







卷积神经网络,也叫 convnet,它是计算机视觉应用几乎都在使用的一种深度学习模型。
实例化一个小型的卷积神经网络
from keras import layers
from keras import models
model = models.Sequential()
model.add(layers.Conv2D(32, (3, 3), activation='relu', input_shape=(28, 28, 1)))
model.add(layers.MaxPooling2D((2, 2)))
model.add(layers.Conv2D(64, (3, 3), activation='relu'))
model.add(layers.MaxPooling2D((2, 2)))
model.add(layers.Conv2D(64, (3, 3), activation='relu'))
卷积神经网络接收形状为 (image_height, image_width, image_channels)的输入张量(不包括批量维度)。
本例中设置卷积神经网络处理大小为 (28, 28, 1) 的输入张量,这正是 MNIST 图像的格式。
我们向第一层传入参数 input_shape=(28, 28, 1) 来完成此设置。
model.summary()
Layer (type) Output Shape Param #
=================================================================
conv2d_1 (Conv2D) (None, 26, 26, 32) 320
max_pooling2d_1 (MaxPooling2D) (None, 13, 13, 32) 0
conv2d_2 (Conv2D) (None, 11, 11, 64) 18496
max_pooling2d_2 (MaxPooling2D) (None, 5, 5, 64) 0
conv2d_3 (Conv2D) (None, 3, 3, 64) 36928
=================================================================
Total params: 55,744
Trainable params: 55,744
Non-trainable params: 0
每个 Conv2D 层和 MaxPooling2D 层的输出都是一个形状为 (height, width, channels) 的 3D 张量。宽度和高度两个维度的尺寸通常会随着网络加深而变小。通道数量由传入 Conv2D 层的第一个参数所控制(32 或 64)。
在卷积神经网络上添加分类器
将最后的输出张量[大小为 (3, 3, 64)]输入到一个密集连接分类器网络中,
即 Dense 层的堆叠,这些分类器可以处理 1D 向量,而当前的输出是 3D 张量。
首先,我们需要将 3D 输出展平为 1D,然后在上面添加几个 Dense 层。
model.add(layers.Flatten())
model.add(layers.Dense(64, activation='relu'))
model.add(layers.Dense(10, activation='softmax'))
model.summary()
Layer (type) Output Shape Param #
