




Stribeck摩擦模型是一种用来描述摩擦力随速度变化的非线性动态模型,广泛应用于分析机械系统中的摩擦行为,尤其是在低速或速度变化时的摩擦力特性。
1. Stribeck 摩擦模型的概述
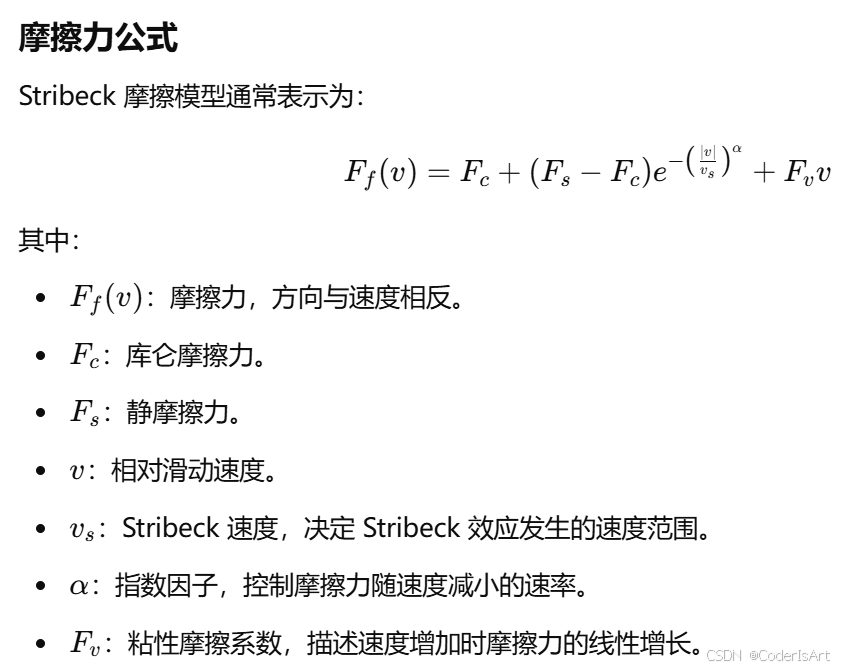
Stribeck 摩擦模型用来描述摩擦力与滑动速度之间的关系,能够捕捉以下摩擦特性:
- 静摩擦力 (FsF_sFs):物体从静止开始移动时需要克服的最大摩擦力。
- 库仑摩擦力 (FcF_cFc):物体以恒定速度滑动时的摩擦力,为恒值。
- 粘性摩擦力 (FvF_vFv):随速度增加而增加,与速度成正比。
- Stribeck 效应:速度从零开始增加时,摩擦力从静摩擦逐渐减小到库仑摩擦,呈现非线性下降趋势。
2. Stribeck 摩擦模型的特性
(1) 低速区域
当 v≈0v \approx 0v≈0 时,摩擦力接近静摩擦力 FsF_sFs,同时呈现非线性变化。Stribeck 效应在这一阶段显著。
(2) 中速区域
随着速度的增加,摩擦力逐渐下降并趋于库仑摩擦力 FcF_cFc,此时摩擦力几乎与速度无关。
(3) 高速区域
在高速状态下,粘性摩擦力 FvvF_v vFvv 逐渐显现,摩擦力开始随速度线性增加。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 997
997

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









