






在探索树莓派的奇妙世界时,你是否也曾因缺乏网线和显示屏而陷入困境?我曾为此苦恼一周,如今终于攻克难关。这篇博客将为你带来超详细、零基础的树莓派安装Ubuntu系统18.04桌面版及ROS1的教程。从前期准备到具体操作,每一步都清晰呈现,助你轻松上手,避开那些令人头疼的弯路,开启树莓派的精彩之旅!
史上最最最详细的树莓派4B安装ubuntu系统18.04桌面版以及ROS1教程目录
1.准备工作
一块树莓派4B(包括电源线、散热片、风扇等)
树莓派4B是64位系统,我所使用的是树莓派4B,因此这里我选择安装Ubuntu18.04。
一个USB读卡器
读取SD卡数据,下载和格式化SD卡数据。
一张64GB内存卡
用于烧录ubuntu镜像.img,内存尽量选用>=64GB,方便ROS的安装以及后续开发。
特别注意的是:虚拟机下载的是后缀为.iso的镜像,树莓派烧录的是.img的镜像。两者是有差别的,后续大家下载的时候务必看清后缀
2.Ubuntu18.04镜像的下载和烧录
镜像的下载链接(清华大学开源镜像网站):
Index of /ubuntu-cdimage/ubuntu/releases/18.04/release/ | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror
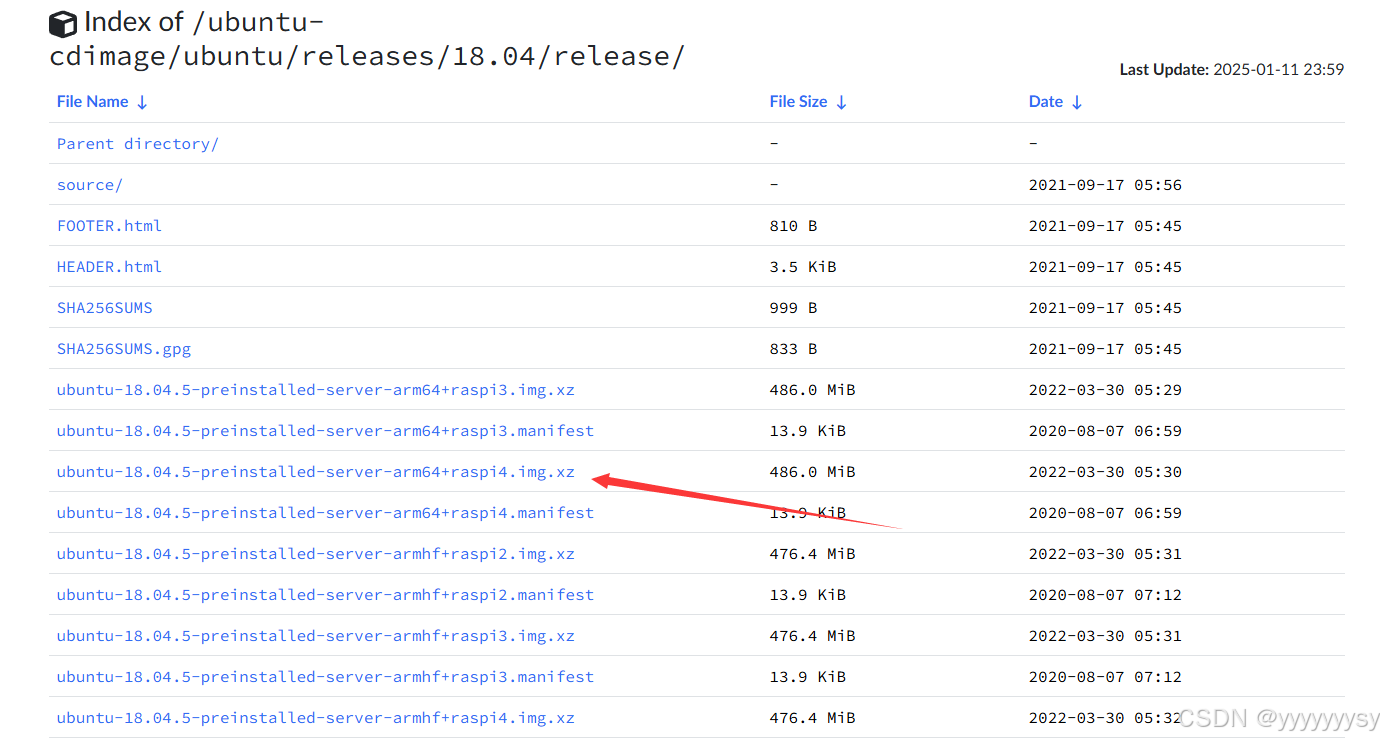
点击图中箭头所示文件进行下载

下载成功后,它还并不是一个.img文件,需要将其进行解压缩。下面那个文件夹就是解压缩后的文件。
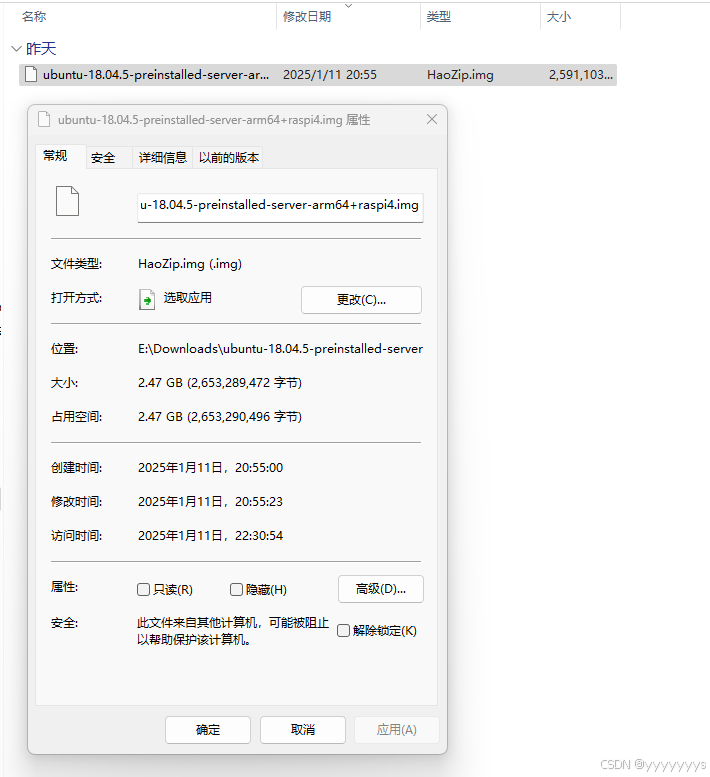
打开文件夹,里面就有成功下载的镜像.img文件。接下来我们进行烧录。
树莓派读卡器软件下载链接(树莓派官网):
Raspberry Pi OS – Raspberry Pi

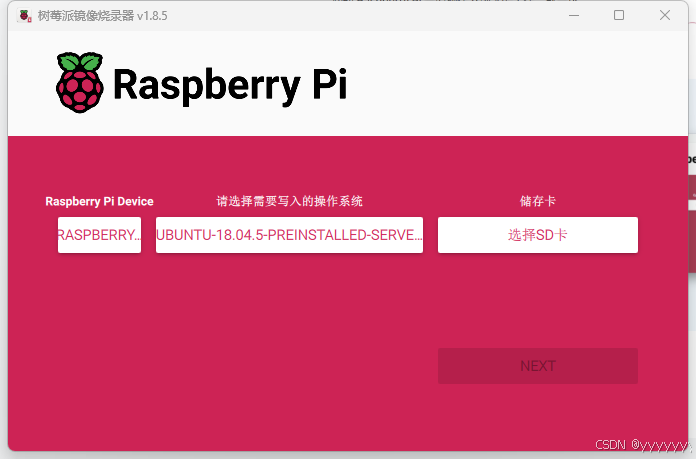
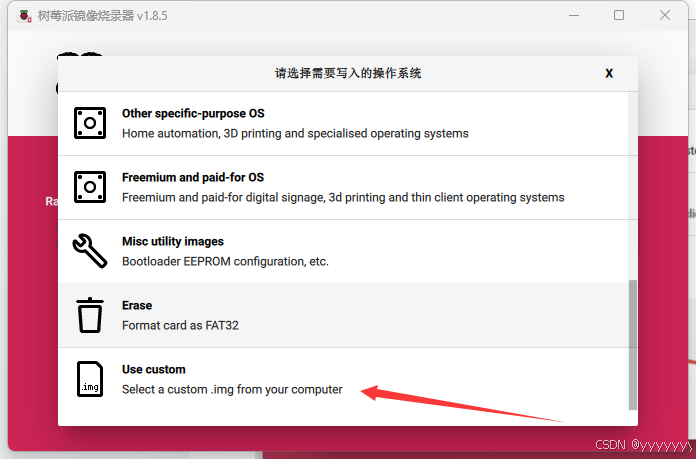
当我们下载安装好了烧录软件之后,我们把TF内存卡通过读卡器插入电脑。依次点击选择树莓派类型,这里我们选择树莓派4,选择操作系统,选择SD卡
