






一、算法基本步骤
1.根据传感器及道路边界,生成可行驶区域ROI
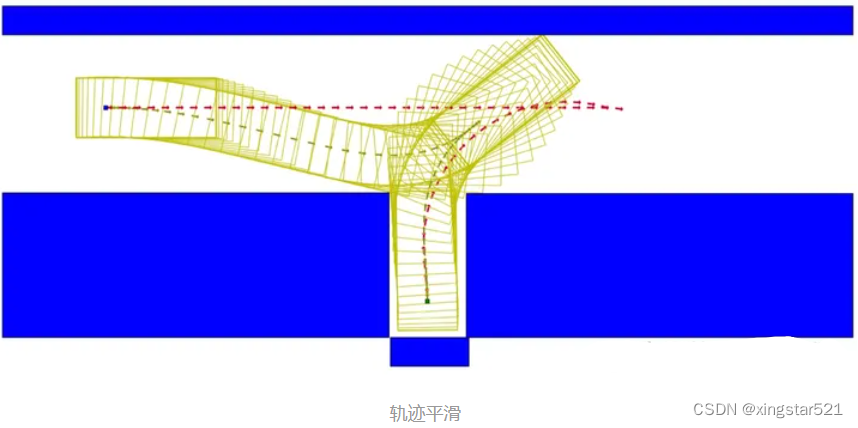
2. Hybird A* + RS曲线规划出一条粗糙的轨迹, 求出一个没有碰撞的参考解. 这条粗糙的轨迹可能会存在曲率突变, 这是不满足车辆的运动学要求的.
3. IAPS或者OBCA算法对轨迹进行进一步的平滑以满足车辆控制的需求. 图示中, 红色虚线是粗糙轨迹, 绿色虚线是平滑后的轨迹
2.OBCA算法
作用:对于原始路径存在的折线、不符合车辆运动学的问题,需要进一步平滑处理。来满足控制和乘坐舒适性的要求。
OBCA算法基于模型预测控制(MPC)建立模型,并用优化算法进行求解。它有如下几点优势:
- 可以加入障碍物约束. 这一点和RS曲线的解析求解不同, RS虽然可以求出最优的解析解, 但是没有办法考虑障碍物的碰撞的约束.
- 可以产生满足车辆运动学约束(曲率连续变化)的轨迹.
- 可以实现横纵向的联合规划(同时考虑速度对路径的影响)
2.1.MPC预测模型
下图展示了模型预测控制MPC:
