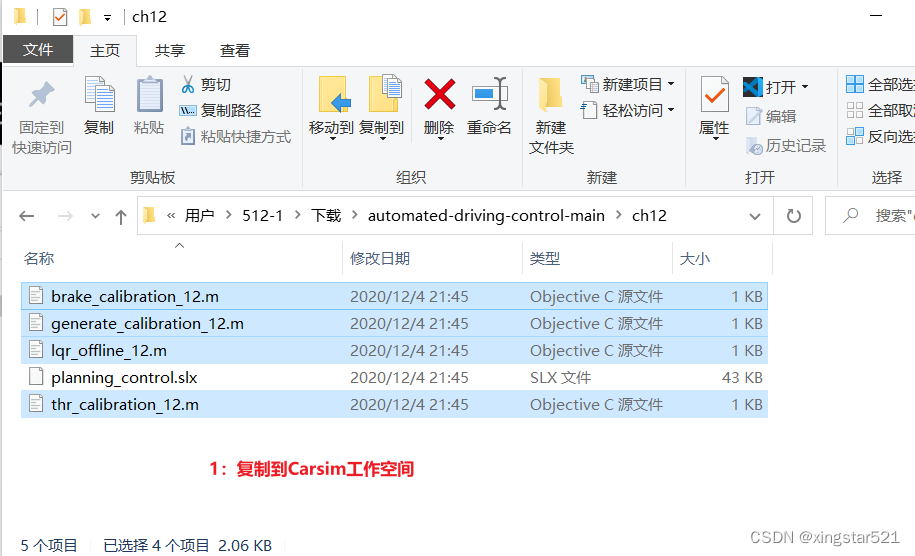
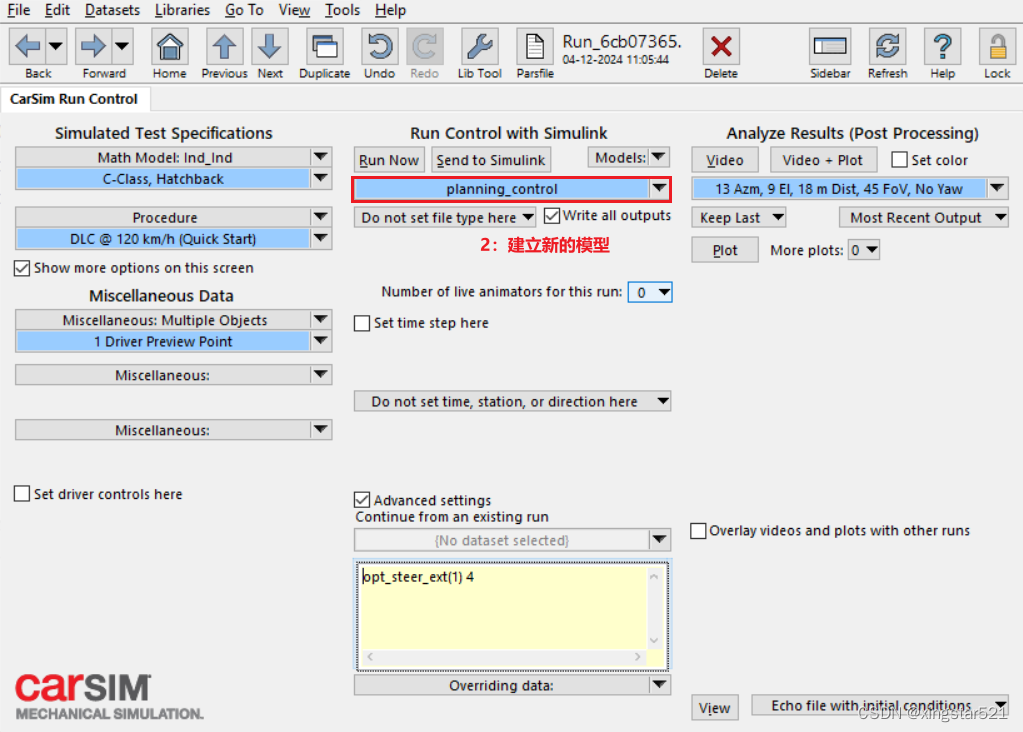
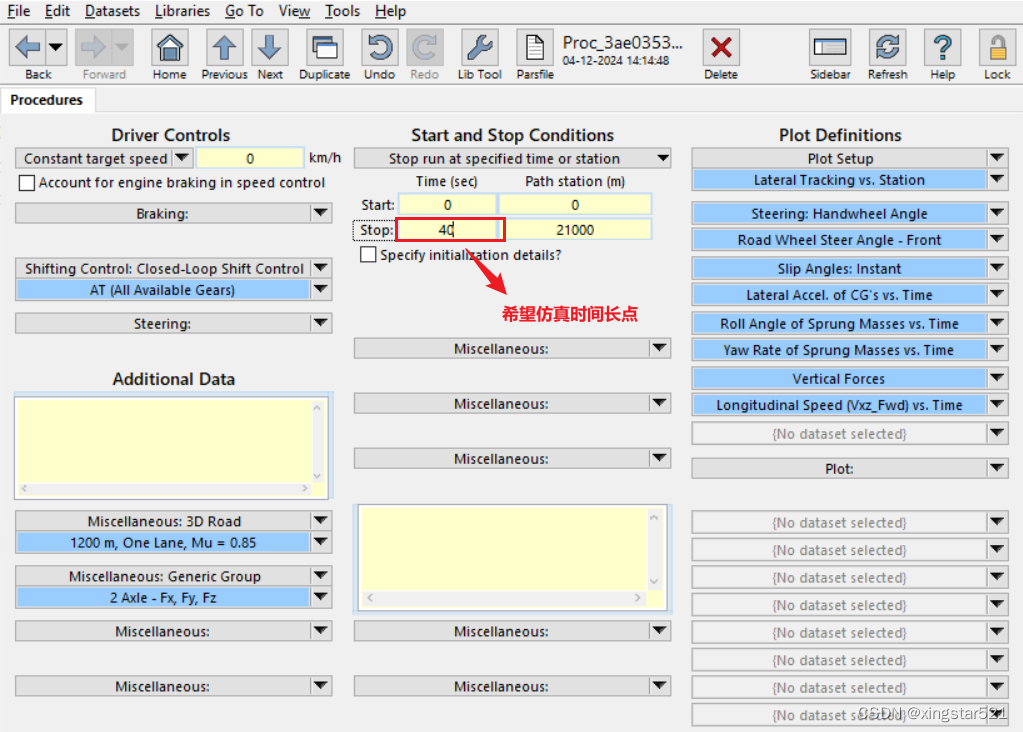
2、实践部分

 本文探讨了运动学方程在汽车控制中的应用,包括横向使用LQR方法和纵向采用双PID控制器。同时涉及了横纵向控制的规划接口和轨迹规划的理论基础,以及其实践案例。
本文探讨了运动学方程在汽车控制中的应用,包括横向使用LQR方法和纵向采用双PID控制器。同时涉及了横纵向控制的规划接口和轨迹规划的理论基础,以及其实践案例。
1-2 开篇,运动学方程
3-8 横向控制 LQR
9-11 纵向控制 双PID
12 横纵向控制,规划接口
 105
3926
1135
105
3926
1135

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