如果此时SD卡里还有其他数据,我们先要将其擦除,再进行下载。
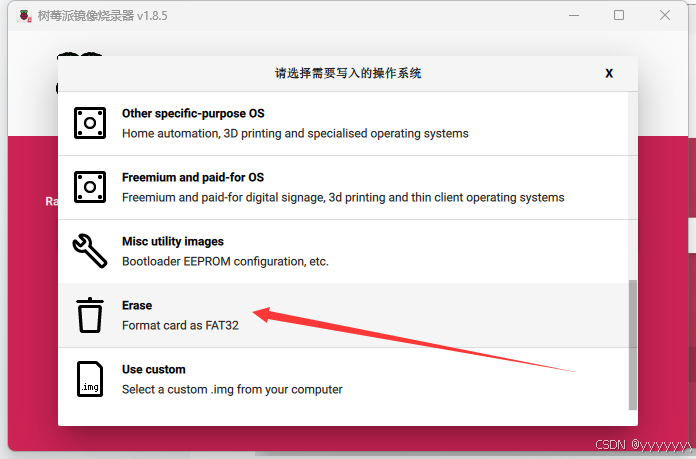
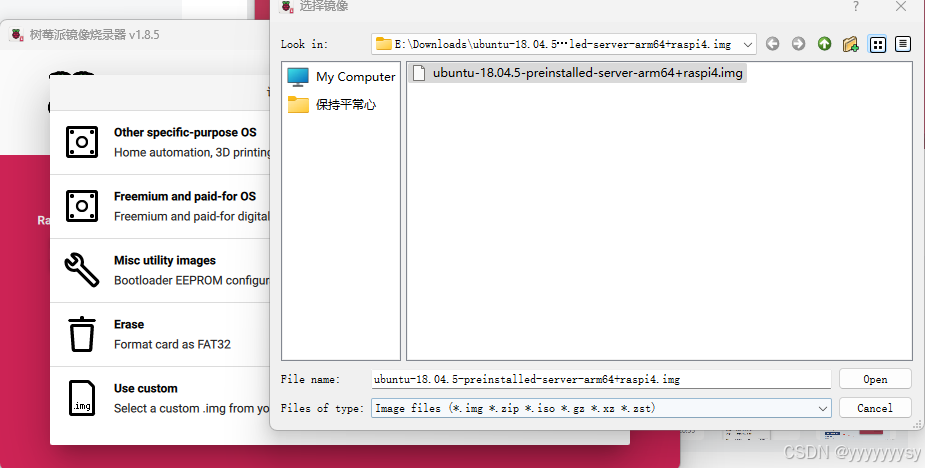
格式化成功后,我们选择本地文件,将刚刚下载的镜像烧录至SD卡中
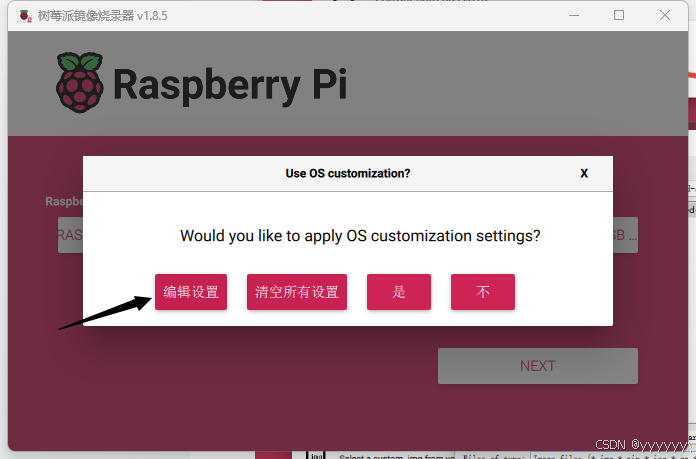
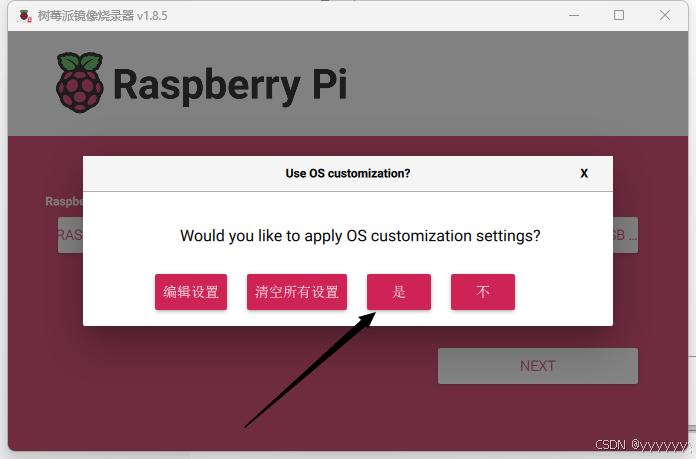
接下来对操作系统编辑设置
在这里面修改你的信息,更改ubuntu用户名密码以及ubuntu系统所要连接的wifi名和密码(一定要和你电脑开的热点名和密码一致后续才能连接上)

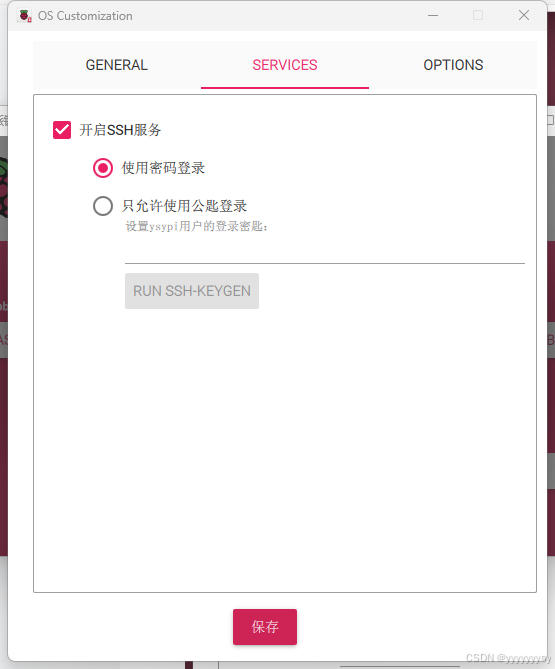
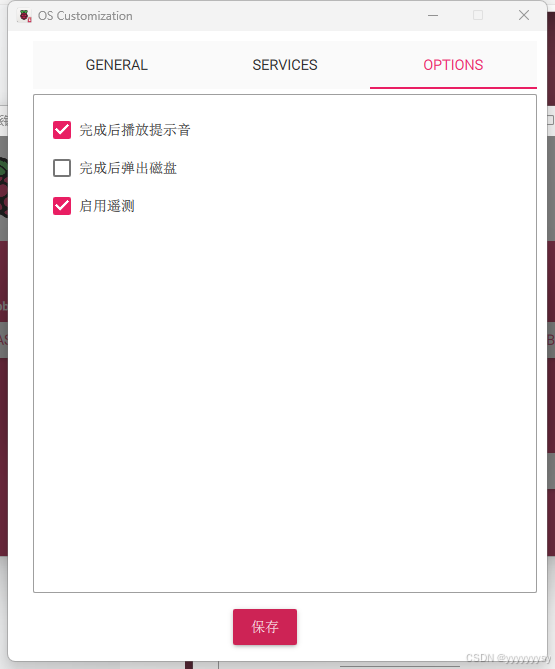
完成这些设置后点击保存,再点击是,即可将镜像下载至SD卡中,等待镜像下载完成。
ok至此你已经完成了镜像的下载,这一步是最轻松的!相信自己!