conv2d_1 (Conv2D) (None, 26, 26, 32) 320
max_pooling2d_1 (MaxPooling2D) (None, 13, 13, 32) 0
conv2d_2 (Conv2D) (None, 11, 11, 64) 18496
max_pooling2d_2 (MaxPooling2D) (None, 5, 5, 64) 0
conv2d_3 (Conv2D) (None, 3, 3, 64) 36928
flatten_1 (Flatten) (None, 576) 0
dense_1 (Dense) (None, 64) 36928
dense_2 (Dense) (None, 10) 650
Total params: 93,322
Trainable params: 93,322
Non-trainable params: 0
在进入两个 Dense 层之前,形状 (3, 3, 64) 的输出被展平为形状 (576,) 的向量。
在 MNIST 图像上训练卷积神经网络
from keras.datasets import mnist
from keras.utils import to_categorical
(train_images, train_labels), (test_images, test_labels) = mnist.load_data()
train_images = train_images.reshape((60000, 28, 28, 1))
train_images = train_images.astype('float32') / 255
test_images = test_images.reshape((10000, 28, 28, 1))
test_images = test_images.astype('float32') / 255
train_labels = to_categorical(train_labels)
test_labels = to_categorical(test_labels)
model.compile(optimizer='rmsprop',
loss='categorical_crossentropy',
metrics=['accuracy'])
model.fit(train_images, train_labels, epochs=5, batch_size=64)
我们在测试数据上对模型进行评估。
test_loss, test_acc = model.evaluate(test_images, test_labels)
test_acc
0.99080000000000001
卷积运算
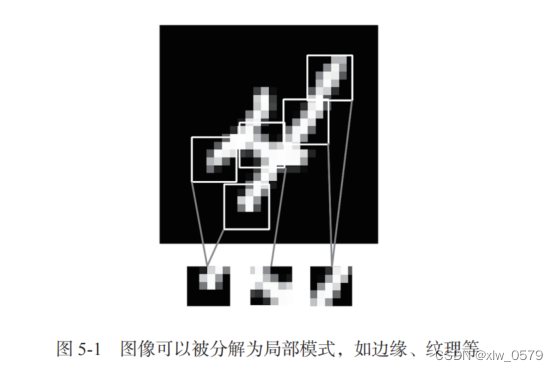
密集连接层和卷积层的根本区别在于,Dense 层从输入特征空间中学到的是全局模式,而卷积层学到的是局部模式。
卷积神经网络学到的模式具有平移不变性(translation invariant)。
卷积神经网络可以学到模式的空间层次结构(spatial hierarchies of patterns)
第一个卷积层将学习较小的局部模式(比如边缘),第二个卷积层将学习由第一层特征组成的更大的模式,以此类推。这使得卷积神经网络可以有效地学习越来越复杂、越来越抽象的视觉概念
卷积由以下两个关键参数所定义。
- 从输入中提取的图块尺寸:这些图块的大小通常是 3×3 或 5×5。本例中为 3×3,这是很常见的选择。
