







 本文详细介绍了E-NCAP的AEB测试项目,包括2018版的AEBCCR追尾和AEBVRU弱势道路使用者测试,以及2020版可能的更新与发展规划,如引入更严格的测试场景和全新的测试项目。
本文详细介绍了E-NCAP的AEB测试项目,包括2018版的AEBCCR追尾和AEBVRU弱势道路使用者测试,以及2020版可能的更新与发展规划,如引入更严格的测试场景和全新的测试项目。
序 言
AEB作为一项重要的主动安全功能,目前已普遍纳入全球主要汽车市场的碰撞安全评分体系,其中E-NCAP率先于2014年将AEB纳入评分体系,并于2016年将AEB VRU纳入评分体系。
本文将主要介绍2018版E-NCP中AEB相关测试项目、2020版E-NCAP与AEB 的可能变化及后续发展规划。
一、2018版E-NCAP测试项目
E-NCAP中AEB的测试主要包括AEB CCR(追尾)和AEB VRU(弱势道路使用者)两部分,以下分别介绍。
1、AEB CCR
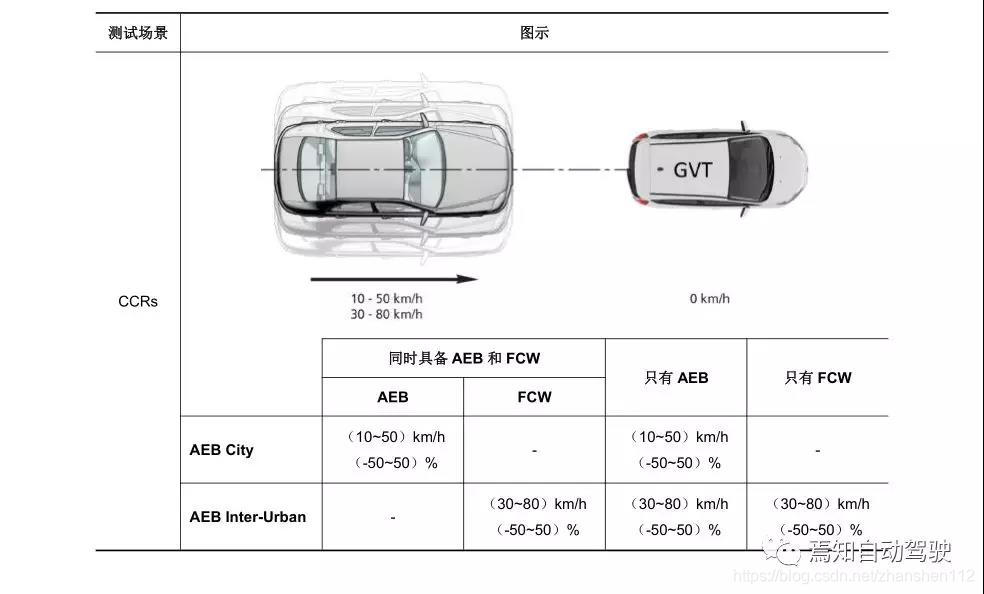
E-NCAP中定义的AEB CCR包括CCRs(前程静止)、CCRm(前车运动)和CCRb(前车制动)三大测试场景,具体见下表1:
表 1 E-NCAP(Version 2.0 March 2017)_AEB CCR测试场景
续表1:
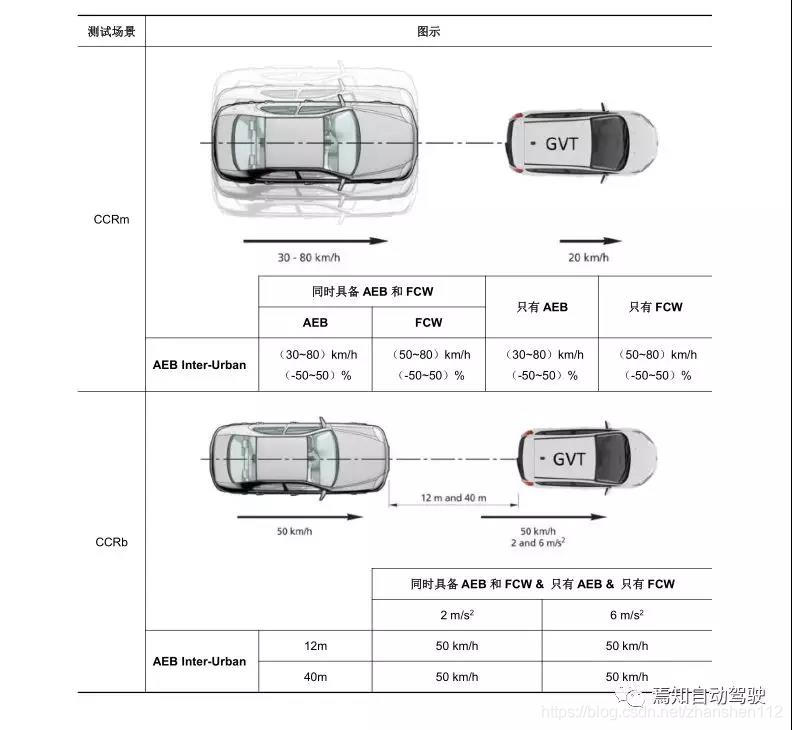
*注:1)CCRs和CCRb中车速以10km/h为变化步长,横向重叠率以25%为变化步长;2)CCRb中GVT需要在1s内达到期望减速度,且误差不超过±0.25 m/s2。
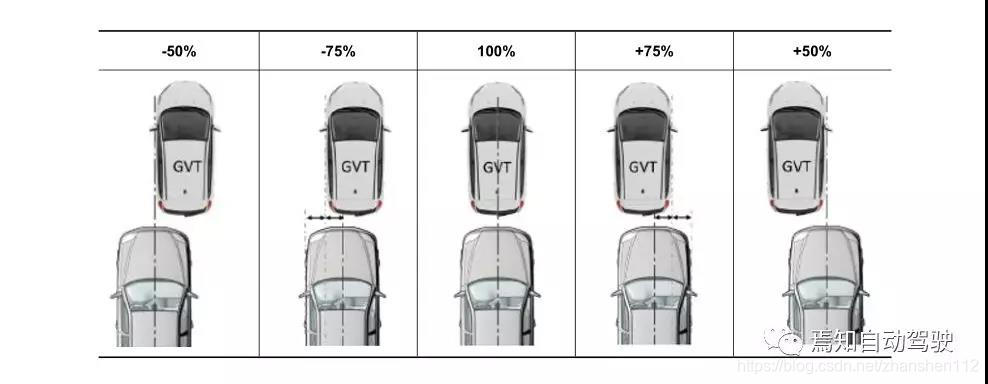
上表中的横向重叠率指VUT(测试车)与GVT(全尺寸目标车)在横向的重叠率,当VUT与GVT的X向轴线完全重合时,定义横向重叠率为100%,其它-50%、-75%、75%、50%横向重叠率定义见下表2:
表 2 VUT与GVT横向重叠率
2、AEB VRU