烧录后的工作
打开SD卡所在的盘(以我这里的F盘为例)找到network-config这个文件,以记事本的编辑方式打开。
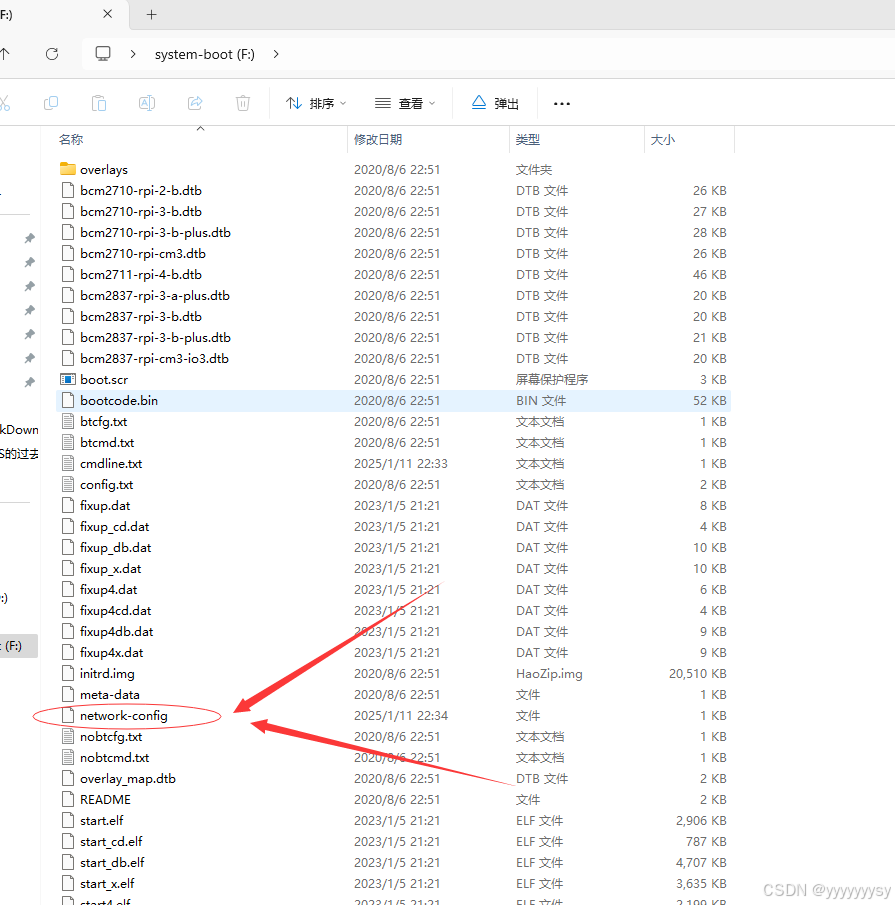
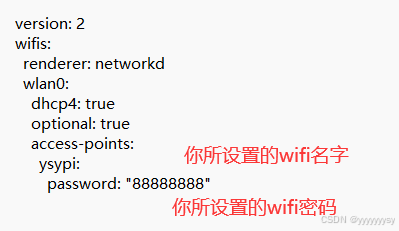
因为烧录软件的存在bug的原因,烧录后的网络配置的密码会变成其他编码格式,我们要对文件进行一定的修改。将最后两行分别改成刚刚设置的内容(注意格式!!包括空行什么的!)
非常重要的一点(如果没有完成后续网络连接可能会出问题):
- 如果你的WiFi名称没有空格的话,就要把WiFi名称左右两个双引号删掉
- 如果你的WiFi名称有空格或者特殊字符如(“-”)的话,就要把两个引号加上
接着需要的工作,打开我提供的链接下载新的启动文件
链接: https://pan.baidu.com/s/16HqTp-e7pxwOCXpS-BFULA?pwd=uwq4
提取码: uwq4
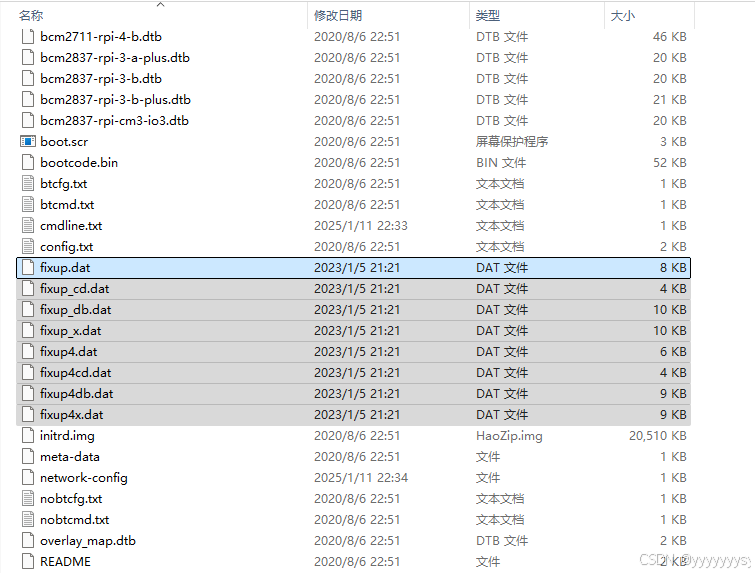
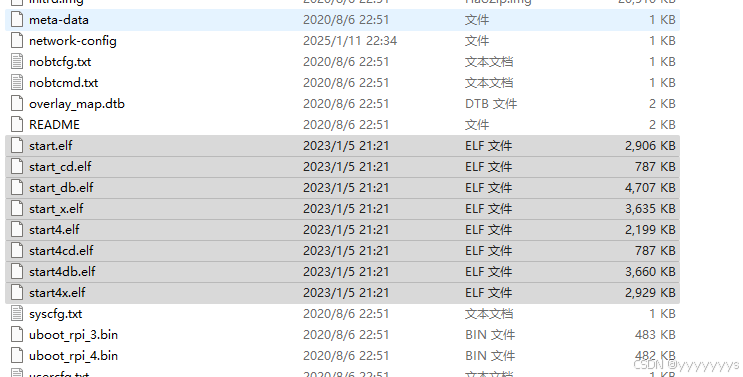
把下图 .dat和 .elf 共16个文件复制替换掉TF卡上面的文件即可。
到此整个树莓派镜像的操作已经结束,怎么样也不是很复杂吧!
