







Dynamic Reconfig是ROS比较厉害的一个地方,可以在程序运行的时候动态调整参数,ROS官网关于Dynamic Reconfig的讲解主要有三处
1. http://wiki.ros.org/dynamic_reconfigure/Tutorials
2. http://wiki.ros.org/roscpp_tutorials/Tutorials 最下面
3. http://wiki.ros.org/ROSNodeTutorialC++ 最下面
个人感觉第一个好一点,另外两个比较杂乱。下面就介绍自己关于Dynamic Reconfig学习过程,这里假定大家都做完了,Beginner tutorials的学习,即写一个Publisher ,subscriber,自定义的service(两个数字的加法)以及Msg的学习。
主要参考:
http://wiki.ros.org/dynamic_reconfigure/Tutorials/SettingUpDynamicReconfigureForANode
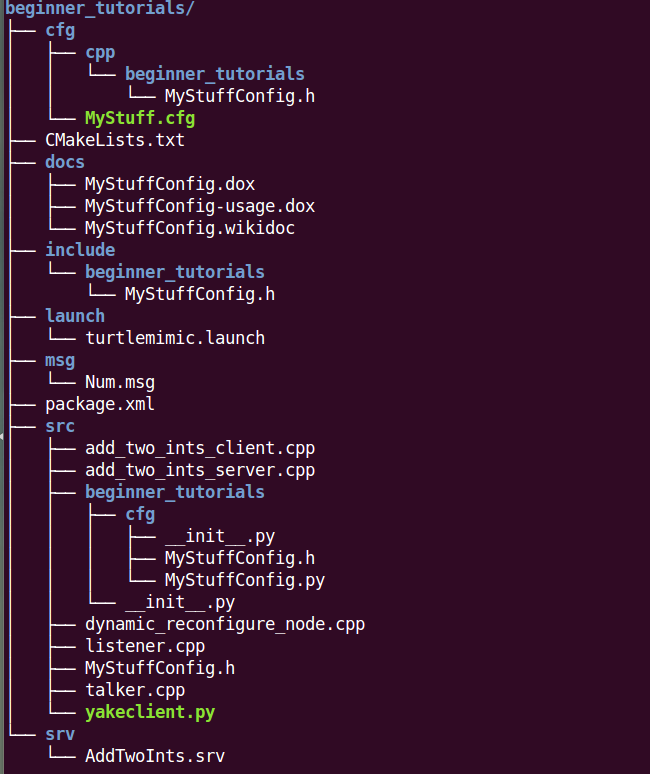
我的最终的文件目录如图
1.定义cfg文件
首先在catkin_ws/src/beginner_tutorials目录下建立一个名为cfg的文件夹,放入一个名为MyStuff.cfg的文件,这个文件的作用就是告诉ROS 到时侯我们需要动态调整的参数有哪些。
#! /usr/bin/env python
# Forearm camera configuration
PACKAGE='beginner_tutorials'
import roslib
roslib.load_manifest(PACKAGE)
from math import pi
from driver_base.msg import SensorLevels
from dynamic_reconfigure.parameter_generator import *
gen = ParameterGenerator()
angles = gen.add_group("Angles")
# Name Type Reconfiguration level
# Description
# Default Min Max
angles.add("min_ang", double_t, SensorLevels.RECONFIGURE_STOP,
"The angle of the first range measurement. The unit depends on ~ang_radians.",
-pi/2,-pi, pi)
angles.add("max_ang", double_t, SensorLevels.RECONFIGURE_STOP,
"The angle of the first range measurement. The unit depends on ~ang_radians.",
pi/2, -pi, pi)
gen.add("intensity", bool_t, SensorLevels.RECONFIGURE_STOP,
"Whether or not the hokuyo returns intensity values.",
False)
gen.add("cluster", int_t, SensorLevels.RECONFIGURE_STOP,
"The number of adjacent range measurements to cluster into a single reading",
1, 0, 99)
gen.add("skip", int_t, SensorLevels.RECONFIGURE_STOP,
"The number of scans to skip between each measured scan",
0, 0, 9)
gen.add("port", str_t, SensorLevels.RECONFIGURE_CLOSE,
"The serial port where the hokuyo device can be found",
"/dev/ttyACM0")
gen.add("calibrate_time", bool_t, SensorLevels.RECONFIGURE_CLOSE,
"Whether the node should calibrate the hokuyo's time offset",
True)
gen.add("frame_id", str_t, SensorLevels.RECONFIGURE_RUNNING,
"The frame in which laser scans will be returned",
"laser")
gen.add("time_offset", double_t, SensorLevels.RECONFIGURE_RUNNING,