2018版C-NCAP中AEB VRU仅考虑成年人的情况,而E-NCAP中AEB VRU除了考虑成年人外,还会考虑儿童和骑自行车的人。
E-NCAP(Version 2.0 March 2017)中定义的AEBVRU_Pedestrian和AEB VRU_Bicyclist测试场景定义分别见表3、表4。
表3 E-NCAP(Version 2.0 March 2017)_AEB VRU_Pedestrian测试场景
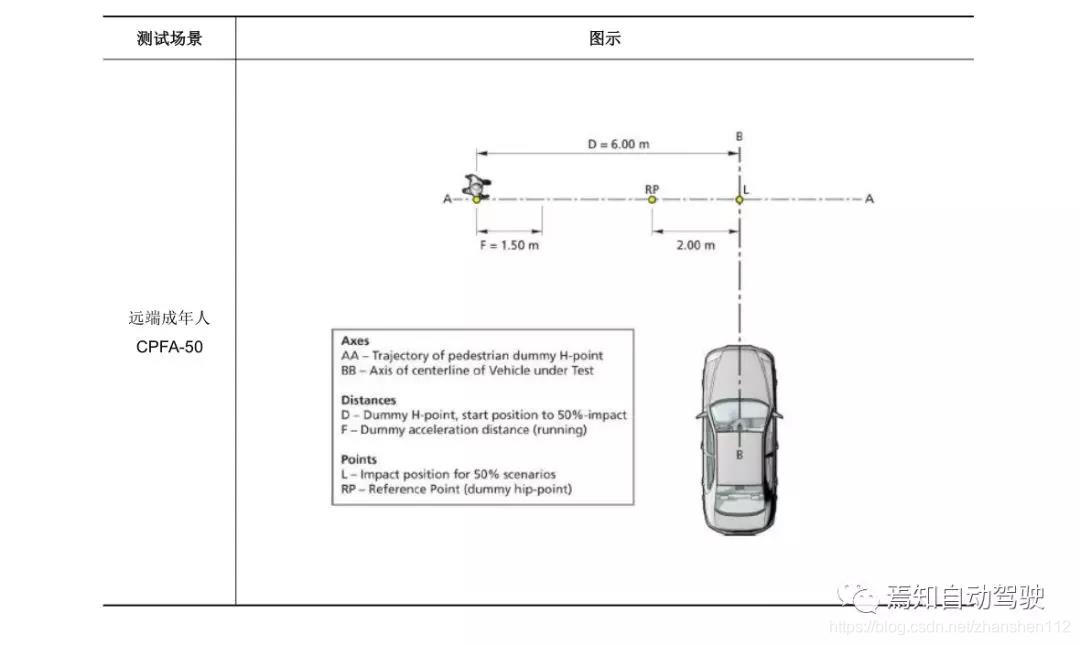
续表3:
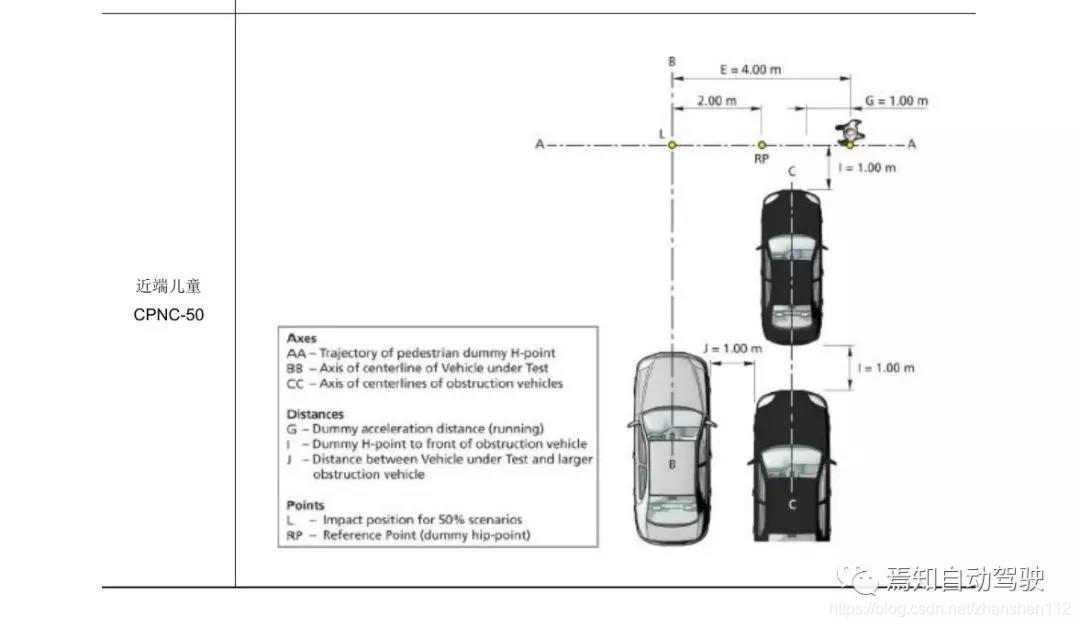
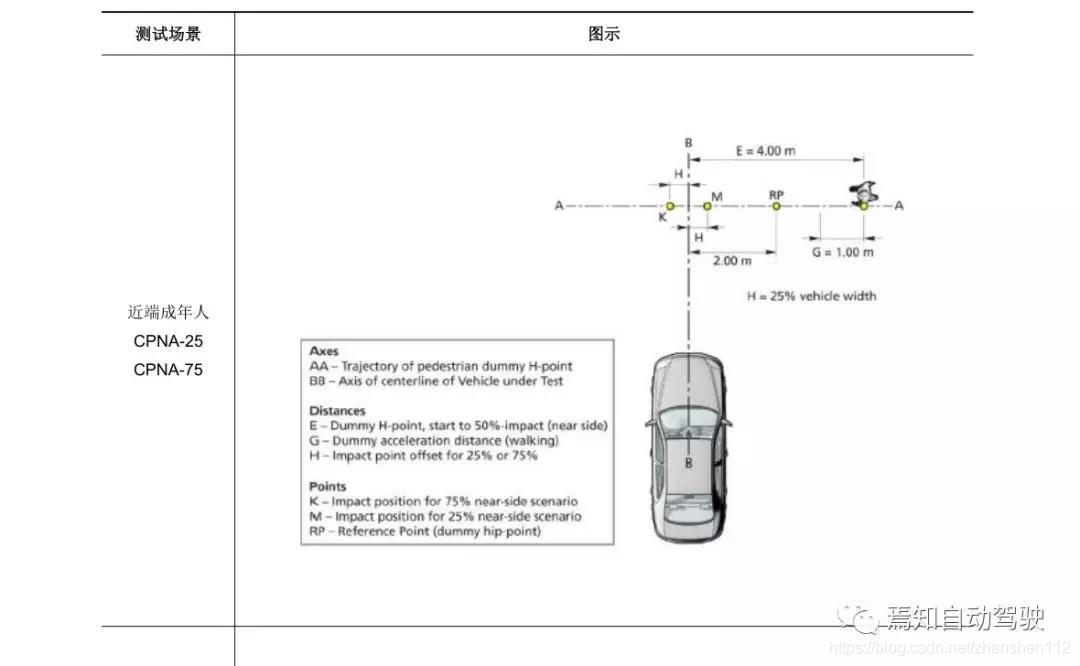
续表3:
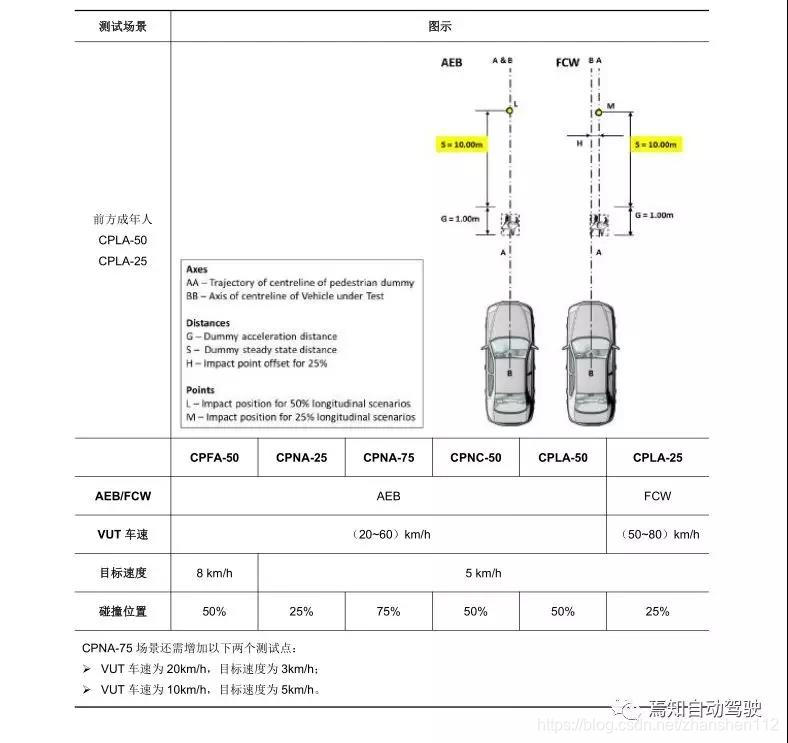
*注:上表中所有测试车速均以5km/h为变化步长。
表 4 E-NCAP(Version 2.0 March 2017)_AEB VRU_Bicyclist测试场景
