







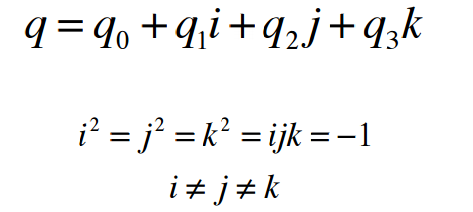
四元数(Quaternions)
四元数表示旋转
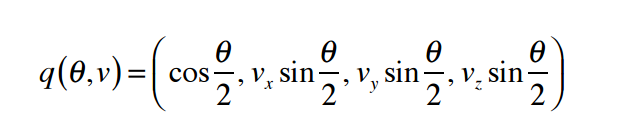
用四个变量表示三个自由度的旋转,是不是过约束?
其实四元数表示的旋转是被归一化的,所以多一个变量表示Scale。
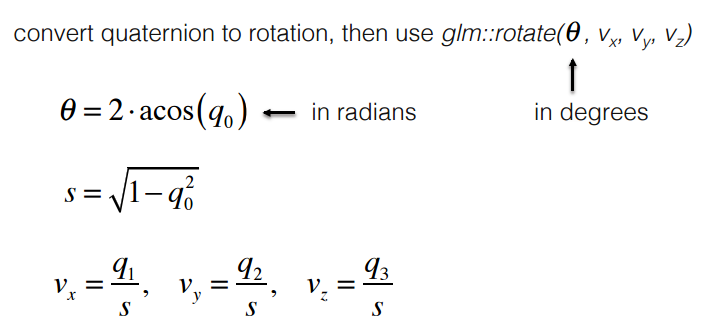
四元数反解角度
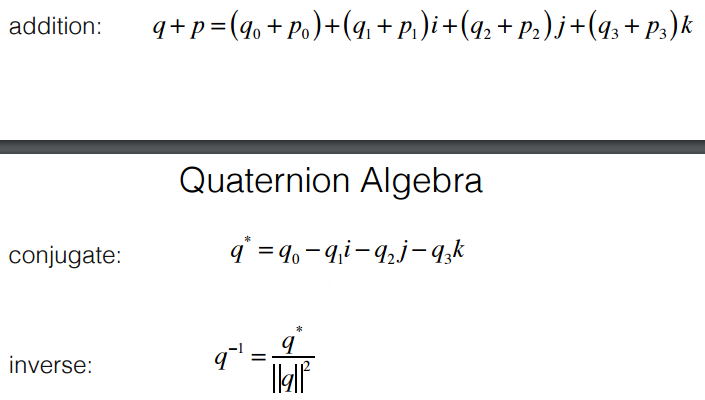
四元数代数学
单位化四元数:

四元数向量(代表3D点 或者 向量),不需要归一化:
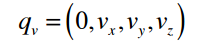
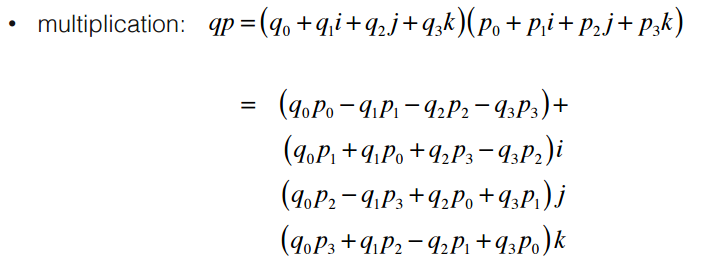
不同于向量四元数,所有表示旋转的四元数都是单位四元数,绕q旋转向量四元数Qp(q既包含旋转角度也包含旋转轴向量)

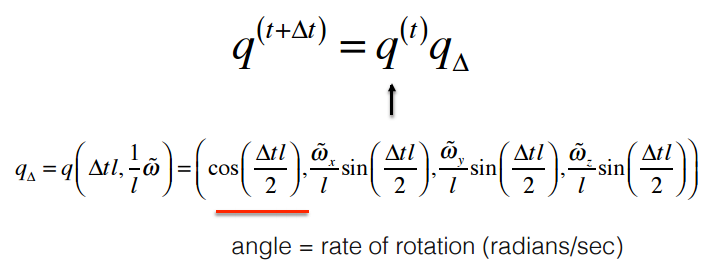
连续旋转

陀螺仪姿态解算算法:


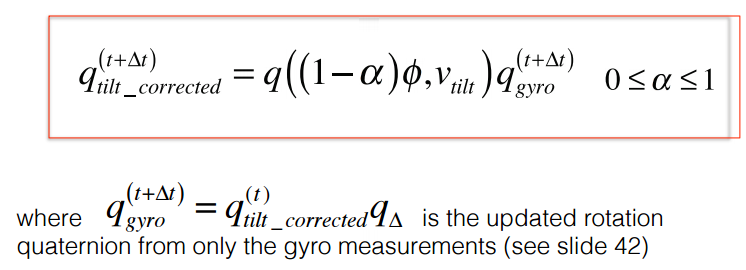
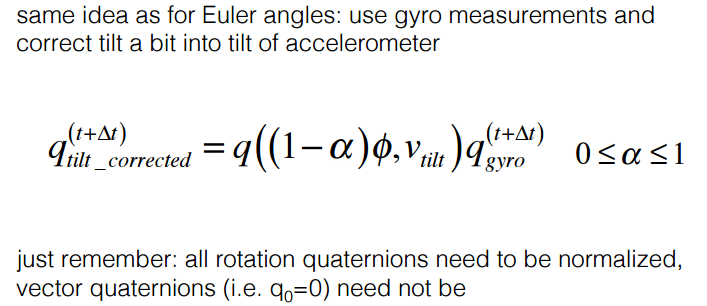
加速度计修正陀螺仪输出角度
加速度输出:
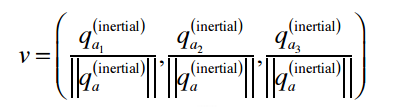
计算向量v和UP轴(0,1,0)夹角:

计算v和UP轴之间归一化旋转向量:
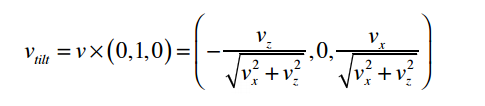
从而得到倾斜修正四元数

互补滤波















 1603
1603

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