3.启动登录树莓派,重启直到连上wifi
配置热点
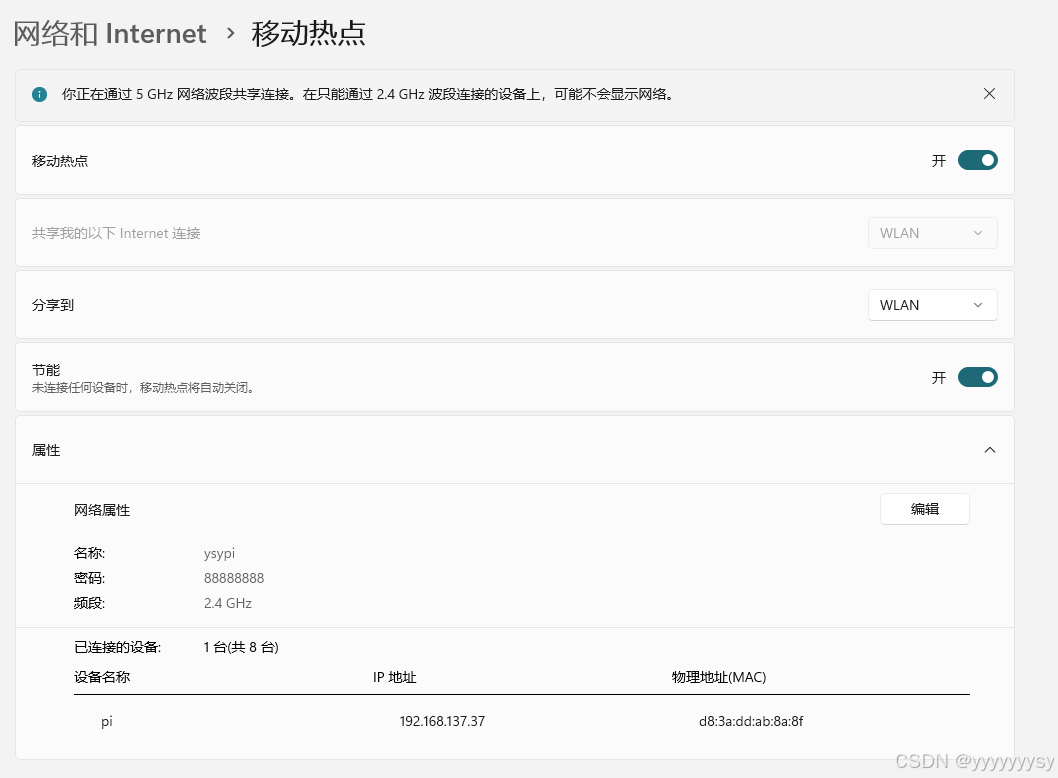
首先打开网络和Internet中的移动热点,设置电脑热点名为刚刚设置的名称(我这里为ysypi)名称和密码必须和刚刚设置一致!!!!名称和密码必须和刚刚设置一致!!!!名称和密码必须和刚刚设置一致!!!!重要的事情说三遍!
第一次启动后,键入用户名(在烧录软件中设置的,我这里的是ysypi),输入密码。前几次启动网络连接是不正常的,很大可能ping不通网址,我重启了两三次,电脑才能看见我树莓派的ip地址(方便我们后面ssh远程登录使用)
当然会有不少小伙伴仍然连不上wifi。嘿嘿这里我也是踩过了无数个坑才发现的问题!
连不上网络?
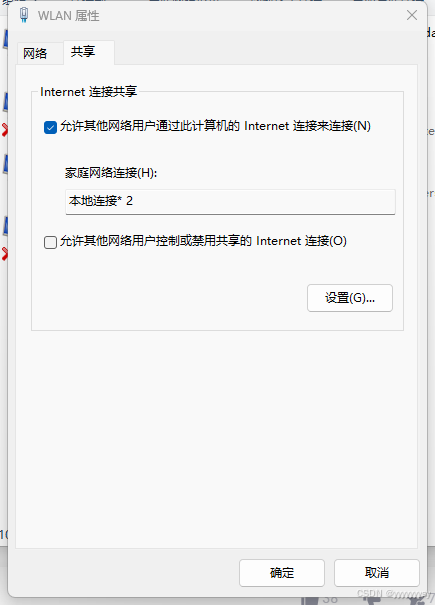
大家打开控制面板,找到网络和Internet,点开网络和共享中心,更改高级适配器设置,这时你会发现多出来的本地连接*?(以我这里本地连接*2为例)就是你的移动热点,右键点击WLAN属性注意!!!!注意!!!!是WLAN的属性别点错了!
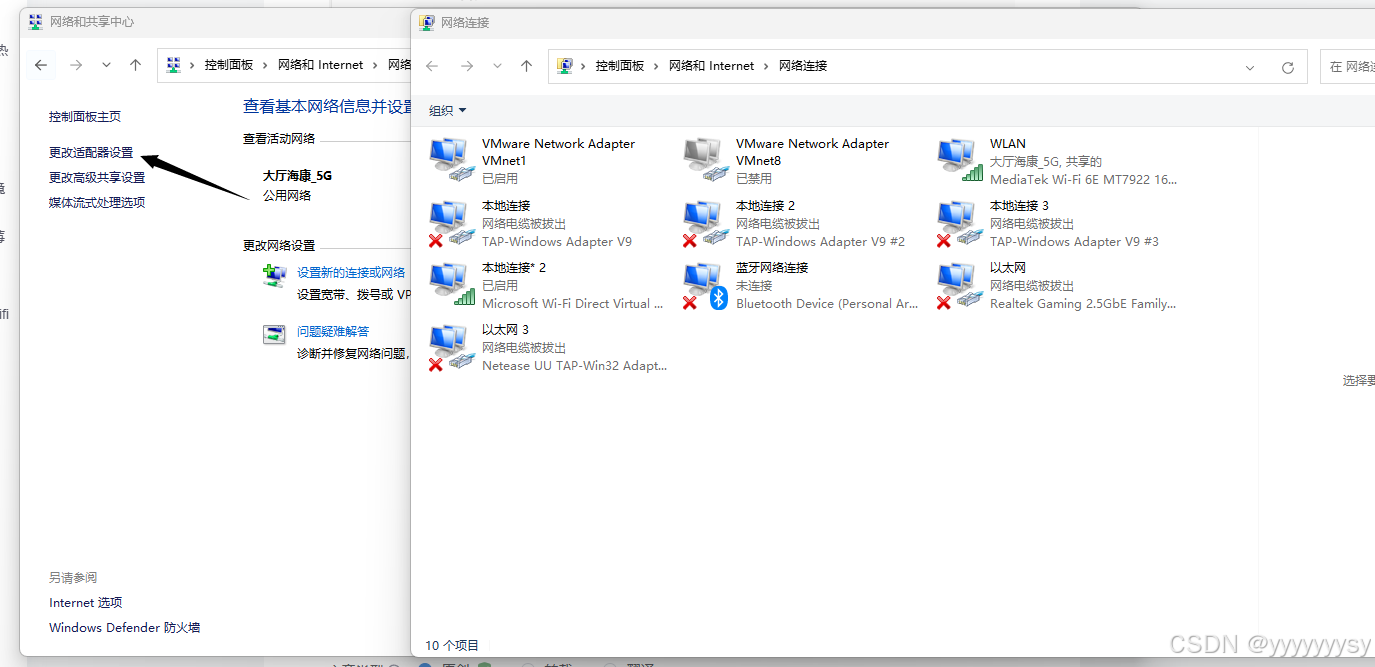
勾选允许其他网络用户连接,选择本地连接*2(以你的移动热点名字),当然也有不少小伙伴原本就是勾选的但是下面是以太网,解决办法:先取消勾选,退出属性,再点击WLAN属性,再次勾选,就能选择下面的家庭网络连接了!