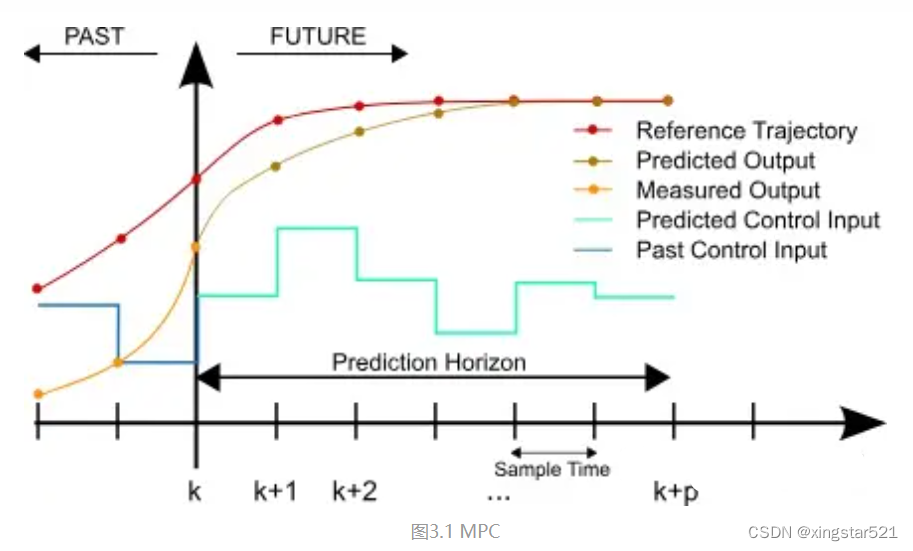
模型预测控制会通过一个采样时间将未来时域离散成多段, 在给定控制模型和参考值曲线, 计算使预测输出与实际输出最接近的输入序列, 并将输入的第一个分量作用于系统.
MPC问题→优化问题
1:首先设计目标函数(约束)
2:对未来状态进行优化求解
即设计MPC的预测模型。
车辆的运动学模型的示意图如下图所示: 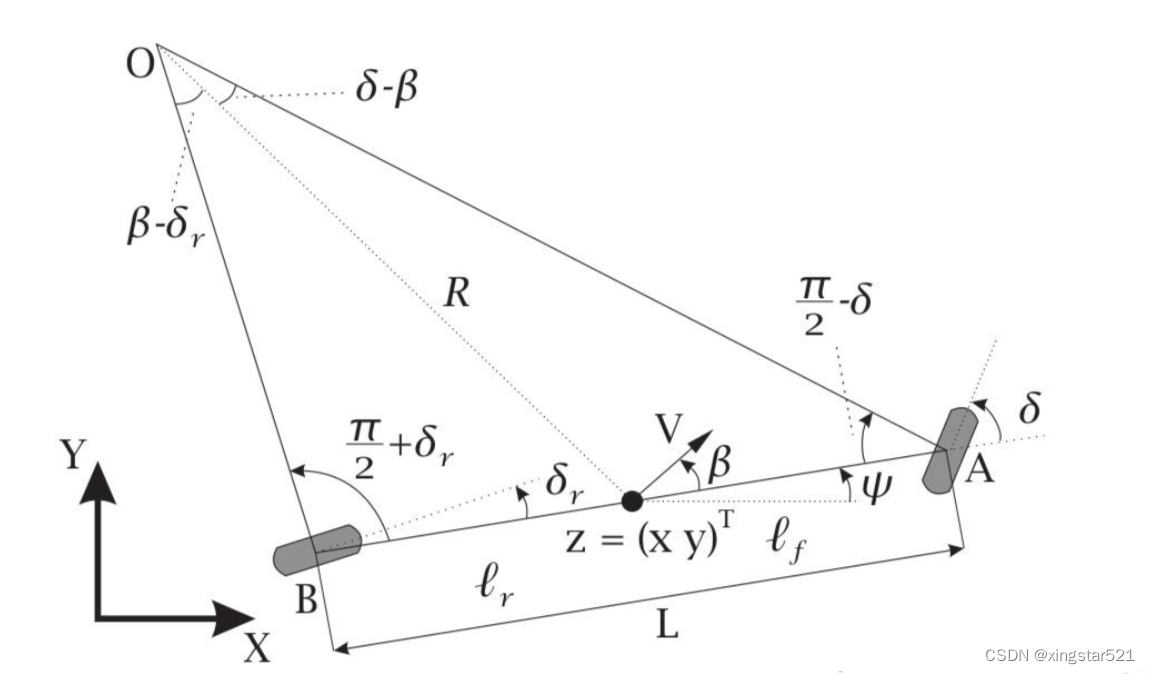
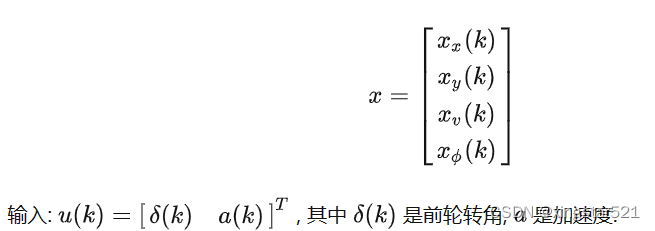
首先定义自车的状态变量, 包括自车第 时间的在笛卡尔坐标系下的坐标
, 车速
, 航向角
theta
. 
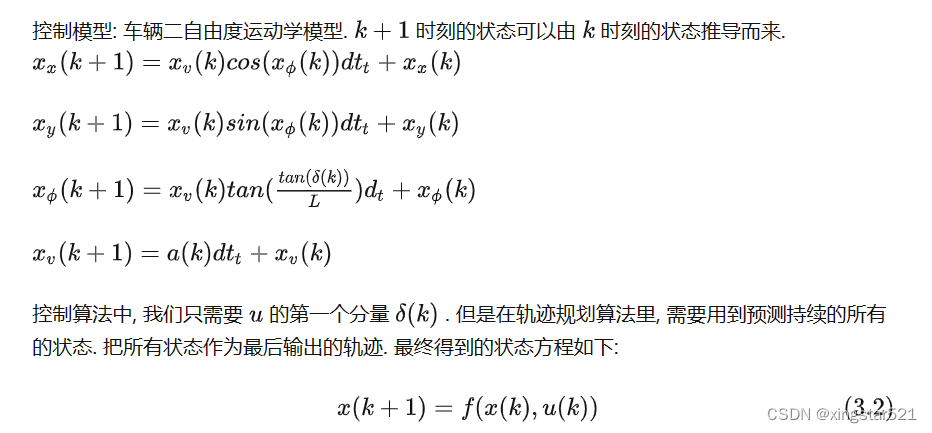
总结就是:知道第一个状态的位置信息和运动信息
就能得到下一状态的状态信息

















 5386
5386

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









