







1.驱动安装
sudo apt-get update
sudo apt-add-repository multiverse
sudo apt-get update
sudo apt-get install nvidia-driver-460
显示显卡内容相关界面
nvidia-smi
2.安装docker
sudo apt install docker.io
验证版本
docker –version
运行docker看是否正常
docker run hello-world
如果不能正常运行,添加用户组
sudo groupadd docker
sudo usermod -aG docker $USER
newgrp docker
3.安装NVIDIA Container Toolkit
distribution=$(. /etc/os-release;echo $ID$VERSION_ID)
curl -s -L https://nvidia.github.io/nvidia-docker/gpgkey | sudo apt-key add -
curl -s -L https://nvidia.github.io/nvidia-docker/$distribution/nvidia-docker.list
sudo apt-get -y update
sudo apt-get install -y nvidia-docker2
如果报错E: Unable to locate package nvidia-docker2
https://www.cnblogs.com/l-hh/p/13451639.html
如果显示这个,就按要求操作
Command 'curl' not found, but can be installed with:
sudo snap install curl # version 7.81.0, or
sudo apt install curl # version 7.68.0-1ubuntu2.8
See 'snap info curl' for additional versions.
gpg: no valid OpenPGP data found.
完成后重新启动docker
sudo systemctl restart docker
4.安装apollo
git clone GitHub - ApolloAuto/apollo: An open autonomous driving platform
如果报错报错GnuTLS recv error (-54): Error in the pull function,原因:网络问题
采用gitee安装
https://gitee.com/ApolloAuto/apollo/blob/master/docs/howto/how_to_clone_apollo_repo_from_china.md
或使用下载好的压缩包
5.启动docker容器
进入apollo文件夹
sudo bash docker/scripts/dev_start.sh
进入docker
bash docker/scripts/dev_into.sh
报错container is not running
原因:加了sudo去dev_start.sh启动了不同的容器,解决办法:关闭容器,不加sudo去start
6.编译apollo
./apollo.sh clean
./apollo.sh build_opt_gpu
如果报错ERROR: An error occurred during the fetch of repository 'zlib'
打开vscode修改.cache/bazel/540135163923dd7d5820f3ee4b306b32/external/rules_proto/proto/private里的dependencies.bzl
将zlib的部分改为
"zlib": {
"sha256": "629380c90a77b964d896ed37163f5c3a34f6e6d897311f1df2a7016355c45eff",
"build_file": "@com_google_protobuf//:third_party/zlib.BUILD",
"strip_prefix": "zlib-1.2.11",
"urls": [
"https://github.com/madler/zlib/archive/v1.2.11.tar.gz",
],
}
7.LGSVL安装编译
下载打开simulator
点击clusters,点击右上角add new创建新的cluster
点击simulation,点击右上角add new新建
在test case中vehicle选择apollo6.0
8.与apollo联合仿真
进如apollodocker容器
/scripts/bootstrap.sh启动dreamviewer
浏览器打开http://localhost:8888/
连接apollo和lgsvl
bash ./scripts/bootstrap_lgsvl.sh
bash ./scripts/bridge.sh
两者启动连接成功后,也可能通过本地LGSVL模拟器查验,点击左下方Bridge按钮,查看Bridge Status,显示为Connected则连接成功
连接成功后,打开apollo的Dreamview界面,最上面一栏选择LGSVL中对应的模式、车辆、地图。在下方的Dump Message中选择Sim Control选项
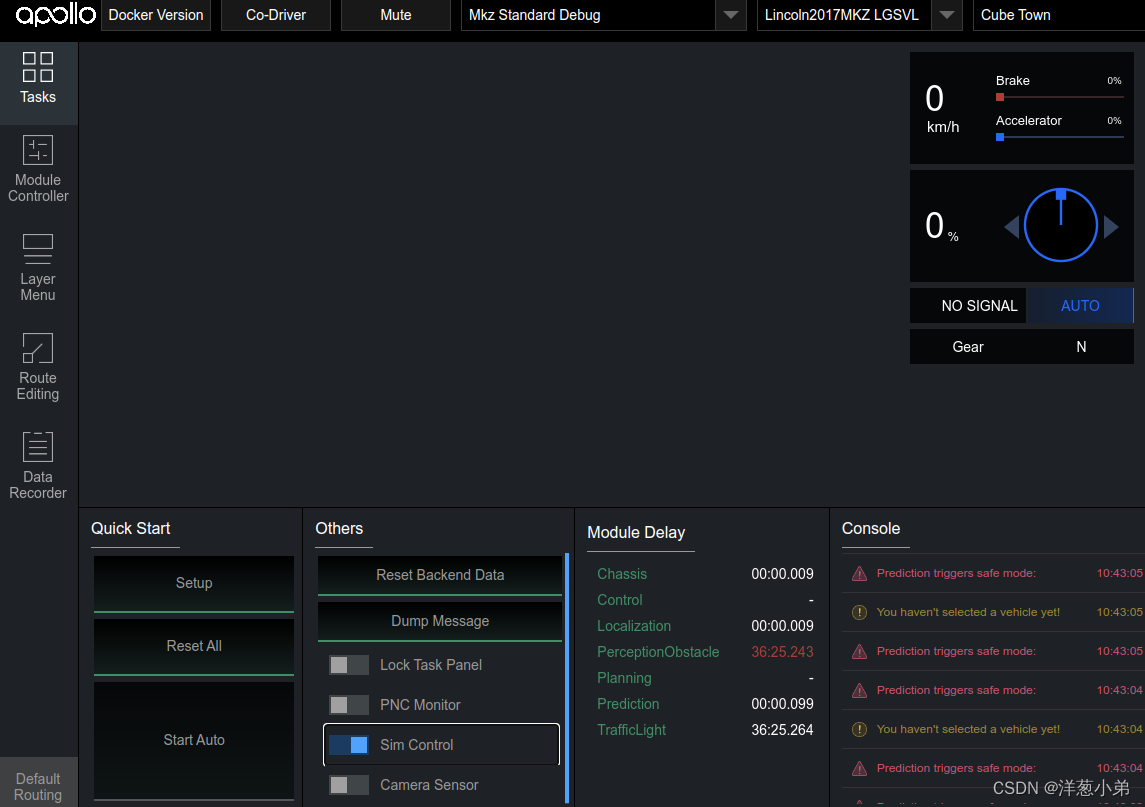
在左边route editing中能规划移动的目标点,点击地图选择好后点击sendSend Routing Request















 859
859











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