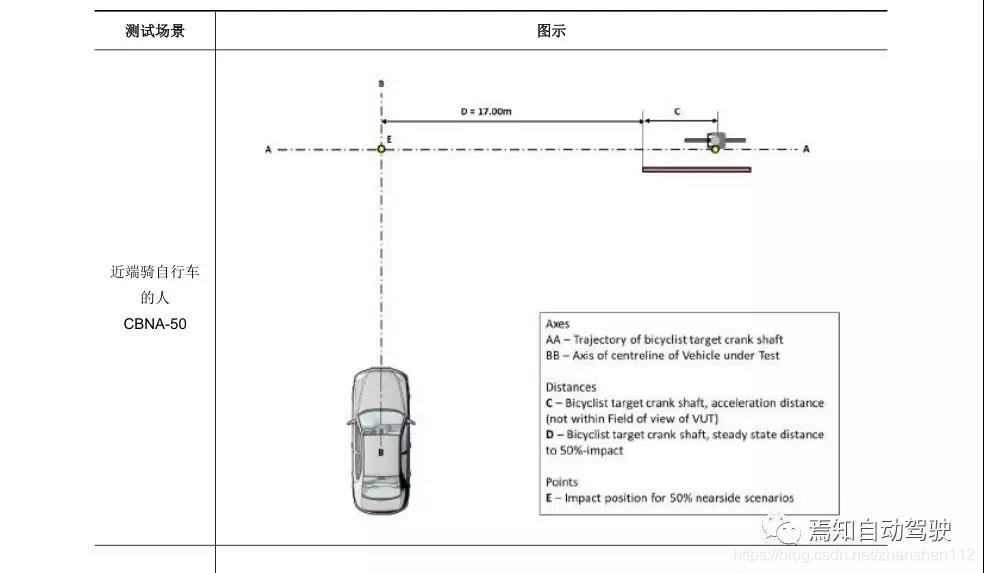
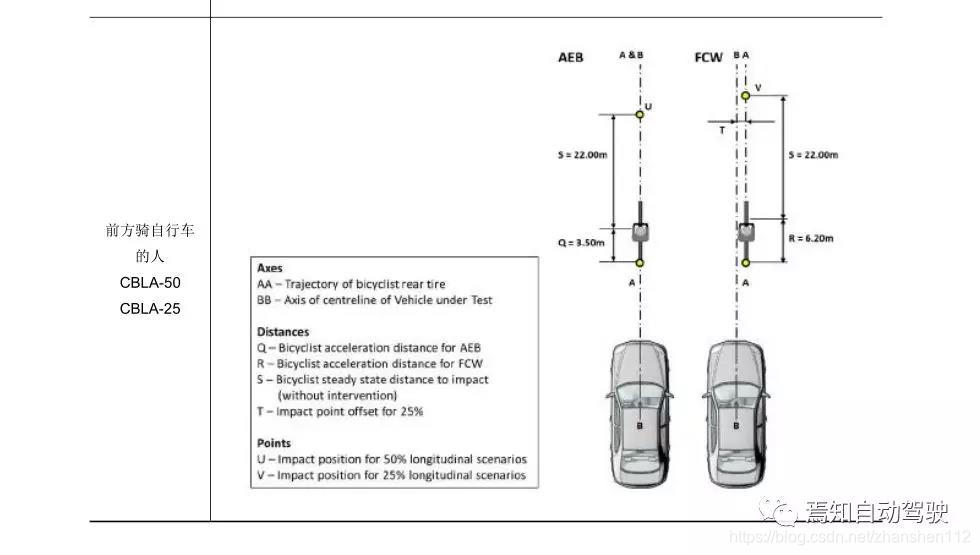
续表4:
| CBNA-50 | CBLA-50 | CBLA-25 | |
| AEB/FCW | AEB | FCW | |
| VUT车速 | (20~60)km/h | (25~60)km/h | (50~80)km/h |
| 目标速度 | 15 km/h | 20 km/h | |
| 碰撞位置 | 50% | 25% | |
*注:上表中所有测试车速均以5km/h为变化步长。
3、全尺寸目标车
E-NCAP中要求采用全尺寸目标车(GVT),其与C-NCAP中要求的非全尺寸目标车(VT)对比见下表5:
表 5 E-NCAP和C-NCAP对于目标车辆要求对比

二、2020版E-NCAP可能的变化
根据目前了解的信息,2020版E-NCAP中对于AEB VRU的测试将会更加严格,将会引入新的测试场景,其中AEB VRU_Bicyclist和AEB VRU_Pedestrian的测试场景见下表6及下表7。