"An offet to add to the timestamp before publication of a scan",
0, -0.25, 0.25)
gen.add("allow_unsafe_settings",bool_t, SensorLevels.RECONFIGURE_CLOSE,
"Turn this on if you wish to use the UTM-30LX with an unsafe angular range. Turning this option on may cause occasional crashes or bad data. This option is a tempory workaround that will hopefully be removed in an upcoming driver version.",
False)
exit(gen.generate(PACKAGE, "dynamic_reconfigure_node", "MyStuff"))这里尤其要注意最后一句的第三个参数,必须与config文件同名,我们的config文件名为MyStuff.cfg所以这里为Mytuff。而且第三个参数也决定着我们的config头文件的名称,后面埋个伏笔,头文件生成的名称为MyStuffConfig.h也即,第三个参数加上Config.h.
修改cfg文件的权限
chmod a+x MyStuff.cfg
2.修改依赖项
在manifest.xml文件中加入依赖项即:
<build_depend>dynamic_reconfigure</build_depend>
<build_depend>driver_base</build_depend>
<run_depend>dynamic_reconfigure</run_depend>
<run_depend>driver_base</run_depend>
3.创建server主函数
在src文件夹下建立一个名为dynamic_reconfigure_node.cpp的文件,代码如下,尤其注意这里的第二个头文件的包含,因为我发现编译的时候,生成的config的头文件编译时放在了cfg文件夹下的cpp文件夹中,这个是catkin_make(catkin_make __force-cmake)的时候创建的,但是按照官网的路径它查找不到,我们干脆拷贝到src文件夹下
#include <dynamic_reconfigure/server.h>
#include "MyStuffConfig.h"
#include <ros/ros.h>
void callback(beginner_tutorials::MyStuffConfig &config, uint32_t level)
{
ROS_INFO("Reconfigure request : %f %f %i %i %i %s %i %s %f %i",
config.groups.angles.min_ang,
config.groups.angles.max_ang,
(int)config.intensity,
config.cluster,
config.skip,
config.port.c_str(),
(int)config.calibrate_time,
config.frame_id.c_str(),
config.time_offset,
(int)config.allow_unsafe_settings);
// do nothing for now
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "dynamic_reconfigure_node");
dynamic_reconfigure::Server<beginner_tutorials::MyStuffConfig> srv;
dynamic_reconfigure::Server<beginner_tutorials::MyStuffConfig>::CallbackType f;
f = boost::bind(&callback, _1, _2);
srv.setCallback(f);
ROS_INFO("Starting to spin...");
ros::spin();
return 0;
}4.关于CMakeList.txt的修改
这个文件相信大家不陌生,但是也是最头疼的地方,编译的错误好多都是设置不当引起的。我直接贴上来
cmake_minimum_required(VERSION 2.8.3)
project(beginner_tutorials)
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
message_generation
dynamic_reconfigure
)
