







 本文介绍了如何通过安装和使用MATLAB官方插件"Real-Time Pacer for Simulink",在Simulink中实现仿真时长与真实时间相等。在遇到Simulink Desktop Real-Time模块库无法解决问题时,可以借助此插件解决仿真时间同步的问题。
本文介绍了如何通过安装和使用MATLAB官方插件"Real-Time Pacer for Simulink",在Simulink中实现仿真时长与真实时间相等。在遇到Simulink Desktop Real-Time模块库无法解决问题时,可以借助此插件解决仿真时间同步的问题。
目录
1. 概述
上篇文章《MATLAB | Simulink仿真时间与实际时间同步的设置》介绍了根据Simulink Desktop Real-Time模块库和Real-Time Kernel实现仿真时长等于真实时长的功能,但是,我在另一台电脑上进行仿真时却报错。在网上搜索了很多解决办法,都没有任何效果,不过我也找到了另一种方法来实现这个功能。
其实,这个问题有很多大神都已经遇到过了,并且有的大神还针对这个问题开发了相关的插件,发布在MATLAB官网上。
2. 安装插件
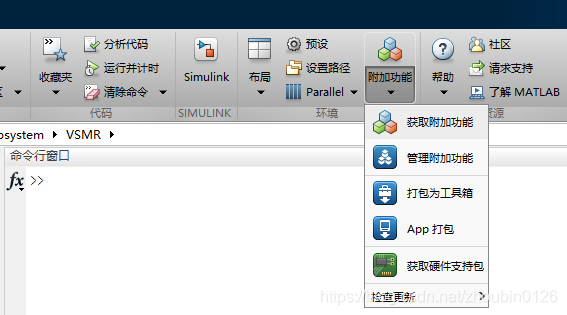
在MATLAB的主页上,点击“附加功能→获取附加功能”,打开附加功能管理器。
在附加功能管理器中,找到“Real-Time Pacer for Simulink”插件 ,点击进入该插件的页面,在右上角选择“添加”即可。在此过程中,需要登录自己的MATLAB账号。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