通过以上方法,我成功解决了这个困扰了我许久的问题!!!这里注意一下,我的网络频带是2.4G频率,因为我的树莓派是4B版本的,可以接收2.4GHz和5GHz的频率,有的树莓派版本只可接收2.4GHz频率,所以就需要自己手动更改一下。
好了接下来就是重新启动树莓派的时刻了!
重新启动树莓派
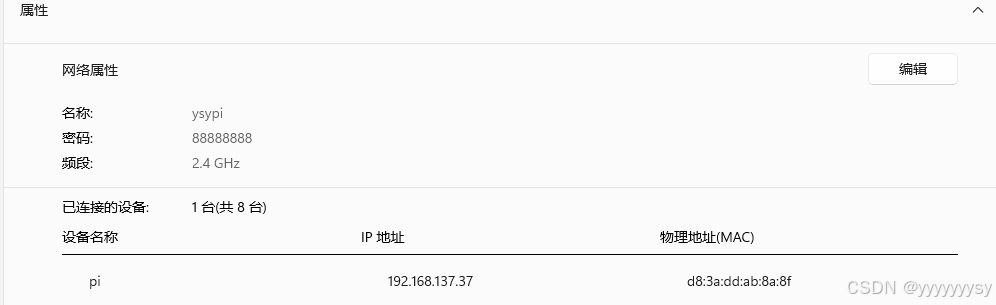
如果上述步骤没有差错的话,你的电脑端能够看见已连接树莓派的ip地址即(192.168.137.37)这是我树莓派的ip地址。此时我们并没有显示器,所以我们需要通过远程ssh登录来进入ubuntu系统中。
下载远程ssh登录软件MobaXterm
下载地址:适用于 Windows 的 MobaXterm 免费 Xserver 和选项卡式 SSH 客户端
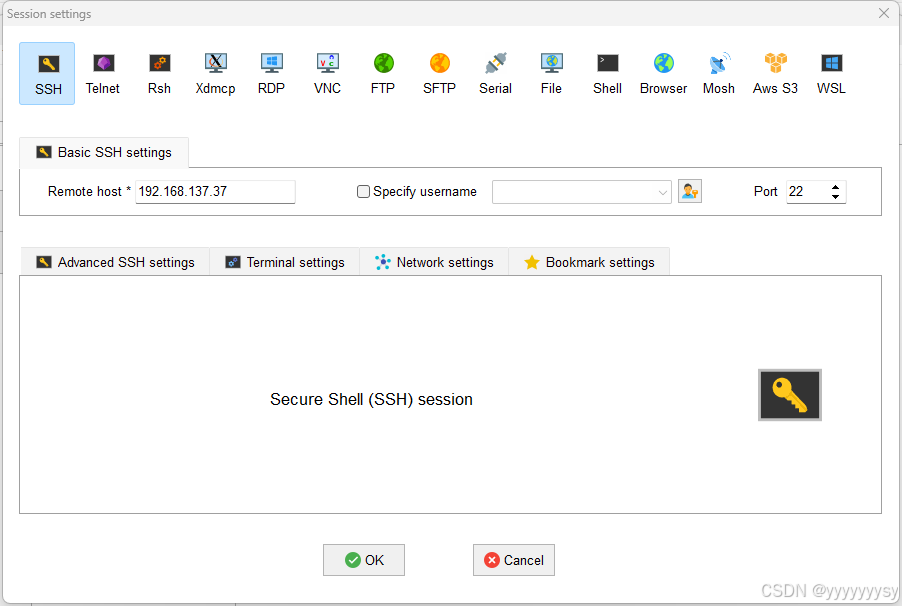
下载成功后进入软件点击左上角Session,将移动热点中所看到树莓派ip地址填入Remote host中,接着点击OK。
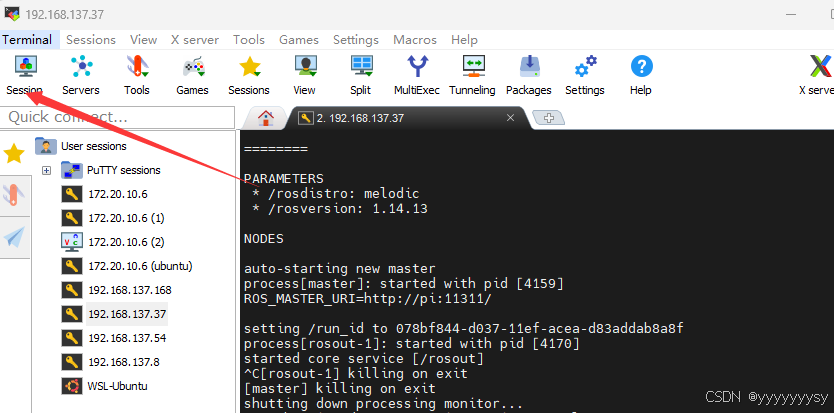
此时会看见这样的界面,第一行输入你之前设置的ubuntu用户名,下面输入密码(密码是不会显示的 不是你卡了)

登录成功后的界面如图所示,这就是一个ubuntu系统,到此你还记得容易吗?别急,后面还有大工程!