################################################
## Declare ROS messages, services and actions ##
################################################
## To declare and build messages, services or actions from within this
## package, follow these steps:
## * Let MSG_DEP_SET be the set of packages whose message types you use in
## your messages/services/actions (e.g. std_msgs, actionlib_msgs, ...).
## * In the file package.xml:
## * add a build_depend and a run_depend tag for each package in MSG_DEP_SET
## * If MSG_DEP_SET isn't empty the following dependencies might have been
## pulled in transitively but can be declared for certainty nonetheless:
## * add a build_depend tag for "message_generation"
## * add a run_depend tag for "message_runtime"
## * In this file (CMakeLists.txt):
## * add "message_generation" and every package in MSG_DEP_SET to
## find_package(catkin REQUIRED COMPONENTS ...)
## * add "message_runtime" and every package in MSG_DEP_SET to
## catkin_package(CATKIN_DEPENDS ...)
## * uncomment the add_*_files sections below as needed
## and list every .msg/.srv/.action file to be processed
## * uncomment the generate_messages entry below
## * add every package in MSG_DEP_SET to generate_messages(DEPENDENCIES ...)
## Generate messages in the 'msg' folder
add_message_files(
FILES
Num.msg
)
## Generate services in the 'srv' folder
add_service_files(
FILES
AddTwoInts.srv
)
## Generate actions in the 'action' folder
# add_action_files(
# FILES
# Action1.action
# Action2.action
# )
## Generate added messages and services with any dependencies listed here
generate_messages(
DEPENDENCIES
std_msgs
)
# for dynamic reconfigure
generate_dynamic_reconfigure_options(
cfg/MyStuff.cfg
)
###################################
## catkin specific configuration ##
###################################
## The catkin_package macro generates cmake config files for your package
## Declare things to be passed to dependent projects
## INCLUDE_DIRS: uncomment this if you package contains header files
## LIBRARIES: libraries you create in this project that dependent projects also need
## CATKIN_DEPENDS: catkin_packages dependent projects also need
## DEPENDS: system dependencies of this project that dependent projects also need
catkin_package( CATKIN_DEPENDS message_runtime)
###########
## Build ##
###########
## Specify additional locations of header files
## Your package locations should be listed before other locations
include_directories(${dynamic_reconfigure_PACKAGE_PATH}/cmake/cfgbuild.cmake)
include_directories(${catkin_INCLUDE_DIRS})
## Declare a cpp library
# add_library(beginner_tutorials
# src/${PROJECT_NAME}/beginner_tutorials.cpp
# )
## Declare a cpp executable
# add_executable(beginner_tutorials_node src/beginner_tutorials_node.cpp)
add_executable(talker src/talker.cpp)
add_executable(listener src/listener.cpp)
# for dynamic reconfigure
add_executable(dynamic_reconfigure_node src/dynamic_reconfigure_node.cpp)
add_executable(add_two_ints_server src/add_two_ints_server.cpp)
add_executable(add_two_ints_client src/add_two_ints_client.cpp)
## Add cmake target dependencies of the executable/library
## as an example, message headers may need to be generated before nodes
# add_dependencies(beginner_tutorials_node beginner_tutorials_generate_messages_cpp)
# for dynamic reconfigure
add_dependencies(dynamic_reconfigure_node beginner_tutorials_gencfg)
# for python dynamic client
add_dependencies(dynamic_reconfigure_node beginner_tutorials_generate_messages_cpp)
add_dependencies(talker beginner_tutorials_generate_messages_cpp)
add_dependencies(listener beginner_tutorials_generate_messages_cpp)
add_dependencies(add_two_ints_server beginner_tutorials_gencpp)
add_dependencies(add_two_ints_client beginner_tutorials_gencpp)
## Specify libraries to link a library or executable target against
# target_link_libraries(beginner_tutorials_node ${catkin_LIBRARIES} )
# for dynamic reconfigure
target_link_libraries(dynamic_reconfigure_node ${catkin_LIBRARIES})
target_link_libraries(talker ${catkin_LIBRARIES})
target_link_libraries(listener ${catkin_LIBRARIES})
target_link_libraries(add_two_ints_server ${catkin_LIBRARIES})
target_link_libraries(add_two_ints_client ${catkin_LIBRARIES})