- 输出特征图的深度:卷积所计算的过滤器的数量。本例第一层的深度为 32,最后一层的深度是 64。
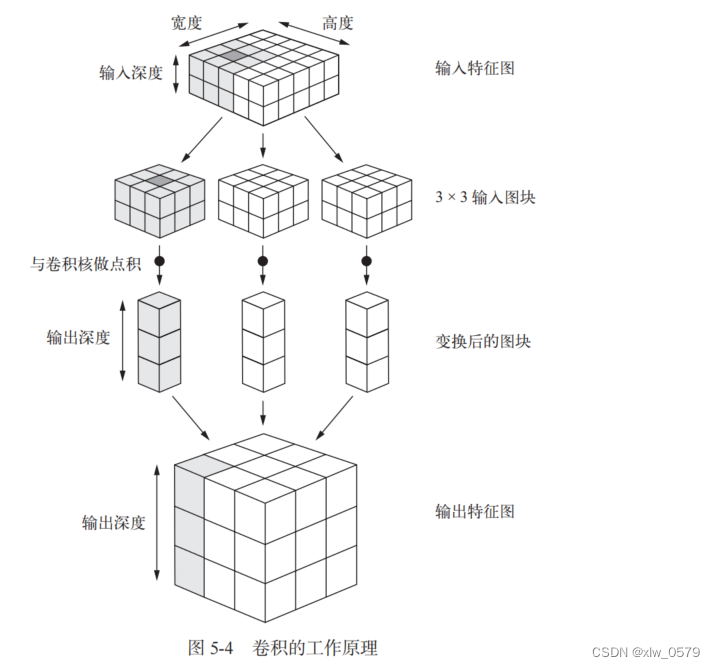
卷积的工作原理
在 3D 输入特征图上滑动(slide)这些 3×3 或 5×5 的窗口,在每个可能的位置停止并提取周围特征的 3D 图块[形状为 (window_height, window_width, input_depth)]。
然后每个 3D 图块与学到的同一个权重矩阵[叫作卷积核(convolution kernel)]做张量积,转换成形状为 (output_depth,) 的 1D 向量。然后对所有这些向量进行空间重组,使其转换为形状为 (height, width, output_depth) 的 3D 输出特征图。
输出特征图中的每个空间位置都对应于输入特征图中的相同位置(比如输出的右下角包含了输入右下角的信息)。
举个例子,利用 3×3 的窗口,向量 output[i, j, :] 来自 3D 图块 input[i-1:i+1, j-1:j+1, :]。
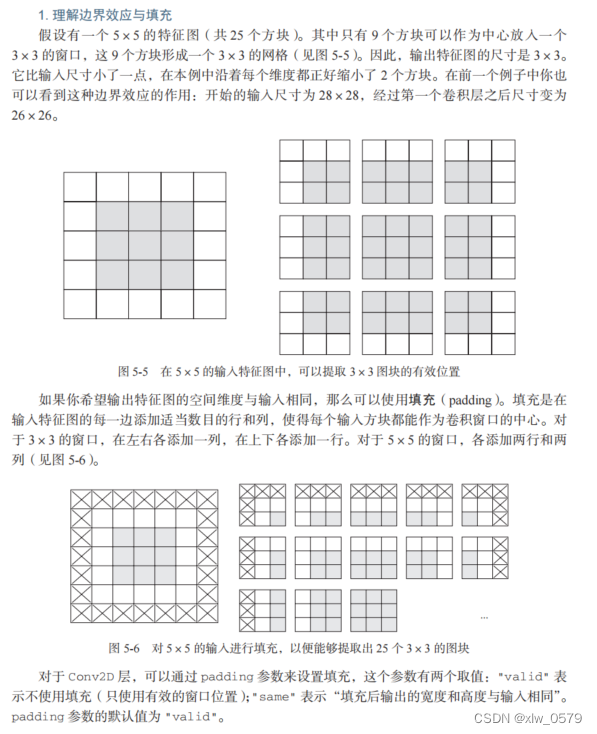
输出的宽度和高度可能与输入的宽度和高度不同。不同的原因可能有两点。
- 边界效应,可以通过对输入特征图进行填充来抵消。
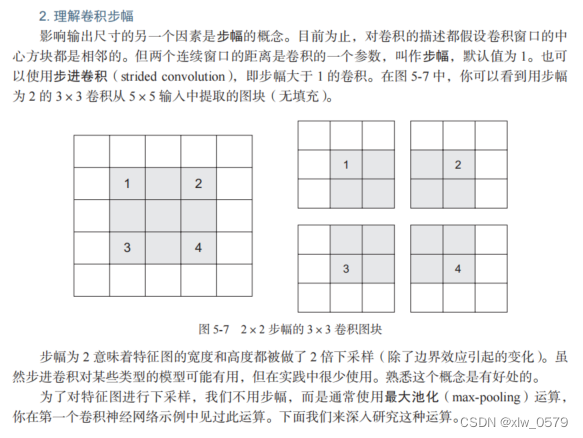
- 使用了步幅(stride),稍后会给出其定义。
最大池化运算
每个 MaxPooling2D 层之后,特征图的尺寸都会减半。例如,在第一个 MaxPooling2D 层之前,特征图的尺寸是 26×26,但最大池化运算将其减半为 13×13。这就是最大池化的作用:对特征图进行下采样,与步进卷积类似。
最大池化通常使用 2×2 的窗口和步幅 2,其目的是将特征图下采样 2 倍。
为什么要用这种方式对特征图下采样?为什么不删除最大池化层,一直保留较大的特征图?
model_no_max_pool = models.Sequential()
model_no_max_pool.add(layers.Conv2D(32, (3, 3), activation='relu',
input_shape=(28, 28, 1)))
model_no_max_pool.add(layers.Conv2D(64, (3, 3), activation='relu'))
model_no_max_pool.add(layers.Conv2D(64, (3, 3), activation='relu'))
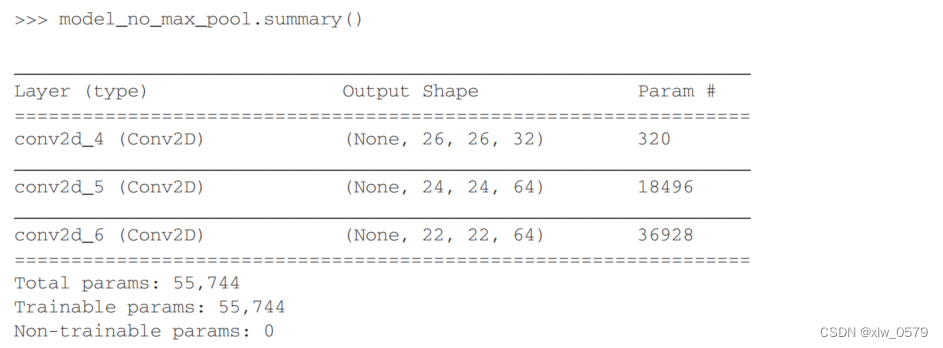
这种架构不利于学习特征的空间层级结构。第三层的 3×3 窗口中只包含初始输入的7×7 窗口中所包含的信息。(一个7×7等于3个3×3)
最后一层的特征图对每个样本共有 22×22×64=30 976 个元素。这太多了。如果你将其展平并在上面添加一个大小为 512 的 Dense 层,那一层将会有 1580 万个参数。这对于这样一个小模型来说太多了,会导致严重的过拟合。
最大池化不是实现这种下采样的唯一方法
还可以使用平均池化来代替最大池化,其方法是将每个局部输入图块变换为取该图块各通道的平均值,而不是最大值。但最大池化的效果往往比这些替代方法更好















 543
543











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









