






论文原名<Rotational Projection Statistics for 3D Local Surface Description and ObjectRecognition>
此处只将原文中关于ROPS描述子的原理进行了翻译,部分综述、实验以及recognition请参考原文。
说明:ROPS是一种基于mesh的局部特征描述子,其主要应用为物体识别,所以在此之前应进行三角网格重建,以下内容皆基于此基础上进行。
翻译内容如下:
1.主要内容
本文提出了一种描述性强、鲁棒性(稳健性)强的特征描述方法和一种高效的三维目标识别算法。本文首先针对局部特征描述和目标识别提出了一种独特的、可重复的、鲁棒的LRF。通过对局部表面上所有点的散射矩阵进行特征值分解,结合符号消歧技术,构造了LRF。然后提出了一种新的特征描述,即旋转投影统计(ROPS)。
(i)利用局部上的所有点构建一个更稳健的LRF
(ii)ROPS:点云旋转投影到三个坐标平面,编码点云分别统计信息
(iii)基于LRF和ROPS的3D识别算法
2.LRF的构建
文章建立的LRF使用全部的点云,坐标轴由局部表面所有点构成的scatter matrix的特征值分解决定,通过将方向对齐大多数散点消除轴的正负号歧义。
2.1轴系建立
假设特征点p和一个支持半径r,以r做球体,包含在球体中的网格作为局部表面网格S,S包括N个三角形M个顶点,第i个三角形包括pi1,pi2,pi3位于三角形上的点可以如下表示:

0 ≤ s, t ≤ 1, and s + t ≤ 1,如下图所示

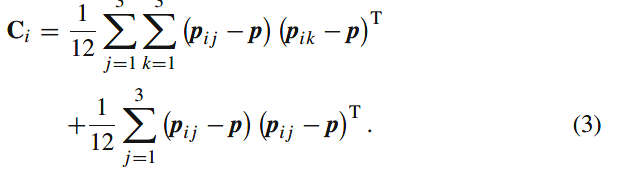
第i个三角形上所有点的scatter matrixCi可以如下表示,

使用pi的等式代入可得Ci
S的总的散布矩阵C是所有三角形带权Ci之和
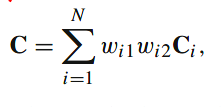
N是S中三角形的个数,wi1是第i个三角形的S的面积之比,为了增强不同网格分辨率的稳健性,×号代表叉乘

wi2表示特征点p到第i个三角形质心的距离,增强噪声的稳健性

分解C的特征向量
CV = EV
E是C的特征值a1,a2,a3的对角阵,V是a1,a2,a3由大到小所对应的特征向量,但是V的正负号是一个问题。
2.2符号消歧
为了避免LRF的符号歧义性,每个特征向量应指向scatter vectors的主方向(scatter vectors:由p点指向局面表面的所有点构成),因此每个特征向量的符号由特征向量和scatter vectors内积的符决定,定义一个v1~,
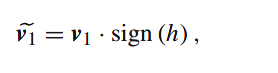
sign(.)表示提取实数正负号的函数

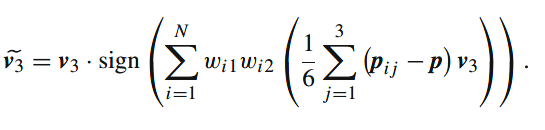
v2~=v3~×v1~,v1~,v2~,v3~分别表示X,Y,Z轴,p表示原点,这样就可以构建一个LRF了。
3.ROPS描述子
在p点给定一个support radius ,可以得到一个局部表面,我们已经定义了p的lrf,局部曲面s中三角形的顶点构成点云q。将点集相对于LRF变换实现旋转不变性(rotation invariance)具体做法如下:
先将点集绕x轴旋转一定角度,然后分别投影到XY,XZ,YZ平面(类似三视图,可以还原物体)记录下来。
将投影点集合在一个矩形中,并分成L*L个bins,计算每个bin中的点数,然后得到一个L*L的矩阵d,将d称为分布矩阵,d代表相邻点的二维分布,将d归一化,使所有bins之和等于1,以实现不同网格分辨率的不变性。
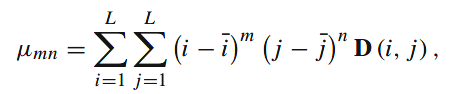
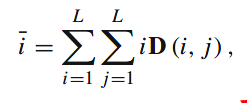
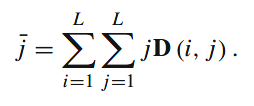
对分布矩阵d进行压缩,d的统计量包括中心矩和香农熵。
d的m+n阶中心矩定义如下:
香农熵:
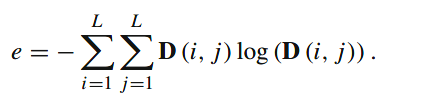
用中心矩和香农熵表示统计量,一共三个平面的统计量构成一个特征函数fx,fx表示表示绕x轴的第k次旋转的总统计数据。
点集分别绕X,Y,Z旋转一系列角度,会得到一系列的fx,fy,fz,总的特征描述子是关于三者的函数f

spinimage是通过使用圆柱形参数化将局部表面投影到二维平面上生成的。同样,通过从垂直于曲面的视点渲染局部曲面来获取snapshot。我们的ROPS在几个方面与这些方法不同。首先,ROPS表示一组视点的局部曲面,而不是一个视图(如自si和ss)。第二,ROPS与一个唯一且无歧义的的LRF相关联,并且它对旋转是不变的。相比之下,si丢弃圆柱形角度信息,ss容易旋转。第三,ROPS比si和ss更紧凑,因为ROPS用一组统计信息进一步编码二维矩阵。ROPS、si和ss的典型长度分别为135、225和1600。
PS:rops四个参数,联合统计量、bins的数量L、绕轴旋转的次数T、支持半径r。
end.















 282
282











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