#############
## Install ##
#############
# all install targets should use catkin DESTINATION variables
# See http://ros.org/doc/api/catkin/html/adv_user_guide/variables.html
## Mark executable scripts (Python etc.) for installation
## in contrast to setup.py, you can choose the destination
# install(PROGRAMS
# scripts/my_python_script
# DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
# )
## Mark executables and/or libraries for installation
# install(TARGETS beginner_tutorials beginner_tutorials_node
# ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
# )
## Mark cpp header files for installation
# install(DIRECTORY include/${PROJECT_NAME}/
# DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION}
# FILES_MATCHING PATTERN "*.h"
# PATTERN ".svn" EXCLUDE
# )
## Mark other files for installation (e.g. launch and bag files, etc.)
# install(FILES
# # myfile1
# # myfile2
# DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
# )
#############
## Testing ##
#############
## Add gtest based cpp test target and link libraries
# catkin_add_gtest(${PROJECT_NAME}-test test/test_beginner_tutorials.cpp)
# if(TARGET ${PROJECT_NAME}-test)
# target_link_libraries(${PROJECT_NAME}-test ${PROJECT_NAME})
# endif()
## Add folders to be run by python nosetests
# catkin_add_nosetests(test)
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
message_generation
dynamic_reconfigure
)
generate_dynamic_reconfigure_options(
cfg/MyStuff.cfg
)
include_directories(${dynamic_reconfigure_PACKAGE_PATH}/cmake/cfgbuild.cmake)
