










ROV架构篇在这里:https://blog.csdn.net/zanran8/article/details/116331778?spm=1001.2014.3001.5501
今天该介绍电子舱内部的设计。
电子舱可以说是ROV的“大脑”,这个“大脑”的好坏和聪明程度决定了ROV的性能。电子舱也可以分为以下三部分:
1,供电系统
2,通信系统
3,控制系统
供电系统是所有系统的基础,供电系统的稳定直接决定整个系统的健壮性。本文以锂电池供电为例,常见的是3S锂电池,4S锂电池,6S锂电池,放电电流和容量根据自己的需求去选择。电池的选择见此贴(https://blog.csdn.net/zanran8/article/details/114666375?spm=1001.2014.3001.5501)。
供电系统可以总结为以下部分:
1,上电部分:因为ROV工作的时候功率很大,一般最大功率都在1000W以上,电流都在50A以上。所以不可能用那么大的电流的开关,只能采用低电压控制高电压,小电流控制大电流的方案。主要就是利用MOS管或者继电器来设计电路,个人经验来看继电器的稳定性更好一点。
2,分电部分:整个ROV系统有多个器件,其中各个器件需要的电压是不同的,所以需要分电,原理就是集成DCDC,产生不同的电压。比如说电池电压25.2V,通信系统需要12V,MCU需要5V,传感器需要3.3V,所以供电系统需要产生这些电压让各个器件都能正常工作。值得注意的是选择DCDC的时候,还需要考虑功率,比如传感器是需要5W,而DCDC只能提供3W,那就不合适了。
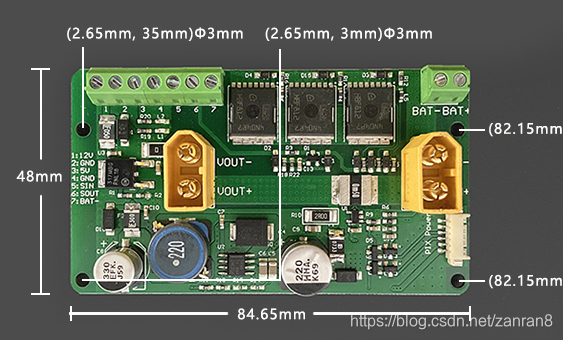
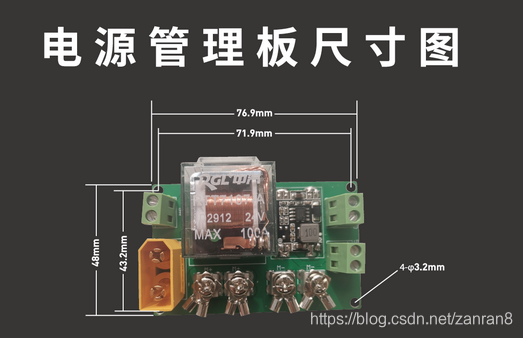
(网上现有的一些方案。)
以上仅为个人浅见,如有错误,还请指正!
有兴趣的小伙伴可以加一下QQ898023874,一起学习,共同进步!

















 2622
2622

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