表 6 2020版E-NCAP AEB VRU_Bicyclist测试场景
| CVNB | CVNBO | CVFB | CVLB | ||
| VUT车速 | (10~60)km/h | (10~60)km/h | (10~60)km/h | (20~60)km/h | (50~80)km/h |
| 自行车速度 | 15 km/h | 10 km/h | 20 km/h | 15 km/h | 20 km/h |
| 碰撞点 | (0~50)% | (0~50)% | (0~50)% | (0~50)% | (0~50)% |
续表6:
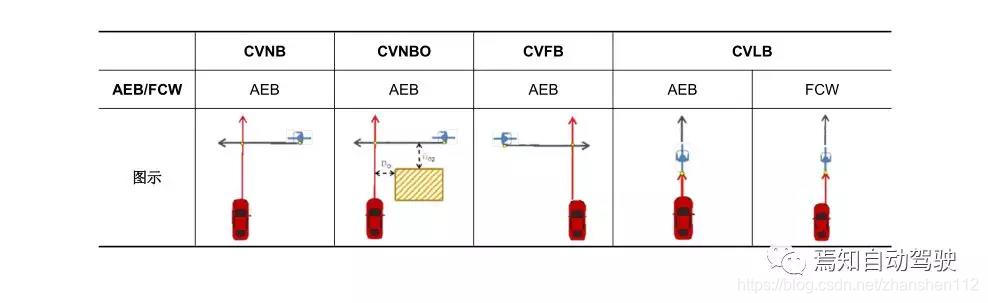
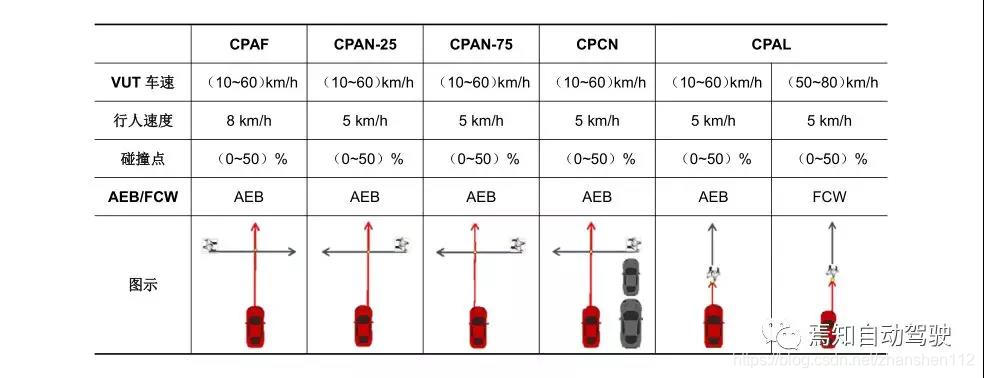
表 7 2020版E-NCAP AEB VRU_Pedestrian测试场景
三、E-NCAP AEB测试发展规划