检测网络
ifconfig
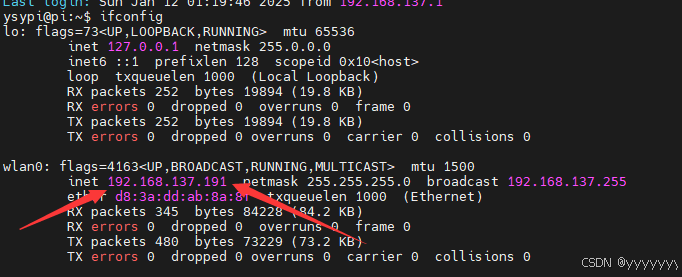 这就是你树莓派的ip地址。
这就是你树莓派的ip地址。
ping www.baidu.com测试度娘,如下图所示即为网络正常,可以上网了

4.安装Ubuntu桌面
因为有些像我一样的小白,不喜欢看命令行,所以急需一个桌面版,我也将教大家如何安装ubuntu的桌面版本。后续使用ROS的rviz, gazebo等仿真工具,都需要桌面图形环境。桌面安装就是和报错做斗争的过程了。
先输入下述指令
sudo apt-get upgrade报错提示:
E: Could not get lock /var/lib/dpkg/lock-frontend - open (11: Resource temporarily unavailable)
E: Unable to acquire the dpkg frontend lock (/var/lib/dpkg/lock-frontend), is another process using it?
尝试关闭进程
sudo killall apt apt-get
报错提示:
apt: no process found
apt-get: no process found
修改以下部分(一行一行输入):
sudo rm /var/lib/apt/lists/lock
sudo rm /var/cache/apt/archives/lock
sudo rm /var/lib/dpkg/lock*
sudo dpkg --configure -a
sudo apt update
完成以上设置(没有报错的前提下)基本就可以安装Ubuntu桌面了
开始安装!
sudo apt-get install ubuntu-desktop
等待亿会(看你的网速吧!)
安装成功关机重启(我搞来了块显示器给大家演示成功的效果!)
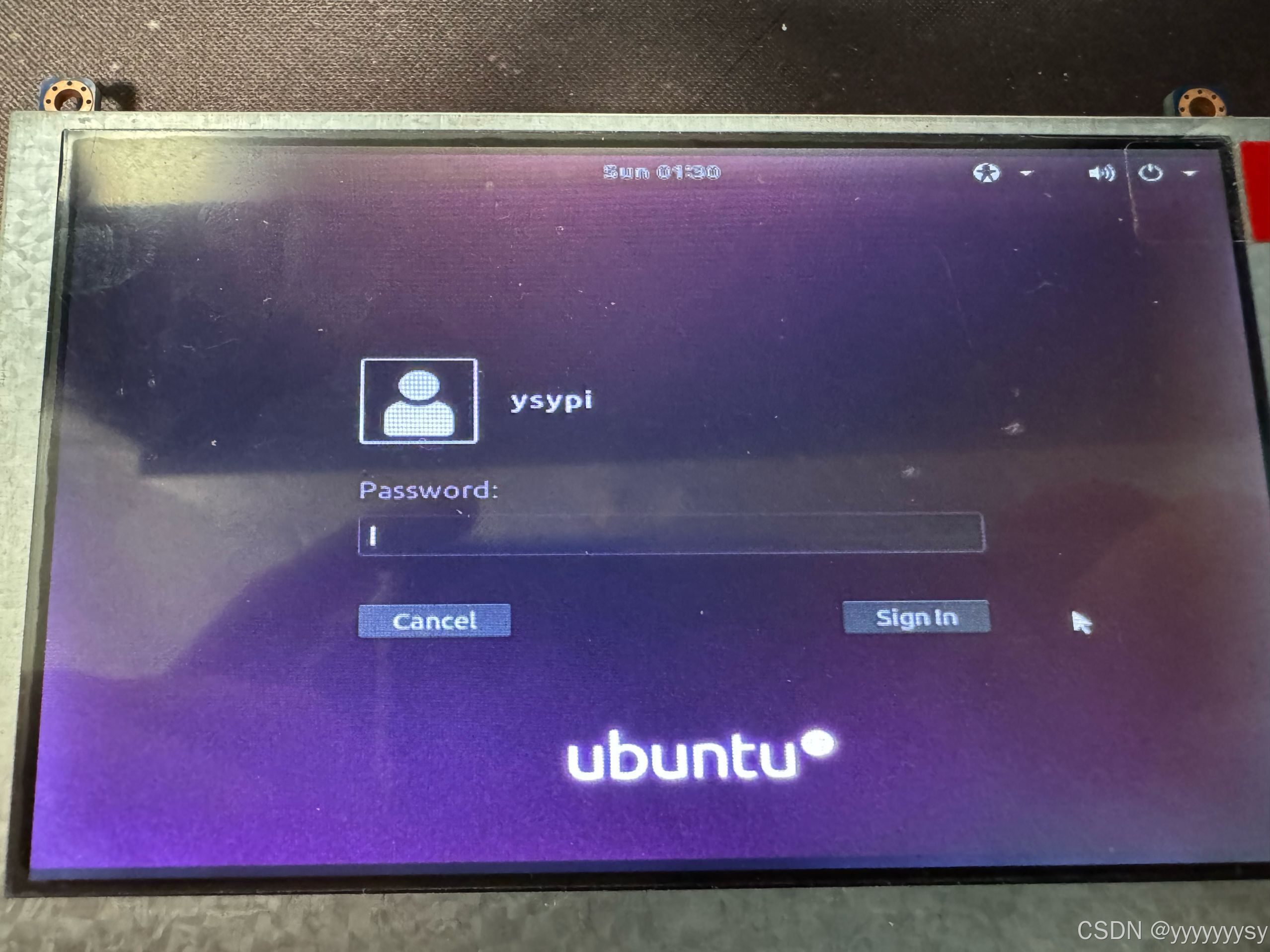

出现上面的效果就说明你的ubuntu桌面版已经安装成功啦!是不是有些挑战性!