add_executable(dynamic_reconfigure_node src/dynamic_reconfigure_node.cpp)这里生成可执行的node文件,node名字是dynamic_reconfigure_node
add_dependencies(dynamic_reconfigure_node beginner_tutorials_gencfg)也有写成${PROJECT_NAME}_gencfg的
target_link_libraries(dynamic_reconfigure_node ${catkin_LIBRARIES})生成可执行的node文件,node名字是dynamic_reconfigure_node
5.测试用的程序
测试用到的程序,其实我在这里仿照了http://wiki.ros.org/dynamic_reconfigure/Tutorials/中的client.py的写法,但是它的有个缺点,按照ros.rate(0.1)即0.1Hz也即10s一次,他会复位,就是你调整的参数10s后就由默认值替代了,我这里修改了一下,让他不会复位
在src中放入一个名为yakeclient.py的文件,这里就是客户端了
#!/usr/bin/env python
PACKAGE = 'beginner_tutorials'
import roslib;roslib.load_manifest(PACKAGE)
import rospy
import dynamic_reconfigure.client
def callback(config):
rospy.loginfo("Config set to {min_ang}, {max_ang}, {intensity}, {cluster}, {skip}, {port}, {calibrate_time}, {frame_id}, {time_offset},{allow_unsafe_settings}".format(**config))
if __name__ == "__main__":
rospy.init_node("yakeclient")
# Client first argument is the node names
client = dynamic_reconfigure.client.Client("dynamic_reconfigure_node", timeout=30, config_callback=callback)
r = rospy.Rate(0.1)
#x = 0
#b = False
while not rospy.is_shutdown():
#x = x+1
#if x>10:
# x=0
#b = not b
# client.update_configuration({"int_param":x, "double_param":(1/(x+1)), "str_param":str(rospy.get_rostime()), "bool_param":b, "size":1})
r.sleep()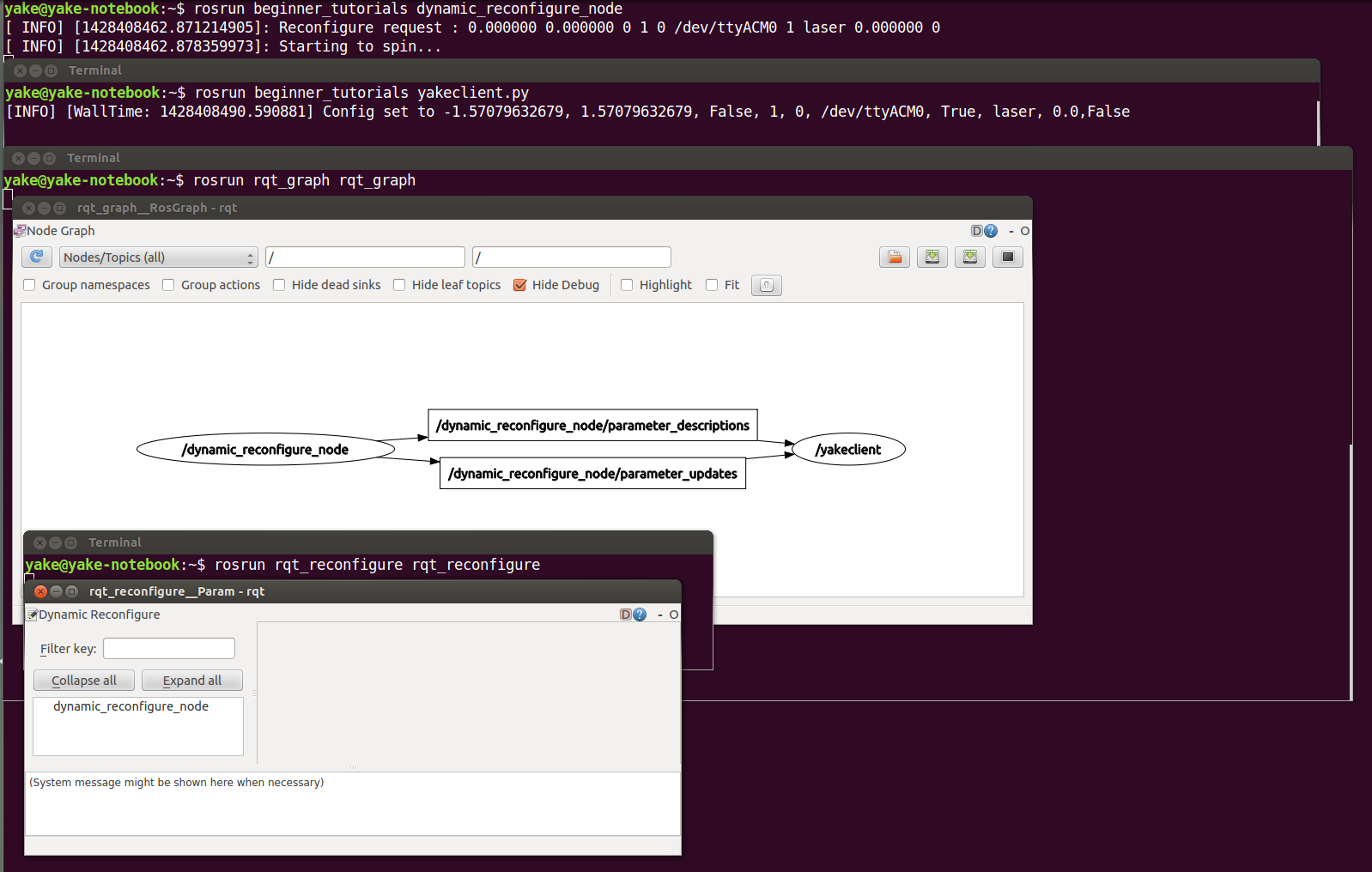
7.对比官方教程
这里我们可以看到其实结构都是一样的,最主要的区别还是在于config文件的定义,而他是完全自由的,完全由设计者考虑,需要动态调整一些什么样子的参数。
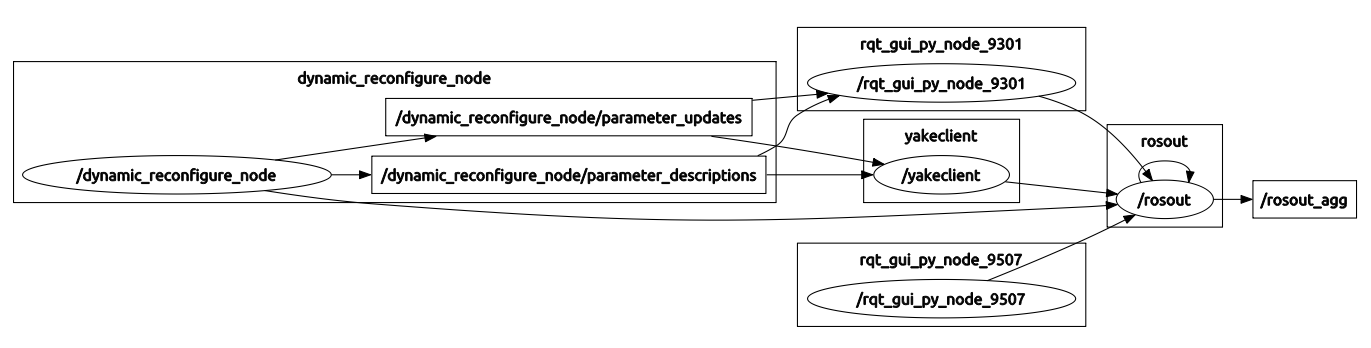