根据目前公布的E-NCAP发展规划,在未来几年,将会持续引入AEB VRU_Pedestrian-Back over(后向行人保护)、AEB - Junction-Crossing(交叉路口AEB)、AEB – Head-on(迎面)等全新测试场景。
其中AEB VRU_Pedestrian-Backover的功能为系统检测到车辆后方人的存在,并自动启动制动或防止加速,能很大程度上防止车辆倒车时和行人发生碰撞事故。AEB - Junction-Crossing主要针对车对车、车对行人、车对PTW(机动两轮车)的交叉路口及转弯场景的AEB测试。AEB – Head-on是模拟车辆正面头碰头的场景。
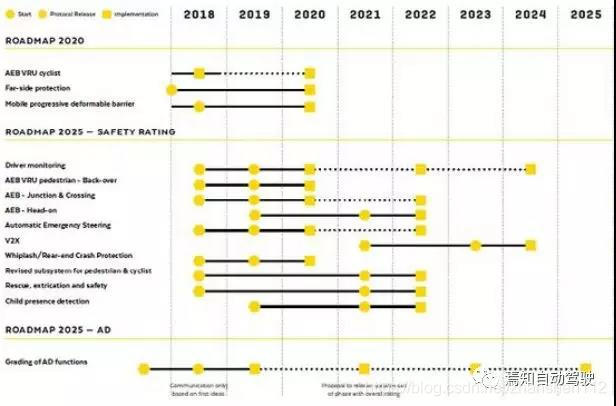
图 E-NCAP发展规划

















 530
530

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