接下来我们将继续安装ROS1
5.安装ROS1
对于初学者来说,最难的关卡莫非是开发环境的的搭建,特别是在Ubuntu系统上ROS系统安装时后出现的各种报错以及失败,我将给大家详细讲述ROS系统的一键安装过程,适用于18.04及以后的Ubuntu系统版本,大大缩减了大家作为初学者搭建ROS环境的时间。
这里不得不提到一位ROS大佬,那就是鱼香ROS,小鱼开发了一系列便捷的一键安装工具,帮助用户快速搭建ROS开发环境,大大降低了初学者的入门门槛,他的公众号和官网提供了丰富的学习资源,几乎每日更新。鱼香ROS通过他的专业知识、丰富的实战经验、以及对社区的贡献,成为了ROS领域的一位重要专家,帮助无数开发者顺利入门和深入学习ROS技术。
所以本文采用鱼香ROS大佬的一键安装来配置ROS1。
然而我在自己安装出现了下面这些错误,也困扰了我好长时间,感兴趣的小伙伴也可以先跳过这步,先去采用鱼香ROS的一键安装看看会不会出现跟我一样的报错,然后按照我提供的思路来解决这个报错问题。纯小白还是先跟着我的步骤,把这个错误解决。
安装过程出现的问题
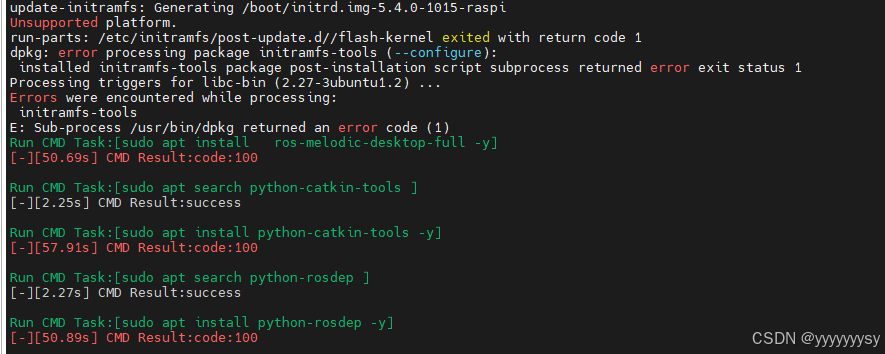
问题描述:
dpkg: 处理软件包 initramfs-tools (–configure)时出错:
已安装 initramfs-tools 软件包 post-installation 脚本 子进程返回错误状态 1
在处理时有错误发生:
initramfs-tools
E: Sub-process /usr/bin/dpkg returned an error code (1)
解决办法:
依次输入下面七条指令
sudo mv /var/lib/dpkg/info /var/lib/dpkg/info_oldsudo mkdir /var/lib/dpkg/infosudo apt-get updatesudo apt-get -f installsudo mv /var/lib/dpkg/info/* /var/lib/dpkg/info_oldrm -rf /var/lib/dpkg/infosudo mv /var/lib/dpkg/info_old /var/lib/dpkg/info没有出现报错后,我们正式开始安装ROS!!!
正式安装ROS
在终端输入
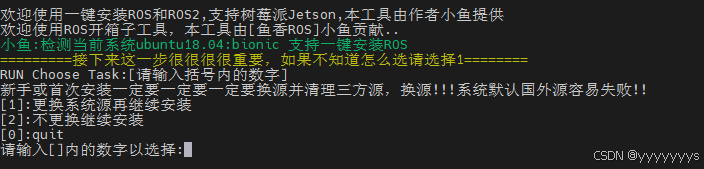
wget http://fishros.com/install -O fishros && . fishros会出现下面这些选项,我们选择1,输入1,安装ROS 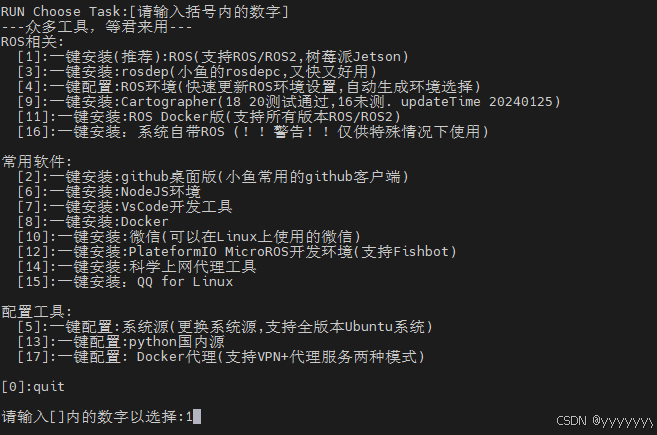
我们选择1更换系统源再继续安装(小鱼已经给的很详细了步骤)
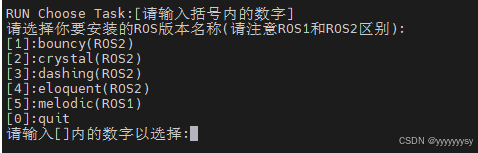
我们选择5,ROS1 Melodic版本(ubuntu18.04对应的ROS版本)
稍等一会安装完成后,大家就正式完成了ubuntun系统桌面版的安装以及ROS1的安装,给自己鼓个掌吧!
验证是否成功安装
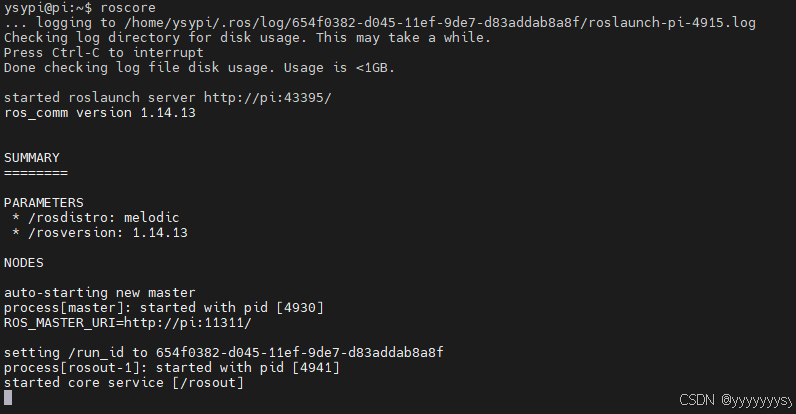
打开一个终端输入
roscore
再打开一个终端启动小海龟运行节点
rosrun turtlesim turtlesim_node
再打开一个终端启动小海龟运动控制节点
rosrun turtlesim turtle_teleop_key
额额额,大家自行操作吧屏幕太小了我不会玩=v=
好了,史上最最最详细的树莓派4B安装ubuntu系统18.04桌面版以及ROS1教程!!(不需要网线和显示屏!)就这样告一段落了!有任何问题欢迎大家在评论区探讨哦!

















 755
755

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