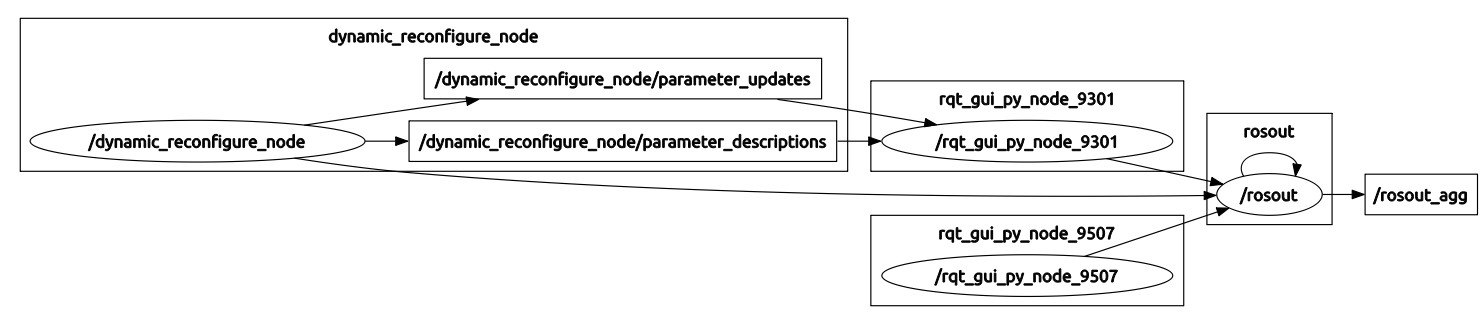
从下面的这个详细的节点关系图,我们可以看出,其实rqt_reconfig也即图中的rqt_gui_py_node_9301,就是一个client。那个9507是rqt_graph
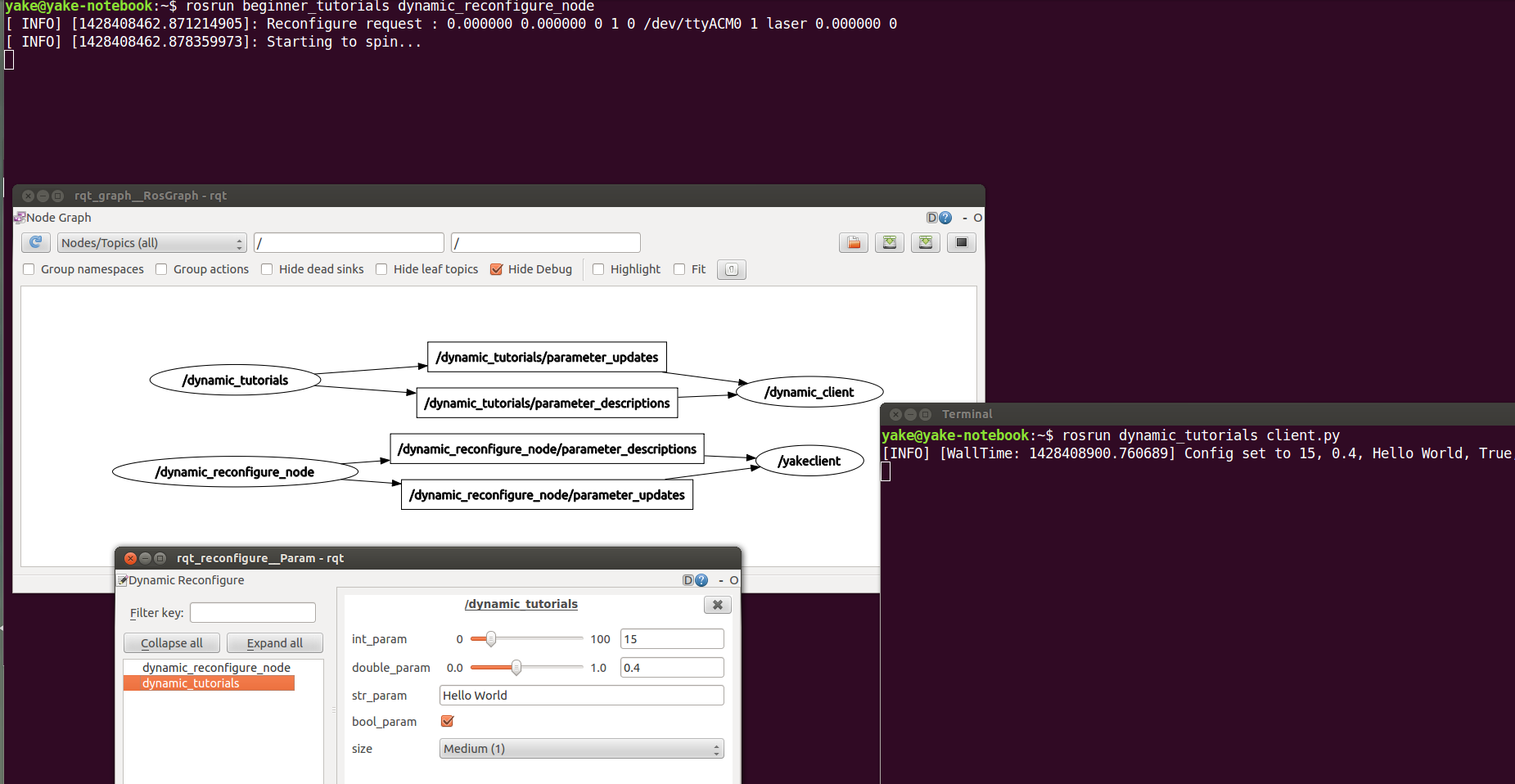
关掉我们自己的yakeclient如图所示。因此自己的那个client目前只有显示的作用,(即只能看到设定的值)。而rqt_reconfig则包含了设置与显示。所以一般情况下,我们所要做的就是写dynamic server,利用rqt_reconfig作为client来设定目标值。
8.总结
这些内容写起来容易,但是自己花了差不多两天才解决掉,其中主要卡在了cfg.h上,因为系统编译老是提示找不到它,如果你也有这样的问题,首先看看CMakeList.txt内容是否正确,二,就像我之前那样,生成的头文件居然放在cfg文件夹里了。还有就是Client.py文件的写法。我当时起得名字叫yakeclient.py,观察rqt_graph时的节点信息老是订阅不了topic
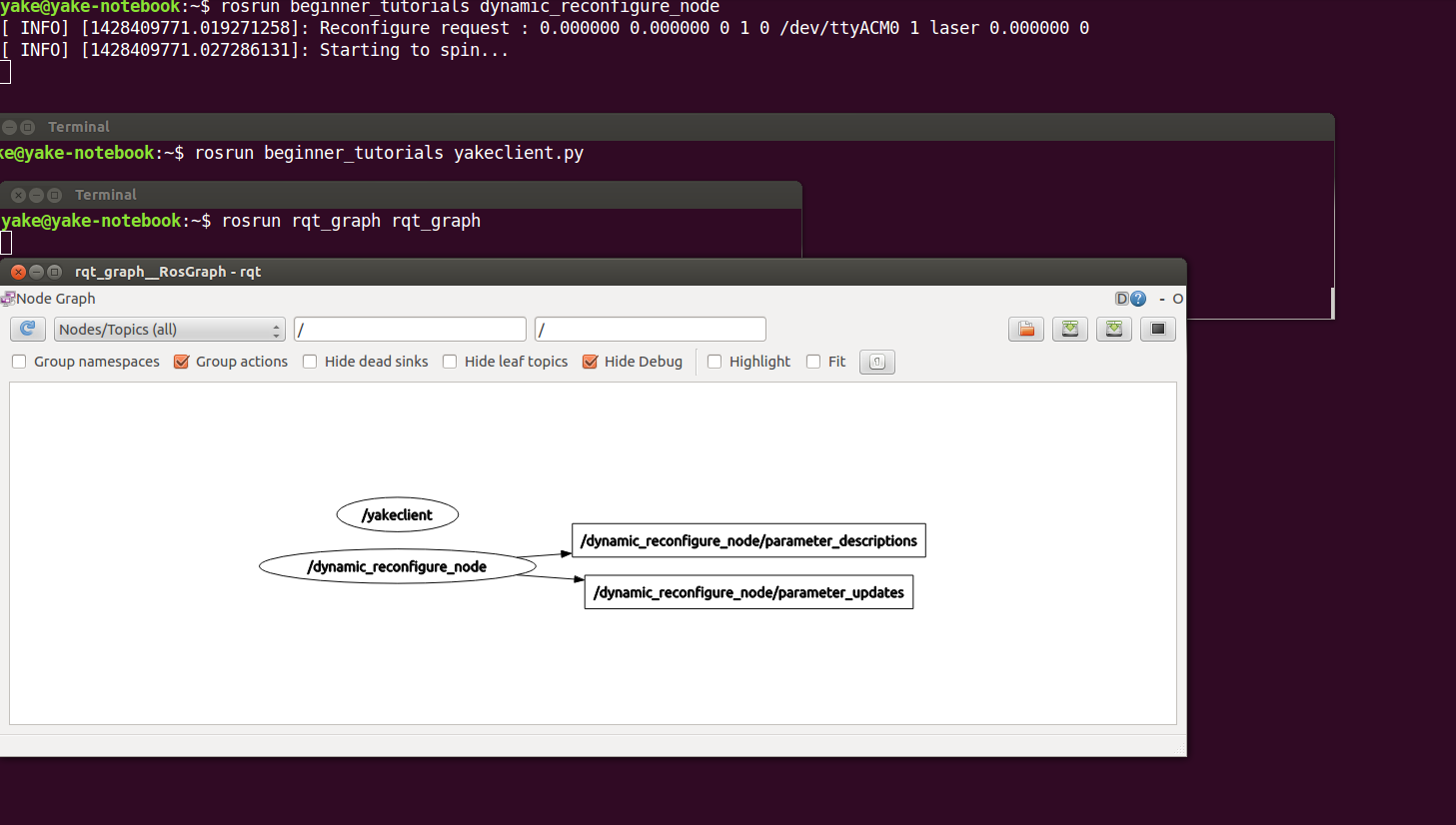
像上图中的一样,然后仔细查看才发现python中的文件第17行

这里我想当然理解为了package name其实它应该是publisher 的名称,也就是server的名称,这里我们的server节点是dynamic_reconfigure_node所以改完以后就Ok了。引以为戒。
















 2251
2251

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











